S-ar putea să vă placă și
- Hexcrawler: Kit Assembly, Tuning and Example ProgramDocument95 paginiHexcrawler: Kit Assembly, Tuning and Example ProgramKarthik ReddyÎncă nu există evaluări
- Claw's Depths: Scale: 10 YardsDocument1 paginăClaw's Depths: Scale: 10 Yardsdon_porter_19Încă nu există evaluări
- Keep On The Shadowfell Pathfinder ConversionDocument5 paginiKeep On The Shadowfell Pathfinder ConversionMark YfjÎncă nu există evaluări
- Dungeon Rollers PlaytestDocument9 paginiDungeon Rollers PlaytestnescentÎncă nu există evaluări
- Dyson ' S Delve Dungeon GeomorphsDocument18 paginiDyson ' S Delve Dungeon GeomorphsFabio BragaÎncă nu există evaluări
- Overland Terrain Map Tiles PDFDocument48 paginiOverland Terrain Map Tiles PDFi2thÎncă nu există evaluări
- Simulacrum Wilderness ExplorationDocument2 paginiSimulacrum Wilderness ExplorationPawel JanasÎncă nu există evaluări
- Under Xylarthen's TowerDocument21 paginiUnder Xylarthen's Towerjrients100% (1)
- Raging Swan - Village Backdrop - ArcmoorDocument13 paginiRaging Swan - Village Backdrop - ArcmoorEu Mesmo100% (1)
- Character SheetDocument2 paginiCharacter SheetAlejandro Romero ValenciaÎncă nu există evaluări
- Hexcrawl Worksheet PDFDocument1 paginăHexcrawl Worksheet PDFCraigJellyStellyÎncă nu există evaluări
- Hinterland Peoples and PerilsDocument32 paginiHinterland Peoples and PerilsYour MamaÎncă nu există evaluări
- COR4-12 Key To The Grave ARDocument1 paginăCOR4-12 Key To The Grave ARJosh JasperÎncă nu există evaluări
- Anselm - Human MagicianDocument2 paginiAnselm - Human MagicianJohn SmithÎncă nu există evaluări
- Galdar, Human Male Clr1 (St. Cuthbert) : SZ M : Amulet. Note That Several of The Characters Here HaveDocument5 paginiGaldar, Human Male Clr1 (St. Cuthbert) : SZ M : Amulet. Note That Several of The Characters Here HavefsultanaÎncă nu există evaluări
- d20 Dark Quest City Guide Harbor Side Mess HallDocument20 paginid20 Dark Quest City Guide Harbor Side Mess HallMikael HasselÎncă nu există evaluări
- SCRAWL - 6. Presence of A Hero (No Rules)Document24 paginiSCRAWL - 6. Presence of A Hero (No Rules)Sawyer, “Aster”Încă nu există evaluări
- Basic Fantasy Character Sheet 3 PDFDocument1 paginăBasic Fantasy Character Sheet 3 PDFasiriÎncă nu există evaluări
- BWG Screen WoundsDocument1 paginăBWG Screen WoundsPhil PrestonÎncă nu există evaluări
- CCVF Option - Random Character CreationDocument7 paginiCCVF Option - Random Character CreationRavenCrowÎncă nu există evaluări
- Last Resort 06Document33 paginiLast Resort 06Morkizga100% (1)
- Card Capture: A Solitaire Deck Builder Using A Standard Deck of 54 Playing CardsDocument4 paginiCard Capture: A Solitaire Deck Builder Using A Standard Deck of 54 Playing CardsFEDERICO ARTURO ORIGEL MORENOÎncă nu există evaluări
- SCRAWL - 1. Unnatural Hatcheries of The Ant PrinceDocument2 paginiSCRAWL - 1. Unnatural Hatcheries of The Ant PrinceSawyer, “Aster”Încă nu există evaluări
- Uncle Aldo's Devils Bargains EmporiumDocument4 paginiUncle Aldo's Devils Bargains EmporiumradvioletsÎncă nu există evaluări
- Character SheetDocument2 paginiCharacter SheetPaulo FrotaÎncă nu există evaluări
- Scalemail V1Document11 paginiScalemail V1Will DoyleÎncă nu există evaluări
- Random Name Tables for Fantasy SettingsDocument38 paginiRandom Name Tables for Fantasy SettingsKevin PerrineÎncă nu există evaluări
- Classic Modules Today A0 Danger at Darkshelf QuarryDocument9 paginiClassic Modules Today A0 Danger at Darkshelf QuarryPhil AlbertÎncă nu există evaluări
- Scrawl - 3. Entry PitsDocument2 paginiScrawl - 3. Entry PitsSawyer, “Aster”Încă nu există evaluări
- Day of The DwarfDocument46 paginiDay of The DwarfEric Johnson0% (1)
- 100 Creepy Things and Events To Find in A Spooky House PDFDocument20 pagini100 Creepy Things and Events To Find in A Spooky House PDFwelwazhr7367Încă nu există evaluări
