S-ar putea să vă placă și
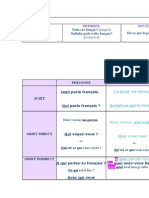
- Place Des Pronoms Objets Directs Et IndirectsDocument2 paginiPlace Des Pronoms Objets Directs Et IndirectsMelainine TounsyÎncă nu există evaluări
- CHMP Demi Anneau PDFDocument1 paginăCHMP Demi Anneau PDFMelainine TounsyÎncă nu există evaluări
- Chap VDocument12 paginiChap VkuuroroÎncă nu există evaluări
- Chap VDocument12 paginiChap VkuuroroÎncă nu există evaluări
- ImgJournal 09 07 2008 18 39 45 PDFDocument8 paginiImgJournal 09 07 2008 18 39 45 PDFMelainine TounsyÎncă nu există evaluări
- Quadripoles Cours - Impression - MASSONDocument53 paginiQuadripoles Cours - Impression - MASSONLinda ToumiÎncă nu există evaluări
- Mini Manuel D'electrocinetiqueDocument240 paginiMini Manuel D'electrocinetiqueWissal Ben Slama80% (5)
- Je Suis Nul en OrthographeDocument102 paginiJe Suis Nul en Orthographesakoa100% (1)
- La grammaire.doc هةحشقبشهفDocument3 paginiLa grammaire.doc هةحشقبشهفMelainine TounsyÎncă nu există evaluări
- La NégationDocument2 paginiLa NégationMelainine TounsyÎncă nu există evaluări
- Les Pronoms RelatifsDocument2 paginiLes Pronoms RelatifsMelainine TounsyÎncă nu există evaluări
- Reussir Un Entretien D'embaucheDocument75 paginiReussir Un Entretien D'embauchesedhass106890% (10)
- L Entretien D Embauche PDFDocument16 paginiL Entretien D Embauche PDFMelainine TounsyÎncă nu există evaluări
- Un CheminDocument2 paginiUn CheminMelainine TounsyÎncă nu există evaluări
- Statique Des Fluides Exo 2Document20 paginiStatique Des Fluides Exo 2Melainine TounsyÎncă nu există evaluări
- INTONATIONDocument2 paginiINTONATIONMelainine TounsyÎncă nu există evaluări
- La Grammaire Le PronomDocument3 paginiLa Grammaire Le PronomMelainine TounsyÎncă nu există evaluări
- La Grammaierr1Document3 paginiLa Grammaierr1Melainine TounsyÎncă nu există evaluări
- ConjugaisonDocument1 paginăConjugaisonMelainine TounsyÎncă nu există evaluări
- ENSIM2A VA2 ExercicesCorrigés PDFDocument30 paginiENSIM2A VA2 ExercicesCorrigés PDFRachid Meftah100% (1)
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 paginiNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- Statique Des Fluides 3Document5 paginiStatique Des Fluides 3Melainine TounsyÎncă nu există evaluări
- Exos IUTCorrDocument4 paginiExos IUTCorrLarbi RahmaniÎncă nu există evaluări
- Cours Sur Les Semi-ConducteursDocument30 paginiCours Sur Les Semi-ConducteursAbderrahman LahouaouiÎncă nu există evaluări
- Ondes Et Vibration 2Document35 paginiOndes Et Vibration 2Melainine TounsyÎncă nu există evaluări
- Electrostatique 1 RésuméDocument24 paginiElectrostatique 1 RésumékhealouÎncă nu există evaluări
- Cours IUTDocument68 paginiCours IUTwqerqewrewÎncă nu există evaluări
- Chap 2Document18 paginiChap 2Melainine TounsyÎncă nu există evaluări
- Introductionalathermodynamiquedesmelanges 122Document8 paginiIntroductionalathermodynamiquedesmelanges 122Melainine TounsyÎncă nu există evaluări
- TP-Installation Et Configuration de Services de CertificatsDocument5 paginiTP-Installation Et Configuration de Services de CertificatsRedfor YouÎncă nu există evaluări
