S-ar putea să vă placă și
- Manual ICS200Document61 paginiManual ICS200CRISA3000000100% (1)
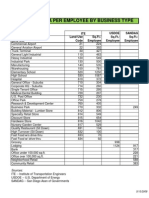
- Building Area Per Employee by Business TypeDocument1 paginăBuilding Area Per Employee by Business TypeDavidFitzpatrick7Încă nu există evaluări
- MiscRealbksongfind2016 (Trascinato)Document1 paginăMiscRealbksongfind2016 (Trascinato)Bbgianni100% (1)
- An Introduction To The Empirical Pseudopotential Method: Download A Mathematica ProgramDocument7 paginiAn Introduction To The Empirical Pseudopotential Method: Download A Mathematica ProgramosmansafaÎncă nu există evaluări
- Berton Braley Songs of The Workaday WorldDocument168 paginiBerton Braley Songs of The Workaday Worldedwrite5470Încă nu există evaluări
- MathieuDocument68 paginiMathieuSandipSarkarÎncă nu există evaluări
- SAR Light Synthetic Aperture Radar: An Introduction ToDocument70 paginiSAR Light Synthetic Aperture Radar: An Introduction ToPagesia CatalanaÎncă nu există evaluări
- OB-E ManualDocument21 paginiOB-E Manual1265musicÎncă nu există evaluări
- Wavelets and Filter BanksDocument4 paginiWavelets and Filter BanksDojima1205Încă nu există evaluări
- Geometry of Quantum Evolution For Mixed Quantum States - Ole Andersson, Hoshang HeydariDocument6 paginiGeometry of Quantum Evolution For Mixed Quantum States - Ole Andersson, Hoshang HeydariCambiador de MundoÎncă nu există evaluări
- AH Revision BookletDocument15 paginiAH Revision BookletMaria SaraivaÎncă nu există evaluări
- New Horizons PDFDocument28 paginiNew Horizons PDFKavooÎncă nu există evaluări
- Period or Movement Characteristics Chief Artists and Major Works Historical Events Literature MusicDocument2 paginiPeriod or Movement Characteristics Chief Artists and Major Works Historical Events Literature Musicsmiley100% (1)
- ImpressionismDocument1 paginăImpressionismSamirAldanaÎncă nu există evaluări
- (1 The Eq of Motion of An Interstellar Bussard Ramjet (Semay 2004Document10 pagini(1 The Eq of Motion of An Interstellar Bussard Ramjet (Semay 2004Lurzizare100% (1)
- 1001 Albums You Must Hear Before You DieDocument22 pagini1001 Albums You Must Hear Before You DieDaniel SalaunÎncă nu există evaluări
- Xenakis Symbolic Music Agon Andreatta Assayas SchaubDocument17 paginiXenakis Symbolic Music Agon Andreatta Assayas SchaubRuben SeroussiÎncă nu există evaluări
- How To Write Pure Data ExternalsDocument39 paginiHow To Write Pure Data ExternalsThe Almighty Sound67% (3)
- Paul Simon: Douglas R. Gilbert/RedfernsDocument3 paginiPaul Simon: Douglas R. Gilbert/Redfernsnilton de amandaÎncă nu există evaluări
- Ebert - A Phenomenological Approach To Artificial Jazz ImprovisationDocument46 paginiEbert - A Phenomenological Approach To Artificial Jazz Improvisationmaebert3952100% (2)
- Andy Klise 3x3x3 Speedcubing Guide v4 PDFDocument2 paginiAndy Klise 3x3x3 Speedcubing Guide v4 PDFmshakanÎncă nu există evaluări
- DiopanteneDocument10 paginiDiopanteneBenjamin Benicarlo Juanillo IIIÎncă nu există evaluări
- Computational Methods For Electromagnetics and MicrowavesDocument98 paginiComputational Methods For Electromagnetics and MicrowavesAli O RezaÎncă nu există evaluări
- Akai S900 ManualDocument28 paginiAkai S900 ManualCookie StrangerÎncă nu există evaluări
- Classical MechanicsDocument3 paginiClassical MechanicsAnkit Dixit0% (1)
- Light ScatteringDocument10 paginiLight ScatteringAndri HanryansyahÎncă nu există evaluări
- Friedman PDFDocument323 paginiFriedman PDFgmrp2000Încă nu există evaluări
- Handbook of The History of General TopologyDocument418 paginiHandbook of The History of General TopologygunyrunÎncă nu există evaluări
- U 2Document37 paginiU 2Pe MorÎncă nu există evaluări
