S-ar putea să vă placă și
- Numerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannDocument2 paginiNumerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannMahmoud El-MahdyÎncă nu există evaluări
- 2 - Lecture II - Law and EthicsDocument43 pagini2 - Lecture II - Law and EthicsMahmoud El-MahdyÎncă nu există evaluări
- 4 - Lecture IV (Tort Law) PDFDocument18 pagini4 - Lecture IV (Tort Law) PDFMahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: 1.0.1 Newton's MethodDocument20 paginiRoots of Equations: 1.0.1 Newton's MethodMahmoud El-MahdyÎncă nu există evaluări
- Lecture 011Document58 paginiLecture 011Mahmoud El-MahdyÎncă nu există evaluări
- 1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFDocument18 pagini1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFMahmoud El-MahdyÎncă nu există evaluări
- Control Lect1Document12 paginiControl Lect1Mahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: K K K + K K K + K KDocument17 paginiRoots of Equations: K K K + K K K + K KMahmoud El-MahdyÎncă nu există evaluări
- Final Revision Part2Document8 paginiFinal Revision Part2Mahmoud El-MahdyÎncă nu există evaluări
- Final Revision Part1Document12 paginiFinal Revision Part1Mahmoud El-MahdyÎncă nu există evaluări
- Orthogonal Polynomials Extra ProblemsDocument6 paginiOrthogonal Polynomials Extra ProblemsMahmoud El-MahdyÎncă nu există evaluări
- Lecture 008Document15 paginiLecture 008Mahmoud El-MahdyÎncă nu există evaluări
- Tcs 230Document10 paginiTcs 230MuseByKeaneÎncă nu există evaluări
- IM Part-1Document14 paginiIM Part-1Mahmoud El-MahdyÎncă nu există evaluări
- 1.1 Gaussian Numerical Integration ContinuedDocument33 pagini1.1 Gaussian Numerical Integration ContinuedMahmoud El-MahdyÎncă nu există evaluări
- Metal Detector-Project ReportDocument26 paginiMetal Detector-Project ReportTimK77% (52)
- Lect 2Document25 paginiLect 2Mahmoud El-MahdyÎncă nu există evaluări
- DC Part 2Document29 paginiDC Part 2Mahmoud El-Mahdy100% (1)
- Lecture 005Document17 paginiLecture 005Mahmoud El-MahdyÎncă nu există evaluări
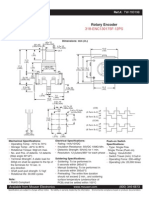
- Rotary EncoderDocument1 paginăRotary EncoderMahmoud El-MahdyÎncă nu există evaluări
- HMC5843Document19 paginiHMC5843Cihat Sami GüngörÎncă nu există evaluări
- DC Part 1-1Document19 paginiDC Part 1-1Mahmoud El-Mahdy100% (1)
- Lecture 009Document23 paginiLecture 009Mahmoud El-MahdyÎncă nu există evaluări
- Paper70 ICARA2004 401 407Document7 paginiPaper70 ICARA2004 401 407Mahmoud El-MahdyÎncă nu există evaluări
- Polynomial Approximation by Least Squares: Distance in A Vector SpaceDocument6 paginiPolynomial Approximation by Least Squares: Distance in A Vector SpaceMahmoud El-MahdyÎncă nu există evaluări
- 10 1 1 116 1392Document142 pagini10 1 1 116 1392Mahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: K K K + K K K + K KDocument17 paginiRoots of Equations: K K K + K K K + K KMahmoud El-MahdyÎncă nu există evaluări
- Technical Report - Circuits (Fall 2007)Document5 paginiTechnical Report - Circuits (Fall 2007)Mahmoud El-MahdyÎncă nu există evaluări
- Paper70 ICARA2004 401 407Document7 paginiPaper70 ICARA2004 401 407Mahmoud El-MahdyÎncă nu există evaluări
- May 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingDocument8 paginiMay 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingMahmoud El-MahdyÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- LESSON PLAN GRAPH OF POLYNOMIAL FUNCTION (Recovered)Document6 paginiLESSON PLAN GRAPH OF POLYNOMIAL FUNCTION (Recovered)Jolina Bagwisa LptÎncă nu există evaluări
