S-ar putea să vă placă și
- Radiología sala controlDocument13 paginiRadiología sala controlJorge Luis Jeremias EspejoÎncă nu există evaluări
- Reporte LD 3 S A Grupo N 3Document15 paginiReporte LD 3 S A Grupo N 3Paul Jeffry Pillhuaman MoralesÎncă nu există evaluări
- ElectroestimuladorDocument6 paginiElectroestimuladorKarlosjroÎncă nu există evaluări
- Analizadores Automaticos de UroanalisisDocument15 paginiAnalizadores Automaticos de UroanalisisHolger Adrian Benavides CabreraÎncă nu există evaluări
- Telecomunicaciones LaboratorioDocument8 paginiTelecomunicaciones Laboratoriogabriel ernesto artiga vasquezÎncă nu există evaluări
- Emulador de Una Computadora Automótriz PaperDocument9 paginiEmulador de Una Computadora Automótriz PaperCristian Puentestar100% (1)
- Informe1 ConversionDocument7 paginiInforme1 Conversionmiguel antonio martinez moremoÎncă nu există evaluări
- Laboratorio 1Document8 paginiLaboratorio 1schwanz503Încă nu există evaluări
- MicricontroladoresDocument64 paginiMicricontroladoresAlejandro RojasÎncă nu există evaluări
- Realizacion de Un FrecuencimetroDocument10 paginiRealizacion de Un FrecuencimetroJesus FelixÎncă nu există evaluări
- Sistemas de ControlDocument5 paginiSistemas de ControlFaustina RivaneraÎncă nu există evaluări
- Funcionamiento y Operacion Del Osciloscopio OTCDocument7 paginiFuncionamiento y Operacion Del Osciloscopio OTCdamian freireÎncă nu există evaluări
- Informe 1 Uso de Osciloscopio - Byron ToapantaDocument15 paginiInforme 1 Uso de Osciloscopio - Byron ToapantaReneReinaldo100% (1)
- Datos de PicDocument14 paginiDatos de PicVeronica RamirezÎncă nu există evaluări
- Ficha Técnica Unidad de TomoterapiaDocument16 paginiFicha Técnica Unidad de TomoterapiaDaili FloresÎncă nu există evaluări
- Informe Final de Cintas Transportadoras 4.asdDocument16 paginiInforme Final de Cintas Transportadoras 4.asdcristian mininoÎncă nu există evaluări
- Equipos e Instrumentos de DiagnosticoDocument20 paginiEquipos e Instrumentos de Diagnosticoivon100% (1)
- Práctica 5 - Osciloscopio y Generador de Señales HechoDocument5 paginiPráctica 5 - Osciloscopio y Generador de Señales Hecho鿆K A R M A鿆Încă nu există evaluări
- Ud.15 Tc. Principios Físicos y Equipos. Introducción. 2 ParteDocument61 paginiUd.15 Tc. Principios Físicos y Equipos. Introducción. 2 ParterubenÎncă nu există evaluări
- Uso Del ZapperDocument11 paginiUso Del ZapperJuana RosalesÎncă nu există evaluări
- OsiloscopioDocument6 paginiOsiloscopioJAIRO SAUL CAISAGUANO CHICAIZAÎncă nu există evaluări
- Reporte de Práctica No.3Document8 paginiReporte de Práctica No.3Alberto Morales LópezÎncă nu există evaluări
- 1 - Logica Condicional y Secuencial - 2023 - 1Document3 pagini1 - Logica Condicional y Secuencial - 2023 - 1Alan OsorioÎncă nu există evaluări
- PR-F-004 Practica 2Document4 paginiPR-F-004 Practica 2Juan PerezÎncă nu există evaluări
- Guía No2 Módulo CaudalDocument15 paginiGuía No2 Módulo CaudalNando AlarconÎncă nu există evaluări
- Inversión de GiroDocument21 paginiInversión de GiromaynorÎncă nu există evaluări
- Edu PutoDocument5 paginiEdu PutoAxl CooperÎncă nu există evaluări
- Practica #1 Sistema SubamortiguadoDocument9 paginiPractica #1 Sistema SubamortiguadoSergio RayasÎncă nu există evaluări
- Practica #1 Sistema SubamortiguadoDocument9 paginiPractica #1 Sistema SubamortiguadoSergio RayasÎncă nu există evaluări
