S-ar putea să vă placă și
- Digital Modulations using MatlabDe la EverandDigital Modulations using MatlabEvaluare: 4 din 5 stele4/5 (6)
- EE4314Lab 2 Fall2013Document7 paginiEE4314Lab 2 Fall2013Edú CárdenasÎncă nu există evaluări
- MATPOWER - A MATLAB Power System Simulation PackageDocument35 paginiMATPOWER - A MATLAB Power System Simulation Packageemanuelcnn38Încă nu există evaluări
- Power System Prac 2 2020Document5 paginiPower System Prac 2 2020S’ne MNGUNIÎncă nu există evaluări
- EE463 Project 131Document4 paginiEE463 Project 131skyline1122Încă nu există evaluări
- SCM - 11 01 2005Document18 paginiSCM - 11 01 2005Marius FerdyÎncă nu există evaluări
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsDe la EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsÎncă nu există evaluări
- Ohlins Tool Manual 2017Document46 paginiOhlins Tool Manual 2017Pier o.f.r.Încă nu există evaluări
- Inspection References CaterpillarDocument58 paginiInspection References CaterpillarRforceIbañez100% (2)
- Oxygen Booster ManualDocument27 paginiOxygen Booster ManualAldo Tolaba Quiroga100% (3)
- MatDyn1 2Document35 paginiMatDyn1 2Miguel AcbÎncă nu există evaluări
- M: Steady-State Operations, Planning and Analysis Tools For Power Systems Research and EducationDocument9 paginiM: Steady-State Operations, Planning and Analysis Tools For Power Systems Research and EducationphanthitheÎncă nu există evaluări
- Psat PaperDocument8 paginiPsat PaperTibin JosephÎncă nu există evaluări
- Dssim-Xx Communication Library For Labview®: NtroductionDocument15 paginiDssim-Xx Communication Library For Labview®: NtroductionErick LopezÎncă nu există evaluări
- First Explanation of The ToolDocument2 paginiFirst Explanation of The ToolAndrei StativaÎncă nu există evaluări
- Matlab SimulinkDocument12 paginiMatlab Simulinkmanjuu_eeeÎncă nu există evaluări
- ECE486 Lab ManualDocument106 paginiECE486 Lab ManualDR ARINDAM SENÎncă nu există evaluări
- ATPMAT: An Open Source Toolbox For Systematic Creation of EMTP Cases in ATP Using MatlabDocument6 paginiATPMAT: An Open Source Toolbox For Systematic Creation of EMTP Cases in ATP Using MatlabLalo PatoÎncă nu există evaluări
- Power System Stabilizer Data Collection Form PSS - Study - Doc InstructionsDocument4 paginiPower System Stabilizer Data Collection Form PSS - Study - Doc Instructionsabdulkadir aliÎncă nu există evaluări
- Power System Stabilizer Data Collection Form PSS - Study - Doc InstructionsDocument4 paginiPower System Stabilizer Data Collection Form PSS - Study - Doc Instructionsabdulkadir aliÎncă nu există evaluări
- Applied Matpower For Power System Optimization ResearchDocument5 paginiApplied Matpower For Power System Optimization ResearchQuang Nguyen KhanhÎncă nu există evaluări
- Power System Transient Anna University Notes in PDFDocument44 paginiPower System Transient Anna University Notes in PDFLeng SovannarithÎncă nu există evaluări
- ATAT Interface: Contributed by Long XunDocument32 paginiATAT Interface: Contributed by Long XunDong YehÎncă nu există evaluări
- Test Plan & Test Cases in Matlab: Revision Error: Reference Source Not FoundDocument9 paginiTest Plan & Test Cases in Matlab: Revision Error: Reference Source Not Foundnayeem4444Încă nu există evaluări
- 9bus System, Power FlowDocument17 pagini9bus System, Power FlowZeeshan AhmedÎncă nu există evaluări
- Implementation of New Features in Atpdraw Version 3:, IncludingDocument7 paginiImplementation of New Features in Atpdraw Version 3:, IncludingGeum Kang SanÎncă nu există evaluări
- Matlab Functions CMDocument7 paginiMatlab Functions CMNuraddeen MagajiÎncă nu există evaluări
- Matlab Basic and Application To Smart Grid: Dr. Atma Ram Gupta Gunjesh Tahiliani (2014306) Rohit Ray (32014315)Document26 paginiMatlab Basic and Application To Smart Grid: Dr. Atma Ram Gupta Gunjesh Tahiliani (2014306) Rohit Ray (32014315)Rohit RoyÎncă nu există evaluări