- My First Edition RecDocument3 paginiMy First Edition RecBaron_GreystoneÎncă nu există evaluări
- 0one Games - UNDRE007 - The Dungeon Under The Mountain, Rooms & Encounters - Shrine of The Sisterhood (L1, R11)Document15 pagini0one Games - UNDRE007 - The Dungeon Under The Mountain, Rooms & Encounters - Shrine of The Sisterhood (L1, R11)joferma0100% (1)
- BanditsDocument48 paginiBanditsRon Leiper100% (1)
- HexCrawl Encounters 0.8Document32 paginiHexCrawl Encounters 0.8JoseManuel100% (1)
- Random NPC Motives PDFDocument2 paginiRandom NPC Motives PDFWolmir NemitzÎncă nu există evaluări
- Moor TroubleDocument17 paginiMoor Troublestefano vitelloneÎncă nu există evaluări
- Dead FireDocument31 paginiDead FireRenato Eiras100% (2)
- IceDocument1 paginăIceiatb2Încă nu există evaluări
- Agon Sheets 03242020Document7 paginiAgon Sheets 03242020pacalypseÎncă nu există evaluări
- The Great Big Random D100 of Interesting NPC's (D&D5e) PDFDocument10 paginiThe Great Big Random D100 of Interesting NPC's (D&D5e) PDFAgostinhoÎncă nu există evaluări
- The Galley of Death: An Adventure Module From The GM's Secret StashDocument7 paginiThe Galley of Death: An Adventure Module From The GM's Secret StashMilo Smith100% (1)
- The Tomb of Oddli StoneDocument5 paginiThe Tomb of Oddli StoneScott PersonsÎncă nu există evaluări
- FFXI Soloing GuideDocument7 paginiFFXI Soloing GuidePhil50% (2)
- The Gibbering Tower PDFDocument2 paginiThe Gibbering Tower PDFMrToad100% (1)
- Quick Kingdom 5 e GeneratorDocument8 paginiQuick Kingdom 5 e GeneratorTedTschoppÎncă nu există evaluări
- Basic Unknown RPG Players HandbookDocument26 paginiBasic Unknown RPG Players Handbookjobatett2Încă nu există evaluări
- HM2 TheHuntforIstanDocument16 paginiHM2 TheHuntforIstanJoshua Griset100% (1)
- Simple DND Party Tracking SheetsDocument5 paginiSimple DND Party Tracking SheetsDannilo Amorim CerqueiraÎncă nu există evaluări
- DF14 Level 1-3Document44 paginiDF14 Level 1-3lifes2short100% (5)
- Phar Oah' S Tomb - Upper: Mi X & Match!Document7 paginiPhar Oah' S Tomb - Upper: Mi X & Match!altonath100% (1)
- Wolves in The BorderlandDocument7 paginiWolves in The BorderlandRush Wingate100% (1)
- Darker Dungeons Download VersionDocument353 paginiDarker Dungeons Download VersionBrandon E. PaulÎncă nu există evaluări
- Trouble at The Imp and BuckleDocument10 paginiTrouble at The Imp and BuckleGeorge FuryÎncă nu există evaluări
- Seven Voyages of Zylarthen Alternate Encumbrance RulesDocument7 paginiSeven Voyages of Zylarthen Alternate Encumbrance RulesJRS100% (1)
- Village Backdrop - ThornhillDocument11 paginiVillage Backdrop - Thornhilldonnie100% (1)
- BASIC Stamp Manual v2-0Document353 paginiBASIC Stamp Manual v2-0Rogers ArismendiÎncă nu există evaluări
- Robotics!: Student GuideDocument56 paginiRobotics!: Student GuideanggotaÎncă nu există evaluări
- Propeller ManualDocument399 paginiPropeller ManualJon_Britton_2095Încă nu există evaluări
- How To Generate Your First 20,000 Followers On InstagramDocument44 paginiHow To Generate Your First 20,000 Followers On InstagramAdrian Pratama100% (1)
- 22 Caltex Philippines, Inc. vs. Commission On Audit, 208 SCRA 726, May 08, 1992Document36 pagini22 Caltex Philippines, Inc. vs. Commission On Audit, 208 SCRA 726, May 08, 1992milkteaÎncă nu există evaluări
- Make $50 A Day Autopilot MethodDocument4 paginiMake $50 A Day Autopilot MethodJadon BoytonÎncă nu există evaluări
- MockupDocument1 paginăMockupJonathan Parra100% (1)
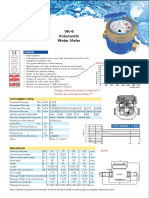
- Baylan: VK-6 Volumetric Water MeterDocument1 paginăBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaÎncă nu există evaluări
- AX CLI Ref v2 4 3-20100621Document718 paginiAX CLI Ref v2 4 3-20100621VisiGodÎncă nu există evaluări