- PreguntasDocument9 paginiPreguntasWilliamsÎncă nu există evaluări
- Informe de Laboratorio #02 VigilDocument7 paginiInforme de Laboratorio #02 VigilAlexander Sanchez MoralesÎncă nu există evaluări
- Cabinas ErgonomicasDocument49 paginiCabinas ErgonomicasMarioAlbertoCasadosAdame100% (1)
- RegistrosDocument13 paginiRegistrosLeonardo BorregoÎncă nu există evaluări
- Instituto Nacional de Investigaciones NuclearesDocument5 paginiInstituto Nacional de Investigaciones NuclearesRobert MontañezÎncă nu există evaluări
- Variador de velocidad motores trifásicosDocument5 paginiVariador de velocidad motores trifásicosjosphÎncă nu există evaluări
- Automatismos EléctricosDocument8 paginiAutomatismos EléctricosRojo AviadorÎncă nu există evaluări
- Guia PWMDocument7 paginiGuia PWMjuandiegoc12Încă nu există evaluări
- TEMPORIZACIÓNDocument12 paginiTEMPORIZACIÓNMoises SantiagoÎncă nu există evaluări
- Traduccion Manual E-TongDocument23 paginiTraduccion Manual E-Tongmd_corona62Încă nu există evaluări
- Actividad 1 ServomecanismosDocument15 paginiActividad 1 Servomecanismosanalucia.guajardovrlÎncă nu există evaluări
- Practica 8 - Modulación Por Ancho de PulsoDocument10 paginiPractica 8 - Modulación Por Ancho de PulsoAlejandra OlveraÎncă nu există evaluări
- Sensor Rotacion PDFDocument4 paginiSensor Rotacion PDFFranco ValledorÎncă nu există evaluări
- Tomógrafo de Retina de Heidelberg (HRT) - Glaucoma IIDocument22 paginiTomógrafo de Retina de Heidelberg (HRT) - Glaucoma IIRichardÎncă nu există evaluări
- P6 DSM 1827471Document17 paginiP6 DSM 1827471Elan Gabriel Moreno SanchezÎncă nu există evaluări
- Auti 004 (Control Secuencia Con PLC) 2 - 19Document6 paginiAuti 004 (Control Secuencia Con PLC) 2 - 19Carlos Otalora AldanaÎncă nu există evaluări
- UNI CUSCO LAB CIRCUITOSDocument20 paginiUNI CUSCO LAB CIRCUITOSROD STEVEN CARRASCO BENAVENTEÎncă nu există evaluări
- Lab Sistemas MIcroprocesados Practica12 2018ADocument3 paginiLab Sistemas MIcroprocesados Practica12 2018AAngelogc2014Încă nu există evaluări
- Fundamentos de Teoría de Control Automático y AplicacionesDocument2 paginiFundamentos de Teoría de Control Automático y AplicacionesRaziel MedinaÎncă nu există evaluări
- Programacion de Los MicrocontroladoresDocument8 paginiProgramacion de Los MicrocontroladoresSkp FAÎncă nu există evaluări
- Control ServoDocument16 paginiControl ServoJULIET MUNOZ GARCIAÎncă nu există evaluări
- Informe 4 Labo-MicDocument12 paginiInforme 4 Labo-Mic-Pendexxx- 20Încă nu există evaluări
- Interrupciones Timer0Document13 paginiInterrupciones Timer0Marco Antonio MayoraÎncă nu există evaluări
- Control de Una Articulacin Empleando Seales Mioelectricas de Los Msculos Del BrazoDocument5 paginiControl de Una Articulacin Empleando Seales Mioelectricas de Los Msculos Del BrazoPietro Alberto Miranda PereiraÎncă nu există evaluări
- Consolidado Proyecto Final Electronica IndustrialDocument15 paginiConsolidado Proyecto Final Electronica Industrialnewman135_277960859Încă nu există evaluări
- Iforme de Lab 3 4 5Document9 paginiIforme de Lab 3 4 5Salustria Cabezas SánchezÎncă nu există evaluări
- Actividad 1 Servomecanismos - 1905338Document17 paginiActividad 1 Servomecanismos - 1905338analucia.guajardo11Încă nu există evaluări
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209De la EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Evaluare: 4.5 din 5 stele4.5/5 (2)
