S-ar putea să vă placă și
- The Diary of Anne Frank PacketDocument24 paginiThe Diary of Anne Frank Packetcnakazaki1957Încă nu există evaluări
- RA For Installation & Dismantling of Loading Platform A69Document15 paginiRA For Installation & Dismantling of Loading Platform A69Sajid ShahÎncă nu există evaluări
- Metal Detector-Project ReportDocument26 paginiMetal Detector-Project ReportTimK77% (52)
- Canterburytales-No Fear PrologueDocument10 paginiCanterburytales-No Fear Prologueapi-261452312Încă nu există evaluări
- History of English Prose PDFDocument21 paginiHistory of English Prose PDFMeisyita QothrunnadaÎncă nu există evaluări
- Science Web 2014Document40 paginiScience Web 2014Saif Shahriar0% (1)
- Design of Self - Supporting Dome RoofsDocument6 paginiDesign of Self - Supporting Dome RoofszatenneÎncă nu există evaluări
- Symbolic InteractionismDocument8 paginiSymbolic InteractionismNice tuazonÎncă nu există evaluări
- Modeling and Position Control of Mobile RobotDocument6 paginiModeling and Position Control of Mobile RobotAmin EslamiÎncă nu există evaluări
- Biped Landing Pattern Modification Method With Nonlinear Compliance ControlDocument6 paginiBiped Landing Pattern Modification Method With Nonlinear Compliance ControlHaider NeamaÎncă nu există evaluări
- Path Planning Using Dynamic Vehicle Model: NavigationDocument6 paginiPath Planning Using Dynamic Vehicle Model: NavigationMorpheus_spÎncă nu există evaluări
- Moosavian2008 SlipDocument6 paginiMoosavian2008 SlipElias GarcíaÎncă nu există evaluări
- Attitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresDocument7 paginiAttitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresJoseph WoodruffÎncă nu există evaluări
- Quadruped Robot Stable Trot Over Uneven TerrainsDocument19 paginiQuadruped Robot Stable Trot Over Uneven TerrainsDominicÎncă nu există evaluări
- Zero Moment Point: Frederik FixDocument19 paginiZero Moment Point: Frederik Fixderfred3000Încă nu există evaluări
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 paginiA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgeÎncă nu există evaluări
- Robot Localization Using Relative and Absolute Position EstimatesDocument7 paginiRobot Localization Using Relative and Absolute Position Estimatesengineer86Încă nu există evaluări
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 paginiCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanÎncă nu există evaluări
- Tracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorDocument7 paginiTracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorViet Nguyen TrungÎncă nu există evaluări
- Robot Singularities ExplainedDocument5 paginiRobot Singularities ExplainedTirumalarao KandulaÎncă nu există evaluări
- Methodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemDocument6 paginiMethodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemmaxamaxaÎncă nu există evaluări
- Mapping Contoured Terrain - A Comparison of SLAM Algorithms For RAdioControlled HelicoptersDocument32 paginiMapping Contoured Terrain - A Comparison of SLAM Algorithms For RAdioControlled HelicoptersGeoFurrielÎncă nu există evaluări
- Wheeled Robot For Geophysical SurveyDocument6 paginiWheeled Robot For Geophysical SurveyMili MeriÎncă nu există evaluări
- Obstacle Detection Progress for UGVsDocument14 paginiObstacle Detection Progress for UGVsPrasenjit SahaÎncă nu există evaluări
- Optimal Motion Generation of The Bipedal Under-Actuated Planar Robot For Stair ClimbingDocument4 paginiOptimal Motion Generation of The Bipedal Under-Actuated Planar Robot For Stair Climbingrf.amiri76Încă nu există evaluări
- Path Tracking For A Miniature RobotDocument9 paginiPath Tracking For A Miniature RobotDarshan Rai KanungoÎncă nu există evaluări
- Position Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotDocument6 paginiPosition Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotVictorSÎncă nu există evaluări