- Creation of Stability Index For Micro Grids: I. Vokony, A. Dán DRDocument4 paginiCreation of Stability Index For Micro Grids: I. Vokony, A. Dán DRrazarazaeeÎncă nu există evaluări
- An Open Source Power System Analysis Toolbox: Federico Milano, Member, IEEEDocument8 paginiAn Open Source Power System Analysis Toolbox: Federico Milano, Member, IEEEgdbaghaÎncă nu există evaluări
- Guia Matrix Fitting MATLABDocument45 paginiGuia Matrix Fitting MATLABThomaz PithonÎncă nu există evaluări
- IEEE 6 Bus System in PSAT PaperDocument7 paginiIEEE 6 Bus System in PSAT PaperJulie OsborneÎncă nu există evaluări
- Spice Analyse OutputDocument10 paginiSpice Analyse OutputZealous_ShumbhÎncă nu există evaluări
- An Investigation Into The Capabilities of MATLAB Power System Toolbox For Small Signal Stability Analysis in Power SystemsDocument7 paginiAn Investigation Into The Capabilities of MATLAB Power System Toolbox For Small Signal Stability Analysis in Power SystemsMadhusudhan SrinivasanÎncă nu există evaluări
- Lab 1 - Power System Economic OperationDocument3 paginiLab 1 - Power System Economic OperationMd Anisur RahmanÎncă nu există evaluări
- Power System Analysis ToolboxDocument29 paginiPower System Analysis ToolboxCésar Enrique Arroyo Marin100% (1)
- Power System Analysis ToolboxDocument29 paginiPower System Analysis ToolboxRamaprasad PandaÎncă nu există evaluări
- Motor Design Suite V12Document60 paginiMotor Design Suite V12Trần Trung HiếuÎncă nu există evaluări
- Three Phase Current - Simple CalculationDocument7 paginiThree Phase Current - Simple CalculationRinda_RaynaÎncă nu există evaluări
- QuickGuide 2018Document7 paginiQuickGuide 2018daliÎncă nu există evaluări
- Network Reduction ToolboxDocument2 paginiNetwork Reduction ToolboxMANUEL ALEXANDER CADENA CENTENOÎncă nu există evaluări
- MATLAB Implementation of The 3GPP Spatial Channel Model (3GPP TR 25.996)Document18 paginiMATLAB Implementation of The 3GPP Spatial Channel Model (3GPP TR 25.996)Satadal GuptaÎncă nu există evaluări
- Quantum Espresso Inputfile ExplantionDocument31 paginiQuantum Espresso Inputfile ExplantionPHYSICS PROBLEMSÎncă nu există evaluări
- Basic MATLAB CommandsDocument3 paginiBasic MATLAB Commandsbill obrienÎncă nu există evaluări
- Its413 Assignment TemplateDocument2 paginiIts413 Assignment Templateابتهاج عبدالسلامÎncă nu există evaluări
- Power Syystem 2 Lab ManualDocument20 paginiPower Syystem 2 Lab ManualSHAILENDRA KUMARÎncă nu există evaluări
- Solving Power Flow Problems With A Matlab Implementation of The Power System Applications Data DictionaryDocument7 paginiSolving Power Flow Problems With A Matlab Implementation of The Power System Applications Data DictionaryfpttmmÎncă nu există evaluări
- LAMMPSDocument92 paginiLAMMPSdaniyalhassan2789Încă nu există evaluări
- DSP Lab Manual For ECE 3 2 R09Document147 paginiDSP Lab Manual For ECE 3 2 R09Jandfor Tansfg Errott100% (2)
- Gams PowerDocument8 paginiGams Powerkaren dejoÎncă nu există evaluări
- JstatDocument7 paginiJstateldanidanÎncă nu există evaluări
- CMPS Lab ManualDocument64 paginiCMPS Lab Manualomi ChavanÎncă nu există evaluări
- Experiment 1Document13 paginiExperiment 1Mike QuinteroÎncă nu există evaluări
- Introduction To Computing With MATLAB: Gemechu FantaDocument27 paginiIntroduction To Computing With MATLAB: Gemechu FantachandraloveÎncă nu există evaluări
- 9.2.1.3 Lab - Designing and Implementing A Subnetted IPv4 Addressing SchemeDocument26 pagini9.2.1.3 Lab - Designing and Implementing A Subnetted IPv4 Addressing SchemesellysaidiÎncă nu există evaluări
- C2050 PDF App1Document6 paginiC2050 PDF App1Balaji GUÎncă nu există evaluări
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDe la EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningÎncă nu există evaluări
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- Computer Methods in Power Systems Analysis with MATLABDe la EverandComputer Methods in Power Systems Analysis with MATLABÎncă nu există evaluări