- Gestión auxiliar de reproducción en soporte convencional o informático. ADGG0508De la EverandGestión auxiliar de reproducción en soporte convencional o informático. ADGG0508Încă nu există evaluări
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De la EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Încă nu există evaluări
- 100 circuitos de shields para arduino (español)De la Everand100 circuitos de shields para arduino (español)Evaluare: 3.5 din 5 stele3.5/5 (3)
- Richard Gordon El Toque CuanticoDocument172 paginiRichard Gordon El Toque Cuanticojornat100% (36)
- Fundamentosdeacupunturaymoxibustionchina Lenguasextranjerasbeijin 140124122332 Phpapp02 PDFDocument296 paginiFundamentosdeacupunturaymoxibustionchina Lenguasextranjerasbeijin 140124122332 Phpapp02 PDFRuby Ans Criz100% (1)
- Libro de Familiares EneurismasDocument175 paginiLibro de Familiares EneurismasmarenitasÎncă nu există evaluări
- Dieta para Desintoxicar El HígadoDocument3 paginiDieta para Desintoxicar El Hígadomarenitas100% (1)
- Graham-Curacion Con ColorDocument73 paginiGraham-Curacion Con ColorMarian100% (1)
- Limpieza del colon con irrigacionesDocument6 paginiLimpieza del colon con irrigacionesJose CastilloÎncă nu există evaluări
- HardingDocument4 paginiHardingmarenitasÎncă nu există evaluări
- Dieta Vegetariana y Aplicacion Terapeútica Por Pablo SazDocument15 paginiDieta Vegetariana y Aplicacion Terapeútica Por Pablo SaztordynakaÎncă nu există evaluări
- Libro Blanco de Los Herbolarios y Las Plantas MedicinalesDocument176 paginiLibro Blanco de Los Herbolarios y Las Plantas Medicinales210362100% (20)
- El Poder Curativo Del AGUA (Masaru Emoto)Document138 paginiEl Poder Curativo Del AGUA (Masaru Emoto)Isidora92% (50)
- Cefalea y Algias FacialesDocument79 paginiCefalea y Algias Facialesapi-3698281100% (3)
- Acupuntura - Mecanismos BásicosDocument12 paginiAcupuntura - Mecanismos BásicosMercedes Lima100% (1)
- La Tecnica Dra ClarckDocument83 paginiLa Tecnica Dra ClarckvictoriacharcasÎncă nu există evaluări
- Graham-Curacion Con ColorDocument73 paginiGraham-Curacion Con ColorMarian100% (1)
- Vasos MaravillososDocument172 paginiVasos MaravillososDiego NicoliniÎncă nu există evaluări
- Acupuntura y Obesidad ADocument16 paginiAcupuntura y Obesidad ATAOTEKINGÎncă nu există evaluări
- Acupuntura VeterinariaDocument14 paginiAcupuntura VeterinariaPerla OrtizÎncă nu există evaluări
- 8 puntos extraordinariosDocument24 pagini8 puntos extraordinariosmarenitasÎncă nu există evaluări
- Bases Cientificas de La AcupunturaDocument23 paginiBases Cientificas de La AcupunturamarenitasÎncă nu există evaluări
- El Estres y La Medicina Tradicional ChinaDocument4 paginiEl Estres y La Medicina Tradicional ChinamarenitasÎncă nu există evaluări
- Bioquimica2 DigestionDocument77 paginiBioquimica2 DigestionmarenitasÎncă nu există evaluări
- Acupuntura y Dolor (20488 Lecturas)Document4 paginiAcupuntura y Dolor (20488 Lecturas)Herman H. FloresÎncă nu există evaluări
- Alcalinización MilagrosaDocument18 paginiAlcalinización MilagrosamarenitasÎncă nu există evaluări
- La ModaDocument13 paginiLa ModamarenitasÎncă nu există evaluări
- Vacunacion y Desparasitacion en CachorrosDocument15 paginiVacunacion y Desparasitacion en CachorrosmarenitasÎncă nu există evaluări