- PhysRevResearch 4 043041Document6 paginiPhysRevResearch 4 043041marco juradoÎncă nu există evaluări
- Demoversion IWE 2011Document47 paginiDemoversion IWE 2011Burag HamparyanÎncă nu există evaluări
- PrefaceDocument16 paginiPrefaceNavaneeth RameshÎncă nu există evaluări
- Math30.CA U1l1 PolynomialFunctionsDocument20 paginiMath30.CA U1l1 PolynomialFunctionsUnozxcv Doszxc100% (1)
- 6 Acop v. OmbudsmanDocument1 pagină6 Acop v. OmbudsmanChester Santos SoniegaÎncă nu există evaluări
- MatrikonOPC Server For Simulation Quick Start Guide PDFDocument2 paginiMatrikonOPC Server For Simulation Quick Start Guide PDFJorge Perez CastañedaÎncă nu există evaluări
- Wyckoff e BookDocument43 paginiWyckoff e BookIan Moncrieffe95% (22)
- Educ 3 ReviewerDocument21 paginiEduc 3 ReviewerMa.Lourdes CamporidondoÎncă nu există evaluări
- Critical Aspects in Simulating Cold Working Processes For Screws and BoltsDocument4 paginiCritical Aspects in Simulating Cold Working Processes For Screws and BoltsstefanomazzalaiÎncă nu există evaluări
- Lab Equipment Catalog Research Concept LabDocument40 paginiLab Equipment Catalog Research Concept LabSeetanshu AwasthiÎncă nu există evaluări
- Guideline 3 Building ActivitiesDocument25 paginiGuideline 3 Building ActivitiesCesarMartinezÎncă nu există evaluări
- ICT FX4Model FrameworkDocument20 paginiICT FX4Model FrameworkSnowÎncă nu există evaluări
- Memo in Motion For ContemptDocument118 paginiMemo in Motion For ContemptMark SternÎncă nu există evaluări
- Dr Nael Qtati's E-Commerce Business Models Week 1 CourseDocument28 paginiDr Nael Qtati's E-Commerce Business Models Week 1 CourseMohammed LubbadÎncă nu există evaluări
- 110 TOP Single Phase Induction Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsDocument42 pagini110 TOP Single Phase Induction Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive Examsvijay_marathe01Încă nu există evaluări
- Supply AnalysisDocument5 paginiSupply AnalysisCherie DiazÎncă nu există evaluări
- PROTON Preve 2012 On 4 DR Sal 1.6 Premium (CFE) AUTO 138Bhp (A) (04/12-)Document12 paginiPROTON Preve 2012 On 4 DR Sal 1.6 Premium (CFE) AUTO 138Bhp (A) (04/12-)bluhound1Încă nu există evaluări
- Analytic Solver Platform For Education: Setting Up The Course CodeDocument2 paginiAnalytic Solver Platform For Education: Setting Up The Course CodeTrevor feignarddÎncă nu există evaluări
- Moi University: School of Business and EconomicsDocument5 paginiMoi University: School of Business and EconomicsMARION KERUBOÎncă nu există evaluări
- Portfolio Corporate Communication AuditDocument8 paginiPortfolio Corporate Communication Auditapi-580088958Încă nu există evaluări
- Socomec EN61439 PDFDocument8 paginiSocomec EN61439 PDFdesportista_luisÎncă nu există evaluări
- GeM Bidding 2568310Document9 paginiGeM Bidding 2568310SICURO INDIAÎncă nu există evaluări
- Eileen MarcelDocument3 paginiEileen Marcelapi-3825833Încă nu există evaluări
- Lessee Information StatementDocument1 paginăLessee Information Statementmja.carilloÎncă nu există evaluări
- Badasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersDe la EverandBadasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersEvaluare: 4 din 5 stele4/5 (15)
- The Score Takes Care of Itself: My Philosophy of LeadershipDe la EverandThe Score Takes Care of Itself: My Philosophy of LeadershipEvaluare: 4.5 din 5 stele4.5/5 (81)
- Elevate and Dominate: 21 Ways to Win On and Off the FieldDe la EverandElevate and Dominate: 21 Ways to Win On and Off the FieldEvaluare: 5 din 5 stele5/5 (4)
- What Winners Won't Tell You: Lessons from a Legendary DefenderDe la EverandWhat Winners Won't Tell You: Lessons from a Legendary DefenderEvaluare: 4.5 din 5 stele4.5/5 (7)
- The Mentor Leader: Secrets to Building People and Teams That Win ConsistentlyDe la EverandThe Mentor Leader: Secrets to Building People and Teams That Win ConsistentlyEvaluare: 4.5 din 5 stele4.5/5 (40)