- MimopdfDocument10 paginiMimopdfYans SounaÎncă nu există evaluări
- Cyber GuerreDocument4 paginiCyber GuerreEmile PaumelleÎncă nu există evaluări
- 2 - Présentation Du Domaine LogistiqueDocument17 pagini2 - Présentation Du Domaine LogistiqueLamrani MohamedÎncă nu există evaluări
- Communication de Masse PDFDocument2 paginiCommunication de Masse PDFJackieÎncă nu există evaluări
- Brahim Aaouid 2Document1 paginăBrahim Aaouid 2baghazi abduÎncă nu există evaluări
- Avec Quoi Ca Fonctionne Pages 1 A 7Document7 paginiAvec Quoi Ca Fonctionne Pages 1 A 7Sophie ThoueilleÎncă nu există evaluări
- Rapport Seminaire AEDJ Droit Et Pratique Del HypothequeDocument6 paginiRapport Seminaire AEDJ Droit Et Pratique Del HypothequeAbba DiallÎncă nu există evaluări
- Un Truc Dans L'oeilDocument2 paginiUn Truc Dans L'oeilGUY ROGER KassiÎncă nu există evaluări
- Présentation Référentiel VALITDocument22 paginiPrésentation Référentiel VALITTom LijonesÎncă nu există evaluări
- DNB 2013 Corrige Maths Serie GeneraleDocument4 paginiDNB 2013 Corrige Maths Serie GeneraleLETUDIANTÎncă nu există evaluări
- TM-D1000 Manuel UtilDocument51 paginiTM-D1000 Manuel Utiljucanito7Încă nu există evaluări
- Cours Les Fondamentaux Du MKGDocument112 paginiCours Les Fondamentaux Du MKGlinamrabet21Încă nu există evaluări
- Fiche AbreviationDocument6 paginiFiche AbreviationFranck DompnierÎncă nu există evaluări
- 1810 CRE Rapport Reseaux VEDocument44 pagini1810 CRE Rapport Reseaux VECar LoÎncă nu există evaluări
- PGA 0310 FR FR-FR PDFDocument836 paginiPGA 0310 FR FR-FR PDFredaÎncă nu există evaluări
- Introduction To RDocument8 paginiIntroduction To RAnas CharrouaÎncă nu există evaluări
- Page Garde FusionnéDocument42 paginiPage Garde FusionnéRobert William Ndiaye100% (1)
- AZURA RAPPORT 2019-fr-v2Document60 paginiAZURA RAPPORT 2019-fr-v2Meryem MasrourÎncă nu există evaluări
- Application de Gestion Des Dons MobiliersDocument30 paginiApplication de Gestion Des Dons MobiliersOthman FAOÎncă nu există evaluări
- PCD - Limonade Cefcad-Knfp-Ue 2014 PDFDocument134 paginiPCD - Limonade Cefcad-Knfp-Ue 2014 PDFOcceus JamaelÎncă nu există evaluări
- Procedure Inscription Baccalaureat Gabonais - 2Document44 paginiProcedure Inscription Baccalaureat Gabonais - 2raphael bibeÎncă nu există evaluări
- L3ICDocument9 paginiL3ICSyl Vanno100% (1)
- BitumeDocument16 paginiBitumeMascariÎncă nu există evaluări
- Vinted FR S595338680Document1 paginăVinted FR S595338680Kamélia LazrtÎncă nu există evaluări
- Installation de Chantier PDFDocument71 paginiInstallation de Chantier PDFmighter100% (1)
- TCP IpDocument9 paginiTCP IpkkarroumiÎncă nu există evaluări
- Le Monde Diplomatique Manuel Déconomie Critique EpubLivresDocument668 paginiLe Monde Diplomatique Manuel Déconomie Critique EpubLivresPaul ArthurÎncă nu există evaluări
- MémoireDocument62 paginiMémoireNajd Onis100% (1)
- 18-06-21 Cdca Ettelbruck Lot 16Document17 pagini18-06-21 Cdca Ettelbruck Lot 16AymanNasÎncă nu există evaluări