- Robotics Kinematics Dynamics and Applications FinalDocument13 paginiRobotics Kinematics Dynamics and Applications FinalJeff AtuaÎncă nu există evaluări
- Control of A Manipulator Mounted On An Independent Controlled Moving PlatformDocument4 paginiControl of A Manipulator Mounted On An Independent Controlled Moving Platformmb.farooqui02Încă nu există evaluări
- NIPS 1995 Improving Elevator Performance Using Reinforcement Learning PaperDocument7 paginiNIPS 1995 Improving Elevator Performance Using Reinforcement Learning PaperlianguoÎncă nu există evaluări
- An Occupancy Grid Based SLAM Method: Ozan Özışık, Sırma YavuzDocument3 paginiAn Occupancy Grid Based SLAM Method: Ozan Özışık, Sırma Yavuzdogukan duranÎncă nu există evaluări
- Potential Field Methods and Their Inherent Limitations For Mobile Robot NavigationDocument10 paginiPotential Field Methods and Their Inherent Limitations For Mobile Robot NavigationViet Nguyen TrungÎncă nu există evaluări
- Feedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotDocument19 paginiFeedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotAnonymous lVQ83F8mCÎncă nu există evaluări
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDocument6 paginiSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaÎncă nu există evaluări
- Eru 2010 SLAM PaperDocument3 paginiEru 2010 SLAM PaperHasala DharmawardenaÎncă nu există evaluări
- Position Control of a Mobile Robot Through PID ConDocument7 paginiPosition Control of a Mobile Robot Through PID ConTuan Anh HoangÎncă nu există evaluări
- Tracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe FrankeDocument8 paginiTracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe Frankeshisasane2Încă nu există evaluări
- Akty StrzelisteDocument4 paginiAkty StrzelisteBetlejemÎncă nu există evaluări
- Swing and Locomotion Control For A Two-Link Brachiation RobotDocument8 paginiSwing and Locomotion Control For A Two-Link Brachiation RobotMiriam LupercioÎncă nu există evaluări
- IROS 2012 Particle Filtering for Maize Field Robot NavigationDocument5 paginiIROS 2012 Particle Filtering for Maize Field Robot NavigationjfrasconÎncă nu există evaluări
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 paginiA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzÎncă nu există evaluări
- Hexapodo IkDocument14 paginiHexapodo IkNico RomÎncă nu există evaluări
- Experimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsDocument6 paginiExperimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsdhineshpÎncă nu există evaluări
- NI Tutorial 10703 enDocument7 paginiNI Tutorial 10703 enthulinh12a1Încă nu există evaluări
- Equiangular Navigation Guidance of A Wheeled Mobile Robot With Local Obstacle AvoidanceDocument6 paginiEquiangular Navigation Guidance of A Wheeled Mobile Robot With Local Obstacle Avoidancearyan_iustÎncă nu există evaluări
- 2004 04 Spe Iag DubDocument12 pagini2004 04 Spe Iag DubLuis VelascoÎncă nu există evaluări
- NavigationDocument17 paginiNavigationQuan NguyenÎncă nu există evaluări
- Vidal Etal Icra2006Document7 paginiVidal Etal Icra2006madupiz@gmailÎncă nu există evaluări
- Jun 1999 277 PDFDocument8 paginiJun 1999 277 PDFbbscribedÎncă nu există evaluări
- 3 Nejad Et Al-LibreDocument10 pagini3 Nejad Et Al-LibreEsthi KusumaÎncă nu există evaluări
- AI in The Game DevelopmentDocument5 paginiAI in The Game DevelopmentInternational Journal of Engineering Inventions (IJEI)Încă nu există evaluări
- Qualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEDocument6 paginiQualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEJulierme SilvaÎncă nu există evaluări
- Optimalisasi Ukuran Manipulabilitas Robot Stanford Menggunakan Metode Pseudo-InverseDocument7 paginiOptimalisasi Ukuran Manipulabilitas Robot Stanford Menggunakan Metode Pseudo-InverseItaAdiutamiÎncă nu există evaluări