- Varga, R.S. Gersgorin and His Circles. 2004. 3.4MBDocument237 paginiVarga, R.S. Gersgorin and His Circles. 2004. 3.4MBSP RickÎncă nu există evaluări
- Running Cp2K Calculations: Iain BethuneDocument22 paginiRunning Cp2K Calculations: Iain Bethunerajesh.v.v.kÎncă nu există evaluări
- The Elements of Java StyleDocument91 paginiThe Elements of Java StyleDarianÎncă nu există evaluări
- s8 Plus User Manual PDFDocument75 paginis8 Plus User Manual PDFAmorim SilvaÎncă nu există evaluări
- Digital Processing of Synthetic Aperture Radar Data: Algorithms and ImplementationDocument436 paginiDigital Processing of Synthetic Aperture Radar Data: Algorithms and ImplementationTestÎncă nu există evaluări
- Mathematical Typesetting With LATEXDocument221 paginiMathematical Typesetting With LATEXThiarly100% (1)
- Intro To TensorsDocument22 paginiIntro To TensorsSumeet KhatriÎncă nu există evaluări
- Henzler - 2010 - Time-To-Digital Converters PDFDocument132 paginiHenzler - 2010 - Time-To-Digital Converters PDFmimitech mimitechÎncă nu există evaluări
- Opcode Vision and Opcode Studio Vision 4.5 MIDI Reference Manual 1999Document499 paginiOpcode Vision and Opcode Studio Vision 4.5 MIDI Reference Manual 1999nifnifnafnafÎncă nu există evaluări
- The Chord Cookbook Compendium © 2008 Matthieu BrandtDocument1 paginăThe Chord Cookbook Compendium © 2008 Matthieu BrandtisaacalcÎncă nu există evaluări
- PIII - Theoretical Physics of Soft Condensed Matter - Chua, Cates (2018) 70pg PDFDocument70 paginiPIII - Theoretical Physics of Soft Condensed Matter - Chua, Cates (2018) 70pg PDFfdsdsfsdfmgÎncă nu există evaluări
- Maya Bifrost Overview SheetDocument3 paginiMaya Bifrost Overview SheetGidion SinagaÎncă nu există evaluări
- Differential - Equations.and - Control.theory - Ebook EEnDocument334 paginiDifferential - Equations.and - Control.theory - Ebook EEnmetkmyÎncă nu există evaluări
- Cloudlab 200t Reference ManualDocument21 paginiCloudlab 200t Reference ManualMiguelAngelBustamanteBumi100% (1)
- Christoffel Symbols: PHYS 471: Introduction To Relativity and CosmologyDocument9 paginiChristoffel Symbols: PHYS 471: Introduction To Relativity and Cosmologyarileo3100% (1)
- 052176727X AstronomDocument504 pagini052176727X AstronomCcneneÎncă nu există evaluări
- Mathematics As A Creative ArtDocument11 paginiMathematics As A Creative ArtAaliyahÎncă nu există evaluări
- AV Control Receiver: Operating InstructionsDocument32 paginiAV Control Receiver: Operating InstructionsCuthbert Marshall100% (1)
- A Program For Interstellar ExplorationDocument17 paginiA Program For Interstellar Explorationaeronaughty007100% (1)
- Math in MusicDocument12 paginiMath in MusicHrvoje AndrošÎncă nu există evaluări
- MRI Pulse Sequences: Freddy Haryanto Program Pendidikan Dokter Spesialis Radiologi - UNPADDocument37 paginiMRI Pulse Sequences: Freddy Haryanto Program Pendidikan Dokter Spesialis Radiologi - UNPADAnthoÎncă nu există evaluări
- Egyptian Danza Duo Guitar Bass by Al Di MeolaDocument9 paginiEgyptian Danza Duo Guitar Bass by Al Di MeolasaltsenkÎncă nu există evaluări
- Flanders@Swann LyricsDocument19 paginiFlanders@Swann LyricszeldavidÎncă nu există evaluări
- Korotayev Introduction To Social Macrodynamics Volume 1 Full PDFDocument129 paginiKorotayev Introduction To Social Macrodynamics Volume 1 Full PDFAntonio Del NegroÎncă nu există evaluări
- The Three-Body ProblemDocument69 paginiThe Three-Body ProblemCamila LondoñoÎncă nu există evaluări
- Haskell Programming 0.12.0 Ereader PDFDocument1.879 paginiHaskell Programming 0.12.0 Ereader PDFName100% (1)