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesDe la EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- Chapter 3Document8 paginiChapter 3Marysol AyalaÎncă nu există evaluări
- A Practical Guide To Measuring The Hurst Parameter: Richard G. Clegg June 28, 2005Document13 paginiA Practical Guide To Measuring The Hurst Parameter: Richard G. Clegg June 28, 2005Marysol AyalaÎncă nu există evaluări
- BasicMatrixAndVectorFunctionsInVBA-V1 6 PDFDocument22 paginiBasicMatrixAndVectorFunctionsInVBA-V1 6 PDFMarysol AyalaÎncă nu există evaluări
- Basic ProbabilityDocument17 paginiBasic ProbabilityMarysol AyalaÎncă nu există evaluări
- Time Series Analysis: Integrated and Long-Memory ProcessesDocument51 paginiTime Series Analysis: Integrated and Long-Memory ProcessesMarysol AyalaÎncă nu există evaluări
- CagnanDocument1 paginăCagnanMarysol AyalaÎncă nu există evaluări
- WRR Ranger UncertaintyDocument23 paginiWRR Ranger UncertaintyMarysol AyalaÎncă nu există evaluări
- RESS Analyzing The Topological Electrical and Reliability Characteristics of A Power Transmission System For Identifying Its CDocument18 paginiRESS Analyzing The Topological Electrical and Reliability Characteristics of A Power Transmission System For Identifying Its CMarysol AyalaÎncă nu există evaluări
- Paper 410 1Document8 paginiPaper 410 1Marysol AyalaÎncă nu există evaluări
- Powergen Change TechnologieDocument4 paginiPowergen Change TechnologieMarysol AyalaÎncă nu există evaluări
- Vulnerability Assessment of A Large Sized Power System Using Neural Network Considering Various Feature Extraction MethodsDocument10 paginiVulnerability Assessment of A Large Sized Power System Using Neural Network Considering Various Feature Extraction MethodsMarysol AyalaÎncă nu există evaluări
- Sequential Outage Checkers For Analyzing Cascading Outages and Preventing Large BlackoutsDocument10 paginiSequential Outage Checkers For Analyzing Cascading Outages and Preventing Large BlackoutsMarysol AyalaÎncă nu există evaluări
- Intelli 2013 7 30 80127Document6 paginiIntelli 2013 7 30 80127Marysol AyalaÎncă nu există evaluări
- Utami 2014 Assessment Networks Indonesion FertilizerDocument13 paginiUtami 2014 Assessment Networks Indonesion FertilizerMarysol AyalaÎncă nu există evaluări
- Safety A White Paper Resilience Engineering For Atm PDFDocument16 paginiSafety A White Paper Resilience Engineering For Atm PDFMarysol AyalaÎncă nu există evaluări
- Campeanu 2014 Romania Impact RenewableDocument9 paginiCampeanu 2014 Romania Impact RenewableMarysol AyalaÎncă nu există evaluări
- Grenadier WangDocument45 paginiGrenadier WangMarysol AyalaÎncă nu există evaluări
- Art of Bowing For ViolinDocument19 paginiArt of Bowing For ViolinjcolkeÎncă nu există evaluări
- Ejor FinalDocument7 paginiEjor FinalMarysol AyalaÎncă nu există evaluări
- Carreras - Dobson 2004 Dynamics Blackouts R-SDocument10 paginiCarreras - Dobson 2004 Dynamics Blackouts R-SMarysol AyalaÎncă nu există evaluări
- Reliability Engineering and System Safety: John C. Whitson, Jose Emmanuel Ramirez-MarquezDocument9 paginiReliability Engineering and System Safety: John C. Whitson, Jose Emmanuel Ramirez-MarquezMarysol AyalaÎncă nu există evaluări
- Dusmanescu 2014 Implementation Renewable RomaniaDocument6 paginiDusmanescu 2014 Implementation Renewable RomaniaMarysol AyalaÎncă nu există evaluări
- 14 06-0007Document5 pagini14 06-0007Marysol AyalaÎncă nu există evaluări
- Romanian Power Market RenewableDocument66 paginiRomanian Power Market RenewableMarysol AyalaÎncă nu există evaluări
- Viorel Photovoltaic RomanianDocument8 paginiViorel Photovoltaic RomanianMarysol AyalaÎncă nu există evaluări
- Chile Earthquake Electricity 2010Document7 paginiChile Earthquake Electricity 2010Marysol AyalaÎncă nu există evaluări
- Veitch 1999 Wavelet Estimator HurstDocument20 paginiVeitch 1999 Wavelet Estimator HurstMarysol AyalaÎncă nu există evaluări
- Chile EarthquakeDocument9 paginiChile EarthquakeMarysol AyalaÎncă nu există evaluări