- Metric Position and Velocity Estimation for Vision-Inertial SystemsDocument7 paginiMetric Position and Velocity Estimation for Vision-Inertial SystemsVũ Tiến DũngÎncă nu există evaluări
- DCM Orientation Matrix IMU TheoryDocument30 paginiDCM Orientation Matrix IMU Theoryasso2412Încă nu există evaluări
- Lecture 5Document15 paginiLecture 5N MÎncă nu există evaluări
- Direction Cosine MatrixDocument30 paginiDirection Cosine MatrixsazradÎncă nu există evaluări
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 paginiPID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantÎncă nu există evaluări
- Mobile robot kinematics and localizationDocument4 paginiMobile robot kinematics and localizationLediana BrahimiÎncă nu există evaluări
- UNIT 4 MOTION (Alumnos)Document5 paginiUNIT 4 MOTION (Alumnos)Carmen MolinaÎncă nu există evaluări
- LSPB Trajectory Planning Design For The ModularDocument4 paginiLSPB Trajectory Planning Design For The ModularbasantsahuÎncă nu există evaluări
- Connected Crawler Robot - Design and Motion Planning For Climbing A StepDocument15 paginiConnected Crawler Robot - Design and Motion Planning For Climbing A Stepsunil1237Încă nu există evaluări
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDocument7 paginiLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniÎncă nu există evaluări
- Accurate and Stable Mobile Robot Path Tracking Algorithm: An Integrated Solution For Off-Road and High Speed ContextDocument7 paginiAccurate and Stable Mobile Robot Path Tracking Algorithm: An Integrated Solution For Off-Road and High Speed ContextChu DucÎncă nu există evaluări
- Constant Kinetic Energy Robot Trajectory PlanningDocument16 paginiConstant Kinetic Energy Robot Trajectory PlanningstaktikaÎncă nu există evaluări
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlDe la EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlÎncă nu există evaluări
- Numerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannDocument2 paginiNumerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannMahmoud El-MahdyÎncă nu există evaluări
- 2 - Lecture II - Law and EthicsDocument43 pagini2 - Lecture II - Law and EthicsMahmoud El-MahdyÎncă nu există evaluări
- Orthogonal Polynomials Extra ProblemsDocument6 paginiOrthogonal Polynomials Extra ProblemsMahmoud El-MahdyÎncă nu există evaluări
- Lecture 008Document15 paginiLecture 008Mahmoud El-MahdyÎncă nu există evaluări
- 1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFDocument18 pagini1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFMahmoud El-MahdyÎncă nu există evaluări
- 1.1 Gaussian Numerical Integration ContinuedDocument33 pagini1.1 Gaussian Numerical Integration ContinuedMahmoud El-MahdyÎncă nu există evaluări
- Final Revision Part2Document8 paginiFinal Revision Part2Mahmoud El-MahdyÎncă nu există evaluări
- 4 - Lecture IV (Tort Law) PDFDocument18 pagini4 - Lecture IV (Tort Law) PDFMahmoud El-MahdyÎncă nu există evaluări
- Control Lect1Document12 paginiControl Lect1Mahmoud El-MahdyÎncă nu există evaluări
- Final Revision Part1Document12 paginiFinal Revision Part1Mahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: 1.0.1 Newton's MethodDocument20 paginiRoots of Equations: 1.0.1 Newton's MethodMahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: K K K + K K K + K KDocument17 paginiRoots of Equations: K K K + K K K + K KMahmoud El-MahdyÎncă nu există evaluări
- Lect 2Document25 paginiLect 2Mahmoud El-MahdyÎncă nu există evaluări
- Lecture 011Document58 paginiLecture 011Mahmoud El-MahdyÎncă nu există evaluări
- DC Part 1-1Document19 paginiDC Part 1-1Mahmoud El-Mahdy100% (1)
- DC Part 2Document29 paginiDC Part 2Mahmoud El-Mahdy100% (1)
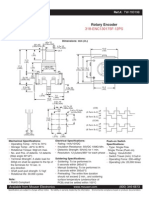
- Rotary EncoderDocument1 paginăRotary EncoderMahmoud El-MahdyÎncă nu există evaluări
