S-ar putea să vă placă și
- P, I, D, PI, PD, and PID ControlDocument14 paginiP, I, D, PI, PD, and PID ControlArnav KothiyalÎncă nu există evaluări
- Pid EeeeDocument28 paginiPid Eeeecyprian obotaÎncă nu există evaluări
- Pid ThoryDocument24 paginiPid ThoryPravin KumarÎncă nu există evaluări
- Process Dynamics & Control: Muhammad Rashed JavedDocument30 paginiProcess Dynamics & Control: Muhammad Rashed JavedTalha ImtiazÎncă nu există evaluări
- 9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsDocument9 pagini9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsChandrasekar ElankannanÎncă nu există evaluări
- Dynamic Behavior of Feedback Control ProcessesDocument12 paginiDynamic Behavior of Feedback Control ProcessesAubrenica Lopez100% (1)
- Effect Relationship For TheDocument5 paginiEffect Relationship For TheByron MawoyoÎncă nu există evaluări
- Report ControlDocument33 paginiReport Controlajwadalfatani100% (5)
- CH 4 - Process Control J5800Document49 paginiCH 4 - Process Control J5800mohd_mizanÎncă nu există evaluări
- Automation Process ControlDocument39 paginiAutomation Process Controlaw_ae100% (4)
- Pid Controller Tuning: S.no Name of The ChapterDocument35 paginiPid Controller Tuning: S.no Name of The ChapterAmit TripathiÎncă nu există evaluări
- Control DynamicDocument10 paginiControl Dynamicكرار نعيم100% (1)
- 2023 PCI360S Introductory ConceptsDocument19 pagini2023 PCI360S Introductory ConceptsSifanele PotwanaÎncă nu există evaluări
- Unit 3Document11 paginiUnit 3mayuraher9511Încă nu există evaluări
- Chemical Process Variables-1Document47 paginiChemical Process Variables-1Portia ShilengeÎncă nu există evaluări
- Control StrategyDocument44 paginiControl StrategyAyunie FazlinÎncă nu există evaluări
- IPCDocument15 paginiIPCu can't see meÎncă nu există evaluări
- Exp - P8 - Multiprocess TrainerDocument19 paginiExp - P8 - Multiprocess TrainerSiddesh PatilÎncă nu există evaluări
- Lect 1 Introduction To Process ControlDocument4 paginiLect 1 Introduction To Process ControlZaidoon MohsinÎncă nu există evaluări
- Instrumentation Engineering Questions & AnswersDocument10 paginiInstrumentation Engineering Questions & AnswerscontgautamÎncă nu există evaluări
- PID Controller: Control Loop BasicsDocument6 paginiPID Controller: Control Loop Basicsdil17Încă nu există evaluări
- Bcs (Unit 1)Document23 paginiBcs (Unit 1)sivamani CHINNASWAMYÎncă nu există evaluări
- Exp - P6 - Temperature ControlDocument10 paginiExp - P6 - Temperature ControlSiddesh PatilÎncă nu există evaluări
- Air-Conditioning and Refrigeration Control - 1: Instructor: Eng. Raad Alsaleh Grading SystemDocument92 paginiAir-Conditioning and Refrigeration Control - 1: Instructor: Eng. Raad Alsaleh Grading SystemSunil Varma VeeravalliÎncă nu există evaluări
- Basic Process ControlDocument38 paginiBasic Process ControlBoris bryan AletanuÎncă nu există evaluări
- Types of Controllers: P, I, D, PI, PD, and PID ControllersDocument5 paginiTypes of Controllers: P, I, D, PI, PD, and PID Controllerspratik chakrabortyÎncă nu există evaluări
- Slides CPC PDFDocument536 paginiSlides CPC PDFJam imtiaz100% (1)
- Automatic Controllers & Control ModesDocument74 paginiAutomatic Controllers & Control ModesVishal IyerÎncă nu există evaluări
- Tarea2 Investigacion-Mcca-190090Document13 paginiTarea2 Investigacion-Mcca-190090Christian MendezÎncă nu există evaluări
- Contro EngineeringDocument29 paginiContro EngineeringNor AshimyÎncă nu există evaluări