- Seismic Vulnerability of Lifelines in Greater Cairo: E.M. Dorra, P.J. Stafford & A.Y. ElghazouliDocument10 paginiSeismic Vulnerability of Lifelines in Greater Cairo: E.M. Dorra, P.J. Stafford & A.Y. ElghazouliMarysol AyalaÎncă nu există evaluări
- Delignieres 2006 Fractal Hurst Classical MethodsDocument20 paginiDelignieres 2006 Fractal Hurst Classical MethodsMarysol AyalaÎncă nu există evaluări
- Audesk InventorDocument7 paginiAudesk InventorEddy Wilder Zea UmiñaÎncă nu există evaluări
- Siebel MAADocument31 paginiSiebel MAAboddu24Încă nu există evaluări
- EAC PowerPoint Template 2019Document5 paginiEAC PowerPoint Template 2019LeeÎncă nu există evaluări
- Formula Notes For Cracking Fluid Mechanics For Gate by Jain SirDocument27 paginiFormula Notes For Cracking Fluid Mechanics For Gate by Jain SirSachin Saini93% (27)
- Electrostatic Powder PaintingDocument9 paginiElectrostatic Powder PaintingfirdausÎncă nu există evaluări
- Exxon 6101Document2 paginiExxon 6101M. Kürşad ArslanÎncă nu există evaluări
- Hydrographic Survey: Ecg 305: Chapter 7Document24 paginiHydrographic Survey: Ecg 305: Chapter 7Ahmad ZahirÎncă nu există evaluări
- Data Envelopment Analysis: Models and Extensions: Production/Operations ManagementDocument4 paginiData Envelopment Analysis: Models and Extensions: Production/Operations Managementmithunrecdgp100% (2)
- DocumentationDocument131 paginiDocumentationm_adnane_dz3184Încă nu există evaluări
- Delphi Heavy Duty Emissions Brochure 2011 2012Document100 paginiDelphi Heavy Duty Emissions Brochure 2011 2012Younwoo NamÎncă nu există evaluări
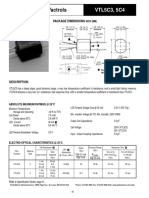
- Low Cost Axial Vactrols: VTL5C3, 5C4Document2 paginiLow Cost Axial Vactrols: VTL5C3, 5C4sillyÎncă nu există evaluări
- Civil & Environmental Engineering: Dept. Report October 2002Document40 paginiCivil & Environmental Engineering: Dept. Report October 2002Leonardo HernandezÎncă nu există evaluări
- q64DA PDFDocument1 paginăq64DA PDFSebastián LozadaÎncă nu există evaluări
- Energy Saving Basics - EsdsDocument40 paginiEnergy Saving Basics - Esdsapi-238581599Încă nu există evaluări
- Microgel Particles and Their Effect On The Textural Properties of FoodsDocument9 paginiMicrogel Particles and Their Effect On The Textural Properties of Foodsmsa_imegÎncă nu există evaluări
- Civil Works BuildingDocument22 paginiCivil Works BuildingSarinÎncă nu există evaluări
- Transmission - Approved List 26-09-2017Document554 paginiTransmission - Approved List 26-09-2017bkhÎncă nu există evaluări
- Honpe CatalogueDocument23 paginiHonpe CatalogueGrupo XDSÎncă nu există evaluări
- Ahmad Mustaqiem CVDocument4 paginiAhmad Mustaqiem CVAhmad MustaqiemÎncă nu există evaluări
- Cswip QuestionDocument3 paginiCswip Questionfasith9534Încă nu există evaluări
- Simple (Ideal) Vapor Compression Refrigeration Cycle ProblemsDocument3 paginiSimple (Ideal) Vapor Compression Refrigeration Cycle Problemssajawal hassanÎncă nu există evaluări
- Legend: Add Subject Remove Subject: Student Number Name of StudentDocument32 paginiLegend: Add Subject Remove Subject: Student Number Name of StudentJake ChesterphilÎncă nu există evaluări
- Chemistry Practicals Class 12Document32 paginiChemistry Practicals Class 12Eshan Trivedi40% (5)
- MESCO News January 2016Document4 paginiMESCO News January 2016GoriZakirSalimÎncă nu există evaluări
- Free Spanning Analysis of Offshore PipelinesDocument14 paginiFree Spanning Analysis of Offshore PipelinesMaringan JuliverÎncă nu există evaluări
- Microgels As Model Colloids Adv. Colloid. Interface Sci. 1999 SaundersDocument25 paginiMicrogels As Model Colloids Adv. Colloid. Interface Sci. 1999 SaundersKevin PascualÎncă nu există evaluări
- Prestressed Concrete Structures: Prepared By: Dr. Amlan K. Sengupta Dr. Devdas MenonDocument11 paginiPrestressed Concrete Structures: Prepared By: Dr. Amlan K. Sengupta Dr. Devdas MenonJeffrey Carlo Viduya AgliamÎncă nu există evaluări