- Codesarrollo de Aprendizaje c2Document12 paginiCodesarrollo de Aprendizaje c2Clemente Baeza JiménezÎncă nu există evaluări
- Perforación DireccionalDocument5 paginiPerforación DireccionalAnverlita Paolita Zamora GutierrezÎncă nu există evaluări
- Seguridad de Sellos - Webinario CTPAT 2020 en EspañolDocument21 paginiSeguridad de Sellos - Webinario CTPAT 2020 en EspañolLindy LeonidesÎncă nu există evaluări
- Revista Latinoamericana de Ciencias Sociales, Niñez y JuventudDocument749 paginiRevista Latinoamericana de Ciencias Sociales, Niñez y JuventudPaula CabzÎncă nu există evaluări
- Que Es La RadiaciónDocument18 paginiQue Es La RadiaciónViviana Molina100% (1)
- Ats Conexion PanelesDocument3 paginiAts Conexion PanelessilviaÎncă nu există evaluări
- Interfaz de Usuario Sobre GWT - Utilizando GWT Designer, Simplificando El DiseñoDocument11 paginiInterfaz de Usuario Sobre GWT - Utilizando GWT Designer, Simplificando El DiseñoNicolás BortolottiÎncă nu există evaluări
- Memoria-Descriptiva - Cordova CordovaDocument6 paginiMemoria-Descriptiva - Cordova CordovaJean Paul Miñano VelizÎncă nu există evaluări
- 3.1 Presupuesto de ObraDocument18 pagini3.1 Presupuesto de ObraVimar Percca LopezÎncă nu există evaluări
- Historia Del Internet, Navegadores y ExcelDocument6 paginiHistoria Del Internet, Navegadores y ExcelMisael CabreraÎncă nu există evaluări
- T1 Grupo4 Práctica5 IC3 4Document17 paginiT1 Grupo4 Práctica5 IC3 4isabelaÎncă nu există evaluări
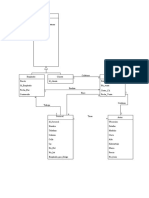
- Diagrama UMLDocument1 paginăDiagrama UMLAlfalfaÎncă nu există evaluări
- Caso PorscheDocument5 paginiCaso PorscheDerLorenaÎncă nu există evaluări
- Catalogo de InkaozonoDocument10 paginiCatalogo de InkaozonoCarlos ChumbezÎncă nu există evaluări
- TRABAJO 6 de OperativaDocument7 paginiTRABAJO 6 de OperativaedithÎncă nu există evaluări
- Tipos de EsquemasDocument3 paginiTipos de EsquemasAngel Moreno PaicoÎncă nu există evaluări
- Word HidrostaticaDocument28 paginiWord HidrostaticaKENIA HERRERA JIMÉNEZÎncă nu există evaluări
- Idoc - Pub - Tipo de Medio Arbol de ValvulasDocument20 paginiIdoc - Pub - Tipo de Medio Arbol de ValvulasJesus T. GarciaÎncă nu există evaluări
- Marco TeoricoDocument5 paginiMarco TeoricoGuadalupeÎncă nu există evaluări
- Artemelt HM 89056 COL2Document8 paginiArtemelt HM 89056 COL2Alexandra RojasÎncă nu există evaluări
- Curso PHPDocument62 paginiCurso PHPTecnosistemas AMC CAÎncă nu există evaluări
- Axt 1Document5 paginiAxt 1Diana Figueroa Sierra50% (2)
- Diseño y DistribucionDocument3 paginiDiseño y DistribucionJorge MadridÎncă nu există evaluări
- Esp CuadernilloalumnoDocument41 paginiEsp CuadernilloalumnoOvidi CarbonellÎncă nu există evaluări
- Libros 1a 2017 2018 PDFDocument1 paginăLibros 1a 2017 2018 PDFjudas1432Încă nu există evaluări
- FT Titan XPR HS 80Document9 paginiFT Titan XPR HS 80eliasjosecÎncă nu există evaluări
- Word 2016 tutorialDocument6 paginiWord 2016 tutorialAULA TICÎncă nu există evaluări
- Lovato - LPC B7223 - Pulsador Doble PDFDocument1 paginăLovato - LPC B7223 - Pulsador Doble PDFcanelengresÎncă nu există evaluări
- Estudio BatimetriaDocument13 paginiEstudio BatimetriaVeronica Andrea Urrutia EscobarÎncă nu există evaluări
- Acta de Conformidad Por Reparacion y Mantenimiento DentalDocument7 paginiActa de Conformidad Por Reparacion y Mantenimiento DentalOrutra GuemirÎncă nu există evaluări