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocument39 paginiAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaÎncă nu există evaluări
- Ic1352 - Process Control-2 MarksDocument21 paginiIc1352 - Process Control-2 MarksKaushal Kishor100% (1)
- ECNG3004 Control System ApplicationsDocument7 paginiECNG3004 Control System ApplicationsMarlon BoucaudÎncă nu există evaluări
- Why Do We Need Process ControlDocument6 paginiWhy Do We Need Process ControlSebastien PaulÎncă nu există evaluări
- CEIC3006 Lec 1Document5 paginiCEIC3006 Lec 1Holly YuanÎncă nu există evaluări
- Process Control CHP 5Document29 paginiProcess Control CHP 5dododoorÎncă nu există evaluări
- EVMS Full Notes PDFDocument78 paginiEVMS Full Notes PDFNaveen DhanurajÎncă nu există evaluări
- Chapter 5Document39 paginiChapter 5Portia ShilengeÎncă nu există evaluări
- Industrial Process Control Basic ConceptsDocument39 paginiIndustrial Process Control Basic Conceptskaezzar10100% (1)
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 paginiChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanÎncă nu există evaluări
- Controller Principles 2020 NotesDocument17 paginiController Principles 2020 NotesJoseph ChalilÎncă nu există evaluări
- IntroductionDocument39 paginiIntroductionMohd FazliÎncă nu există evaluări
- Hitachi Inverter PID Control Users' GuideDocument16 paginiHitachi Inverter PID Control Users' GuideMirinhaeThiago RosárioÎncă nu există evaluări
- Summary Part MaiDocument8 paginiSummary Part MaiCupa no DensetsuÎncă nu există evaluări
- Process Contrlo PracDocument44 paginiProcess Contrlo PracMvelo PhungulaÎncă nu există evaluări
- Process Control NotesDocument178 paginiProcess Control Notesabdulrhman aljuaydi100% (1)
- A Simple Single-Input-Single-Output (SISO) Feedback Control Loop Consists of FollowingDocument3 paginiA Simple Single-Input-Single-Output (SISO) Feedback Control Loop Consists of FollowingMicahÎncă nu există evaluări
- Control SystemsDocument18 paginiControl Systemsgayatri jaltareÎncă nu există evaluări
- Chap 3Document10 paginiChap 3amol76Încă nu există evaluări
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocument18 paginiExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiÎncă nu există evaluări
- Experiment No 8 IC LabDocument12 paginiExperiment No 8 IC LabAyesha KhurramÎncă nu există evaluări
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 paginiClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARÎncă nu există evaluări
- ChE 220LDocument3 paginiChE 220LSweyn BalidoyÎncă nu există evaluări
- Pressure Control TrainerDocument44 paginiPressure Control TrainerAjeet KumarÎncă nu există evaluări
- Fundamentals of ControlDocument5 paginiFundamentals of Controltoony reyesÎncă nu există evaluări
- Temperature Control LabDocument16 paginiTemperature Control Labhoocheeleong234100% (1)
- Instrumentation and Contrrol PPT LessonDocument41 paginiInstrumentation and Contrrol PPT LessonFRANCK DAMSSSÎncă nu există evaluări
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesDe la EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesÎncă nu există evaluări
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Hot Work PowerpointDocument18 paginiHot Work PowerpointSalim Chohan100% (1)
- F 44736016Document3 paginiF 44736016Salim ChohanÎncă nu există evaluări
- Cre Lecture (07-09-2015)Document27 paginiCre Lecture (07-09-2015)Salim ChohanÎncă nu există evaluări