- The TB12 Method: How to Achieve a Lifetime of Sustained Peak PerformanceDe la EverandThe TB12 Method: How to Achieve a Lifetime of Sustained Peak PerformanceEvaluare: 4 din 5 stele4/5 (92)
- Uncommon: Finding Your Path to SignificanceDe la EverandUncommon: Finding Your Path to SignificanceEvaluare: 4.5 din 5 stele4.5/5 (81)
- Friday Night Lights: A Town, a Team, and a DreamDe la EverandFriday Night Lights: A Town, a Team, and a DreamEvaluare: 4 din 5 stele4/5 (606)
- The Mixer: The Story of Premier League Tactics, from Route One to False NinesDe la EverandThe Mixer: The Story of Premier League Tactics, from Route One to False NinesEvaluare: 4.5 din 5 stele4.5/5 (36)
- The Mentor Leader: Secrets to Building People and Teams That Win ConsistentlyDe la EverandThe Mentor Leader: Secrets to Building People and Teams That Win ConsistentlyEvaluare: 4.5 din 5 stele4.5/5 (4)
- Coming Back Stronger: Unleashing the Hidden Power of AdversityDe la EverandComing Back Stronger: Unleashing the Hidden Power of AdversityEvaluare: 4 din 5 stele4/5 (98)
- College Football Schemes and Techniques: Offensive Field GuideDe la EverandCollege Football Schemes and Techniques: Offensive Field GuideÎncă nu există evaluări
- The TB12 Method: How to Achieve a Lifetime of Sustained Peak PerformanceDe la EverandThe TB12 Method: How to Achieve a Lifetime of Sustained Peak PerformanceEvaluare: 3.5 din 5 stele3.5/5 (21)
- Barca: The Making of the Greatest Team in the WorldDe la EverandBarca: The Making of the Greatest Team in the WorldEvaluare: 4.5 din 5 stele4.5/5 (21)
- Boys Will Be Boys: The Glory Days and Party Nights of the Dallas Cowboys DynastyDe la EverandBoys Will Be Boys: The Glory Days and Party Nights of the Dallas Cowboys DynastyEvaluare: 4 din 5 stele4/5 (83)
- Mind Gym: An Athlete's Guide to Inner ExcellenceDe la EverandMind Gym: An Athlete's Guide to Inner ExcellenceEvaluare: 3 din 5 stele3/5 (18)
- The Mosquito Bowl: A Game of Life and Death in World War IIDe la EverandThe Mosquito Bowl: A Game of Life and Death in World War IIEvaluare: 4 din 5 stele4/5 (46)
- Mind Gym: An Athlete's Guide to Inner ExcellenceDe la EverandMind Gym: An Athlete's Guide to Inner ExcellenceEvaluare: 3.5 din 5 stele3.5/5 (18)
- Red on Red: Liverpool, Manchester United and the fiercest rivalry in world footballDe la EverandRed on Red: Liverpool, Manchester United and the fiercest rivalry in world footballEvaluare: 5 din 5 stele5/5 (4)
- Junior Seau: The Life and Death of a Football IconDe la EverandJunior Seau: The Life and Death of a Football IconEvaluare: 4.5 din 5 stele4.5/5 (5)
- Gunslinger: The Remarkable, Improbable, Iconic Life of Brett FavreDe la EverandGunslinger: The Remarkable, Improbable, Iconic Life of Brett FavreEvaluare: 4.5 din 5 stele4.5/5 (29)
- The Eagles of Heart Mountain: A True Story of Football, Incarceration, and Resistance in World War II AmericaDe la EverandThe Eagles of Heart Mountain: A True Story of Football, Incarceration, and Resistance in World War II AmericaEvaluare: 4.5 din 5 stele4.5/5 (7)
- NFL Confidential: True Confessions from the Gutter of FootballDe la EverandNFL Confidential: True Confessions from the Gutter of FootballEvaluare: 4 din 5 stele4/5 (46)
- The Mixer: The Story of Premier League Tactics, from Route One to False NinesDe la EverandThe Mixer: The Story of Premier League Tactics, from Route One to False NinesEvaluare: 4.5 din 5 stele4.5/5 (75)
- Soccer Analytics: Assess Performance, Tactics, Injuries and Team Formation through Data Analytics and Statistical AnalysisDe la EverandSoccer Analytics: Assess Performance, Tactics, Injuries and Team Formation through Data Analytics and Statistical AnalysisEvaluare: 3 din 5 stele3/5 (3)