- Analysis of Road FurnitureDocument37 paginiAnalysis of Road FurnitureEr navneet jassiÎncă nu există evaluări
- Oral Presentation TN3Document2 paginiOral Presentation TN3Jhon Jairo ObandoÎncă nu există evaluări
- 110id0625 18 PDFDocument40 pagini110id0625 18 PDFPatel RonakÎncă nu există evaluări
- PANASONIC MD2 and E3D Chassis Technical GuideDocument108 paginiPANASONIC MD2 and E3D Chassis Technical GuideavrelecÎncă nu există evaluări
- Factors Affecting Student AchievementDocument15 paginiFactors Affecting Student Achievementhayatudin jusufÎncă nu există evaluări
- Digital Education Propoal by Samriti EducareDocument11 paginiDigital Education Propoal by Samriti EducareshrutiÎncă nu există evaluări
- Martha Crampton Guided Imagery PDFDocument75 paginiMartha Crampton Guided Imagery PDFamimaimiuta100% (3)
- Caracterización Y Zonificación Edáfica Y Climática de La Región de Coquimbo, ChileDocument23 paginiCaracterización Y Zonificación Edáfica Y Climática de La Región de Coquimbo, ChileSantos DamasÎncă nu există evaluări
- Kèm File Nghe: Kỳ Thi Chọn Học Sinh Giỏi Lớp 9Document9 paginiKèm File Nghe: Kỳ Thi Chọn Học Sinh Giỏi Lớp 9Anh LanÎncă nu există evaluări
- MODBUS Connection C5 enDocument20 paginiMODBUS Connection C5 enLanderÎncă nu există evaluări
- Physics EssayDocument5 paginiPhysics Essayapi-423656794Încă nu există evaluări
- 01 Book01Document105 pagini01 Book01Rahul Aryan100% (8)
- Open Clinica Installation ProcessDocument16 paginiOpen Clinica Installation ProcessvijaybhaskarsettyÎncă nu există evaluări
- Incompletion Log in SDDocument7 paginiIncompletion Log in SDRamesh BalajiÎncă nu există evaluări
- Evermotion Archinteriors Vol 14 PDFDocument2 paginiEvermotion Archinteriors Vol 14 PDFCharlesÎncă nu există evaluări
- Computer Abbreviations in PDFDocument4 paginiComputer Abbreviations in PDFSaagar MukhopadhyayÎncă nu există evaluări
- Archana PriyadarshiniDocument7 paginiArchana PriyadarshiniJagriti KumariÎncă nu există evaluări
- Unit 4: Benefit EstimationDocument12 paginiUnit 4: Benefit EstimationRaj ChavanÎncă nu există evaluări
- Manual TelescopioDocument126 paginiManual Telescopioslanka279099Încă nu există evaluări
- ICap Manual - Oct 2012Document20 paginiICap Manual - Oct 2012ecocadecÎncă nu există evaluări
- Usability Engineering NotesDocument10 paginiUsability Engineering NotesSunny ShahÎncă nu există evaluări
- Marikina Polytechnic College FS student classroom observationDocument2 paginiMarikina Polytechnic College FS student classroom observationCindy GeronaÎncă nu există evaluări
- Instabilities, Chaos, and Turbulence - Manneville PDFDocument406 paginiInstabilities, Chaos, and Turbulence - Manneville PDFFinalDanishÎncă nu există evaluări
- Tips For Attempting The Question On Poster Making: Issuing Authority: Title: A Sketch: Date, Time and VenueDocument6 paginiTips For Attempting The Question On Poster Making: Issuing Authority: Title: A Sketch: Date, Time and VenueBibha KumariÎncă nu există evaluări
- Vpci PMC NCR 0026 PDFDocument51 paginiVpci PMC NCR 0026 PDFDarrel Espino AranasÎncă nu există evaluări
- Chem MagicDocument2 paginiChem MagicMark John DumaslanÎncă nu există evaluări
- Module 2Document9 paginiModule 2Uday Prakash SahuÎncă nu există evaluări
- Ats 2 (Csir Net) PDFDocument17 paginiAts 2 (Csir Net) PDFAayushi VermaÎncă nu există evaluări
- Week 01 - Introduction To Project ManagementDocument82 paginiWeek 01 - Introduction To Project ManagementtaribÎncă nu există evaluări