- Interpretation of Batch Reactor DataDocument4 paginiInterpretation of Batch Reactor DataSalim Chohan0% (1)
- Cre Lecture (07-09-2015)Document27 paginiCre Lecture (07-09-2015)Salim ChohanÎncă nu există evaluări
- Material Selection & Design ConsiderationsDocument21 paginiMaterial Selection & Design ConsiderationsSalim Chohan100% (1)
- Best Practice 12lubricant Selecton For Screw and Recip CompressorsDocument6 paginiBest Practice 12lubricant Selecton For Screw and Recip CompressorsSalim ChohanÎncă nu există evaluări
- 120 PruDocument1 pagină120 PruSalim ChohanÎncă nu există evaluări
- General ConceptsDocument11 paginiGeneral ConceptsSalim ChohanÎncă nu există evaluări
- 106 MeroxDocument1 pagină106 MeroxSalim ChohanÎncă nu există evaluări
- Troubleshootinh 102-103Document2 paginiTroubleshootinh 102-103Salim ChohanÎncă nu există evaluări
- REPORT 102-103 EditorDocument2 paginiREPORT 102-103 EditorSalim ChohanÎncă nu există evaluări
- Schx4004 Mechanical Operations LabDocument23 paginiSchx4004 Mechanical Operations LabsaibapoleÎncă nu există evaluări
- Numericals 19 PDFDocument8 paginiNumericals 19 PDFSalim ChohanÎncă nu există evaluări
- Cre Lecture (07-09-2015)Document27 paginiCre Lecture (07-09-2015)Salim ChohanÎncă nu există evaluări
- Description of Process FlowDocument2 paginiDescription of Process FlowSalim ChohanÎncă nu există evaluări
- Compressors OperationDocument35 paginiCompressors OperationSalim Chohan100% (1)
- Chemical Engineering Progress (1993) Pag. 53-60Document8 paginiChemical Engineering Progress (1993) Pag. 53-60sharkdude1134100% (1)
- Ethylene Oxide PresentationDocument14 paginiEthylene Oxide PresentationSalim Chohan100% (3)
- Chmiionelect 2Document3 paginiChmiionelect 2kjjkimkmkÎncă nu există evaluări
- Evaporation: Difference B/W Evaporation & BoilingDocument35 paginiEvaporation: Difference B/W Evaporation & BoilingSalim ChohanÎncă nu există evaluări
- MS Project TutorialDocument36 paginiMS Project TutorialSalim ChohanÎncă nu există evaluări
- Cre Lecture (07-09-2015)Document27 paginiCre Lecture (07-09-2015)Salim ChohanÎncă nu există evaluări
- CHAPTER 3: PROJECT MANAGEMENT - Suggested Solutions: Question 3.3 Network DrawingDocument3 paginiCHAPTER 3: PROJECT MANAGEMENT - Suggested Solutions: Question 3.3 Network DrawingKoko DandashÎncă nu există evaluări
- Introduction To Human Resource Management: S. Ali Ammar TaqviDocument9 paginiIntroduction To Human Resource Management: S. Ali Ammar TaqviSalim ChohanÎncă nu există evaluări
- ExtrusionDocument11 paginiExtrusionSalim ChohanÎncă nu există evaluări
- PRP ProblemsDocument5 paginiPRP ProblemsSalim ChohanÎncă nu există evaluări
- Poly Vinyl ChlorideDocument13 paginiPoly Vinyl ChlorideSalim ChohanÎncă nu există evaluări
- Pert CPMDocument33 paginiPert CPMSalim Chohan100% (1)
- CavitationDocument11 paginiCavitationSalim Chohan0% (1)
- InFocus Thunder Speakerphone DatasheetDocument2 paginiInFocus Thunder Speakerphone Datasheetpinke01Încă nu există evaluări
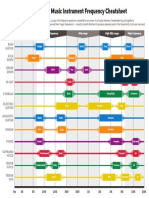
- Music Frequency Cheat SheetDocument1 paginăMusic Frequency Cheat SheetLeonel Molina AlvaradoÎncă nu există evaluări
- Usage of D6T-44L - 8L - 1A Thermal SensorDocument23 paginiUsage of D6T-44L - 8L - 1A Thermal SensorEduardo ggÎncă nu există evaluări
- Stainless Steel Wire Mesh and Wire ClothDocument3 paginiStainless Steel Wire Mesh and Wire ClothStela LjevarÎncă nu există evaluări