- IM Part-1Document14 paginiIM Part-1Mahmoud El-MahdyÎncă nu există evaluări
- Tcs 230Document10 paginiTcs 230MuseByKeaneÎncă nu există evaluări
- HMC5843Document19 paginiHMC5843Cihat Sami GüngörÎncă nu există evaluări
- Lecture 005Document17 paginiLecture 005Mahmoud El-MahdyÎncă nu există evaluări
- Lecture 009Document23 paginiLecture 009Mahmoud El-MahdyÎncă nu există evaluări
- Polynomial Approximation by Least Squares: Distance in A Vector SpaceDocument6 paginiPolynomial Approximation by Least Squares: Distance in A Vector SpaceMahmoud El-MahdyÎncă nu există evaluări
- Paper70 ICARA2004 401 407Document7 paginiPaper70 ICARA2004 401 407Mahmoud El-MahdyÎncă nu există evaluări
- Technical Report - Circuits (Fall 2007)Document5 paginiTechnical Report - Circuits (Fall 2007)Mahmoud El-MahdyÎncă nu există evaluări
- Roots of Equations: K K K + K K K + K KDocument17 paginiRoots of Equations: K K K + K K K + K KMahmoud El-MahdyÎncă nu există evaluări
- Paper70 ICARA2004 401 407Document7 paginiPaper70 ICARA2004 401 407Mahmoud El-MahdyÎncă nu există evaluări
- 10 1 1 116 1392Document142 pagini10 1 1 116 1392Mahmoud El-MahdyÎncă nu există evaluări
- Frequently Asked Questions: Wiring RulesDocument21 paginiFrequently Asked Questions: Wiring RulesRashdan HarunÎncă nu există evaluări
- ComputerDocument26 paginiComputer29.Kritika SinghÎncă nu există evaluări
- Manual EDocument12 paginiManual EKrum KashavarovÎncă nu există evaluări
- Health Optimizing Physical Education: Learning Activity Sheet (LAS) Quarter 4Document7 paginiHealth Optimizing Physical Education: Learning Activity Sheet (LAS) Quarter 4John Wilfred PegranÎncă nu există evaluări
- Re: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesDocument1 paginăRe: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesMayada OsmanÎncă nu există evaluări
- IntuitionDocument10 paginiIntuitionmailsonÎncă nu există evaluări
- Journal 082013Document100 paginiJournal 082013Javier Farias Vera100% (1)
- Anatomy 090819Document30 paginiAnatomy 090819Vaishnavi GourabathiniÎncă nu există evaluări
- Handout CalmAlphaDocument2 paginiHandout CalmAlphaDave SnowdenÎncă nu există evaluări
- Active Disturbance Rejection Control For Nonlinear SystemsDocument8 paginiActive Disturbance Rejection Control For Nonlinear SystemsTrần Việt CườngÎncă nu există evaluări
- Assignment 2Document4 paginiAssignment 2maxamed0% (1)
- China Sichuan Province Se'Ergu Hydro Power Project PDD 20080821Document50 paginiChina Sichuan Province Se'Ergu Hydro Power Project PDD 20080821akhilkuwarÎncă nu există evaluări
- SAP SD Course Content PDFDocument4 paginiSAP SD Course Content PDFshuku03Încă nu există evaluări
- Asian Studies For Filipinos The Philippines in The Asian CenturyDocument15 paginiAsian Studies For Filipinos The Philippines in The Asian CenturyGlaizza QuintonÎncă nu există evaluări
- Lazo v. Judge TiongDocument9 paginiLazo v. Judge TiongKing BadongÎncă nu există evaluări
- Canna DispensariesDocument35 paginiCanna DispensariesWaf Etano100% (1)
- Symasym BBDocument37 paginiSymasym BBChandraRizkyÎncă nu există evaluări
- Alfa Romeo Giulia Range and Quadrifoglio PricelistDocument15 paginiAlfa Romeo Giulia Range and Quadrifoglio PricelistdanielÎncă nu există evaluări
- T Cells & Autoimmunity, s3Document21 paginiT Cells & Autoimmunity, s3LiaAriestaÎncă nu există evaluări
- GuideDocument2 paginiGuideMaissyÎncă nu există evaluări
- Assessment in Southeast AsiaDocument17 paginiAssessment in Southeast AsiathuckhuyaÎncă nu există evaluări
- Technology & Livelihood Education: WEEK 6-7Document28 paginiTechnology & Livelihood Education: WEEK 6-7my musicÎncă nu există evaluări
- 1651 EE-ES-2019-1015-R0 Load Flow PQ Capability (ENG)Document62 pagini1651 EE-ES-2019-1015-R0 Load Flow PQ Capability (ENG)Alfonso GonzálezÎncă nu există evaluări