- Autofocus Correction of Excessive Migration in Synthetic Aperture Radar ImagesDocument28 paginiAutofocus Correction of Excessive Migration in Synthetic Aperture Radar Imagessandia_docsÎncă nu există evaluări
- SAR Backprojection BishopDocument59 paginiSAR Backprojection BishopDenis CarlosÎncă nu există evaluări
- Characterization of A Track-and-Hold Amplifier For Application To A High Performance SARDocument57 paginiCharacterization of A Track-and-Hold Amplifier For Application To A High Performance SARsandia_docsÎncă nu există evaluări
- Superresolution and Synthetic Aperture Radar: Sandia ReportDocument54 paginiSuperresolution and Synthetic Aperture Radar: Sandia ReportEkram MokhtarÎncă nu există evaluări
- SAR Window Functions: A Review and Analysis of The Notched Spectrum ProblemDocument54 paginiSAR Window Functions: A Review and Analysis of The Notched Spectrum Problemsandia_docsÎncă nu există evaluări
- Fundamentals of Signal Processing For Phased Array Radar: Dr. Ulrich NickelDocument22 paginiFundamentals of Signal Processing For Phased Array Radar: Dr. Ulrich Nickelnaivedya_mishraÎncă nu există evaluări
- Introduction To Synthetic Aperture Sonar PDFDocument27 paginiIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraÎncă nu există evaluări
- Citi GPS Studie Car of The Future 4Document152 paginiCiti GPS Studie Car of The Future 4naivedya_mishraÎncă nu există evaluări
- Citi GPS Studie Car of The Future 4Document152 paginiCiti GPS Studie Car of The Future 4naivedya_mishraÎncă nu există evaluări
- Matlab Codes - ReadmeDocument1 paginăMatlab Codes - Readmenaivedya_mishraÎncă nu există evaluări
- Arcnet IeteDocument3 paginiArcnet Ietenaivedya_mishraÎncă nu există evaluări
- Image Warping: Prof. Eric Miller Elmiller@ece - Tufts.eduDocument14 paginiImage Warping: Prof. Eric Miller Elmiller@ece - Tufts.edunaivedya_mishraÎncă nu există evaluări
- Downward ContinuationDocument20 paginiDownward Continuationnaivedya_mishraÎncă nu există evaluări
- GPR ProcessingDocument23 paginiGPR Processingnaivedya_mishraÎncă nu există evaluări
- Eccm in RadarsDocument89 paginiEccm in Radarsnaivedya_mishraÎncă nu există evaluări
- SarDocument68 paginiSarTaruna AggarwalÎncă nu există evaluări
- SARDocument204 paginiSARArash MazandaraniÎncă nu există evaluări
- Introduction To Synthetic Aperture Sonar PDFDocument27 paginiIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraÎncă nu există evaluări
- Seismic MigrationDocument77 paginiSeismic Migrationnaivedya_mishra100% (2)
- Spatial FrequencyDocument4 paginiSpatial Frequencynaivedya_mishraÎncă nu există evaluări
- Radar EquationDocument3 paginiRadar Equationnaivedya_mishraÎncă nu există evaluări
- SARDocument204 paginiSARArash MazandaraniÎncă nu există evaluări
- MATLAB BASED SPECAN AlgorithmDocument91 paginiMATLAB BASED SPECAN Algorithmnaivedya_mishra0% (1)
- Sar SummaryDocument14 paginiSar Summarynaivedya_mishraÎncă nu există evaluări
- Scientific SAR UserguideDocument57 paginiScientific SAR Userguidenaivedya_mishraÎncă nu există evaluări
- Matlab User GuideDocument62 paginiMatlab User GuidedheerajnehruÎncă nu există evaluări
- Time Domain Back Projection Algorithms For SARDocument4 paginiTime Domain Back Projection Algorithms For SARnaivedya_mishraÎncă nu există evaluări
- Electromagnetic Field Measurement Instruments: SurveyDocument15 paginiElectromagnetic Field Measurement Instruments: SurveyJaeshinÎncă nu există evaluări
- Irepeater Install Manual2Document2 paginiIrepeater Install Manual2Vivek JhaÎncă nu există evaluări
- Design and Implementation of FIR Filter Based On Dual Quality Compressor Based Multipliers With MFADocument24 paginiDesign and Implementation of FIR Filter Based On Dual Quality Compressor Based Multipliers With MFAKushal MalhotraÎncă nu există evaluări