- Bailey HangoutsDocument477 paginiBailey Hangoutsmemes MendezÎncă nu există evaluări
- Assignment 3 Submitted by:-YOGESH YADAV ROLL NO. R610215057 SAP ID 500048466Document6 paginiAssignment 3 Submitted by:-YOGESH YADAV ROLL NO. R610215057 SAP ID 500048466Yogesh YadavÎncă nu există evaluări
- 2010 Batch (Sem 1 11-12)Document10 pagini2010 Batch (Sem 1 11-12)prateek_7892Încă nu există evaluări
- Truebluepower: Advanced Lithium-Ion Battery TB17Document2 paginiTruebluepower: Advanced Lithium-Ion Battery TB17Milad YadollahiÎncă nu există evaluări
- Digital Image Correlation - Tracking With MatlabDocument20 paginiDigital Image Correlation - Tracking With MatlabrajibmeÎncă nu există evaluări
- 7) Progress PaymentDocument5 pagini7) Progress Paymentkerwin jayÎncă nu există evaluări
- East West Pipe Rack For Piping Project J-80: Sendan International Company LTDDocument25 paginiEast West Pipe Rack For Piping Project J-80: Sendan International Company LTDFarrukh Javed100% (1)
- Mekaniko On The Go: An Online Mechanic Mobile Application: A System Analysis and Design ProjectDocument8 paginiMekaniko On The Go: An Online Mechanic Mobile Application: A System Analysis and Design ProjectMarco MagdaelÎncă nu există evaluări
- Dr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)Document37 paginiDr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)MohammedSaadaniHassani67% (6)
- Time of Setting of Hydraulic Cement by Vicat NeedleDocument6 paginiTime of Setting of Hydraulic Cement by Vicat NeedleAbdullah TrwanshyÎncă nu există evaluări
- Imp25 PDFDocument8 paginiImp25 PDFEng Marwa ElsherifÎncă nu există evaluări
- OpenSAP Sac1 Week 2 All SlidesDocument17 paginiOpenSAP Sac1 Week 2 All SlidesTheJackÎncă nu există evaluări
- Itw Catalog PDFDocument180 paginiItw Catalog PDFGilbertoÎncă nu există evaluări
- 132-LogSat JRC JLN-720 Instruct Manual 1-10-2019Document134 pagini132-LogSat JRC JLN-720 Instruct Manual 1-10-2019Sunil S I ShippingÎncă nu există evaluări
- Fast-Recovery Rectifier Diodes: Ru 4Y Ru 4Z RU4 Ru 4A Ru 4B Ru 4CDocument1 paginăFast-Recovery Rectifier Diodes: Ru 4Y Ru 4Z RU4 Ru 4A Ru 4B Ru 4CY. Leonel MolinaÎncă nu există evaluări
- Product Data: Convertible Air Handlers 1-1/2 - 5 TonDocument28 paginiProduct Data: Convertible Air Handlers 1-1/2 - 5 TonJonathan CapraÎncă nu există evaluări
- C510WNDocument2 paginiC510WNEdgarDavidDiazCamposÎncă nu există evaluări
- Design of Ms Pipe:: - (40 MM NB, Class'b'Document4 paginiDesign of Ms Pipe:: - (40 MM NB, Class'b'Kancharla Naga Ratna KumarÎncă nu există evaluări
- Job Application and Cover LettersDocument1 paginăJob Application and Cover LettersDyah AgÎncă nu există evaluări
- Brochure Tialoc Chemical Resistant Piping Systems: Page 1 of 20Document20 paginiBrochure Tialoc Chemical Resistant Piping Systems: Page 1 of 20Fernando Cesar PérezÎncă nu există evaluări
- 0764 Kali LinuxDocument322 pagini0764 Kali LinuxAnonymous wlDp7UrBam0% (2)
- Dtu-30 09 2019 PDFDocument15 paginiDtu-30 09 2019 PDFRameo majumderÎncă nu există evaluări
- Case/Duct System (Automobile)Document7 paginiCase/Duct System (Automobile)Tran xuan ThuyÎncă nu există evaluări
- LCD and TV Repair GuideDocument195 paginiLCD and TV Repair GuideUlisesMartin79% (14)
- Unit 5: Extra Practice: KeyDocument1 paginăUnit 5: Extra Practice: KeyMuniz BarbosaÎncă nu există evaluări
- FuzzyDocument75 paginiFuzzyvatsalshah24Încă nu există evaluări