- Specifications Sheet Ectane 2Document4 paginiSpecifications Sheet Ectane 2Alejandro Lopez100% (1)
- PLL Design With MATLAB and SimulinkDocument2 paginiPLL Design With MATLAB and Simulinkbkgp1994Încă nu există evaluări
- LoRaWAN at A GlanceDocument5 paginiLoRaWAN at A GlancenieyaazbÎncă nu există evaluări
- Signal Processing First: Lecture #1 SinusoidsDocument19 paginiSignal Processing First: Lecture #1 SinusoidstasneemÎncă nu există evaluări
- Data Sheet USB Gateway USB 300 / USB 300U / USB 400JDocument1 paginăData Sheet USB Gateway USB 300 / USB 300U / USB 400JMihai MisaÎncă nu există evaluări
- MMC Unit 4Document30 paginiMMC Unit 4nandini pÎncă nu există evaluări
- Modeling The Impact of PCB Traces On The Performance of An RF Amplifier in An ASIC With The Help of CST-Studio Full Field EM Simulations and Cadence Virtuoso Co-SimulationsDocument18 paginiModeling The Impact of PCB Traces On The Performance of An RF Amplifier in An ASIC With The Help of CST-Studio Full Field EM Simulations and Cadence Virtuoso Co-SimulationsHarman MalhotraÎncă nu există evaluări
- Oscillator Resonator Design Tutorial: 1 AbstractDocument20 paginiOscillator Resonator Design Tutorial: 1 Abstractmelvin45Încă nu există evaluări
- Kearneys MixerDocument27 paginiKearneys MixerZack DagobaÎncă nu există evaluări
- 3G and 4G Wireless - Advances and Challenges: 1 SRB 041406 Ver1Document72 pagini3G and 4G Wireless - Advances and Challenges: 1 SRB 041406 Ver1Ashish Ben AjayÎncă nu există evaluări
- Comutel PDF 4fb2ce402d787Document2 paginiComutel PDF 4fb2ce402d787Marco Antonio Oruna LaraÎncă nu există evaluări
- Block Diagram of Communication SystemDocument3 paginiBlock Diagram of Communication SystemKiranKumarÎncă nu există evaluări
- CL1060A ManualDocument9 paginiCL1060A Manualtito983Încă nu există evaluări
- 1AT3 Microwave Communications and Satellite CommunicationsDocument1 pagină1AT3 Microwave Communications and Satellite CommunicationsNicholson ZapantaÎncă nu există evaluări
- AplctnDocument8 paginiAplctnNoble BrightÎncă nu există evaluări
- 4.the Physical LayerDocument99 pagini4.the Physical LayerPratham KanadeÎncă nu există evaluări
- A Novel Analog Broadband RF Predistortion Circuit in Directly Modulated Lasers For Radio-Over-Fiber SystemsDocument4 paginiA Novel Analog Broadband RF Predistortion Circuit in Directly Modulated Lasers For Radio-Over-Fiber SystemsjoseÎncă nu există evaluări
- Network Theory Question BankDocument14 paginiNetwork Theory Question BankHarishReddyÎncă nu există evaluări
- Practical Electronics 1966 04 S OCR PDFDocument84 paginiPractical Electronics 1966 04 S OCR PDFCarlos SoaresÎncă nu există evaluări
- Ethernet Networking Tutorial PDFDocument2 paginiEthernet Networking Tutorial PDFKariÎncă nu există evaluări
- Synthesis of Wavelet Filters Using WaveletDocument4 paginiSynthesis of Wavelet Filters Using WaveletWajdi BELLILÎncă nu există evaluări
- Global System For Mobile Communications (GSM) : Asad AliDocument66 paginiGlobal System For Mobile Communications (GSM) : Asad AliMuhammadwaqasnaseemÎncă nu există evaluări
- Gazi University: 081110056 Mehmet Emre SemerciDocument12 paginiGazi University: 081110056 Mehmet Emre SemerciemreÎncă nu există evaluări
- ALCATEL A9100 Base Station Product DescriptionDocument83 paginiALCATEL A9100 Base Station Product DescriptionngsytienÎncă nu există evaluări
- Future-Oriented Indoor MBB SolutionDocument6 paginiFuture-Oriented Indoor MBB SolutionIBS ConsultantÎncă nu există evaluări
- 06 - 4G - Parameter - Power Control PDFDocument54 pagini06 - 4G - Parameter - Power Control PDFYandra Jeneldi0% (1)