S-ar putea să vă placă și
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésDe la EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésEvaluare: 4.5 din 5 stele4.5/5 (4)
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2De la EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Încă nu există evaluări
- Corriges Des Exercices Algorithme TOUS LES NIVEAUXDocument57 paginiCorriges Des Exercices Algorithme TOUS LES NIVEAUXAyoub Moustaouli79% (29)
- La Gestion Administrative Du PersonnelDocument11 paginiLa Gestion Administrative Du PersonnelNajia El Yanboiy100% (8)
- Tours de magie épatants reliés aux carrés magiquesDe la EverandTours de magie épatants reliés aux carrés magiquesÎncă nu există evaluări
- Équations différentielles: Les Grands Articles d'UniversalisDe la EverandÉquations différentielles: Les Grands Articles d'UniversalisÎncă nu există evaluări
- Techniques de Calcul de La Somme D'une Série EntièreDocument6 paginiTechniques de Calcul de La Somme D'une Série EntièreEssaidi Ali73% (15)
- Data Scientist Les Fondamentaux de La Data Science - OFDS - PLBDocument4 paginiData Scientist Les Fondamentaux de La Data Science - OFDS - PLBAzerÎncă nu există evaluări
- Les Structure MixtesDocument29 paginiLes Structure Mixteshoudazereg57% (7)
- AL7SN12TEPA0111 Corriges Des Activites Partie 01Document99 paginiAL7SN12TEPA0111 Corriges Des Activites Partie 01GadhoumiWalidÎncă nu există evaluări
- Exercices Moteur AsynchroneDocument17 paginiExercices Moteur AsynchroneismailÎncă nu există evaluări
- Fonctions de Bessel - CorrectionDocument13 paginiFonctions de Bessel - CorrectionEssaidi Ali100% (1)
- Seron 2008 Rééducation CognitiveDocument10 paginiSeron 2008 Rééducation CognitiveEnnio FioramontiÎncă nu există evaluări
- VDocument7 paginiVعثمان البريشيÎncă nu există evaluări
- G4 Theophraste. Caracteres (Navarre 1920)Document92 paginiG4 Theophraste. Caracteres (Navarre 1920)Paweł MajewskiÎncă nu există evaluări
- Correction PRB 3Document7 paginiCorrection PRB 3marwaneeeeÎncă nu există evaluări
- CC2 - CorrectionDocument5 paginiCC2 - Correctionrodriguez.stacy.umÎncă nu există evaluări
- 32 Dimension Planche CorrigesDocument8 pagini32 Dimension Planche CorrigesIbrahimÎncă nu există evaluări
- Cor pb040Document3 paginiCor pb040jawahermohamed.maÎncă nu există evaluări
- CCP 2010 PC m1 CorrigeDocument9 paginiCCP 2010 PC m1 CorrigeAyoubÎncă nu există evaluări
- Corrige Exam Maths IIAlgebre 2008Document2 paginiCorrige Exam Maths IIAlgebre 2008adlane MohamedÎncă nu există evaluări
- CCP Maths 1 MP 2011 CorrigeDocument5 paginiCCP Maths 1 MP 2011 Corrigegad abdÎncă nu există evaluări
- ISEEco 2007 CDocument16 paginiISEEco 2007 CA AakÎncă nu există evaluări
- Cours SeriesFourierDocument33 paginiCours SeriesFourierAyoub DaddaÎncă nu există evaluări
- ISEEco 2005 CDocument8 paginiISEEco 2005 Cabdel dalilÎncă nu există evaluări
- Techniques de Calcul de La Somme D'une Série EntièreDocument6 paginiTechniques de Calcul de La Somme D'une Série EntièreessaidialiÎncă nu există evaluări
- 612a747e49235sujet Et Corrige 1ere Epreuve de Maths Ise OptionDocument11 pagini612a747e49235sujet Et Corrige 1ere Epreuve de Maths Ise OptioninoÎncă nu există evaluări
- CDS7Document4 paginiCDS7Omar SavÎncă nu există evaluări
- ITSBMath 2006 CDocument10 paginiITSBMath 2006 CFirmin NeudorfÎncă nu există evaluări
- Series Four CorrectionDocument11 paginiSeries Four CorrectionAyou HamÎncă nu există evaluări
- TD SmaDocument8 paginiTD SmaPHPÎncă nu există evaluări
- Réduction Des Endomorphismes - Calcul de Polynôme MinimalDocument3 paginiRéduction Des Endomorphismes - Calcul de Polynôme MinimalHamza PrintoOsÎncă nu există evaluări
- 36 Produit Scalaire CorrigeDocument10 pagini36 Produit Scalaire CorrigeSaraIdrissi100% (1)
- CCP - 2002 - MP - M1 - Corrige 1 PDFDocument6 paginiCCP - 2002 - MP - M1 - Corrige 1 PDFZouhair NajarÎncă nu există evaluări
- TrigonalisationDocument2 paginiTrigonalisationMusta Bm100% (1)
- Espaces Préhilbertiens - Distance À Un Sous-Espace VectorielDocument3 paginiEspaces Préhilbertiens - Distance À Un Sous-Espace VectorielHamza PrintoOsÎncă nu există evaluări
- E3A 2002 MP Maths3 CorrigeDocument4 paginiE3A 2002 MP Maths3 CorrigeMehdi Amal0% (1)
- Suite de FibonacciDocument3 paginiSuite de Fibonaccianas achmitÎncă nu există evaluări
- PARTIELJUIN2007Document7 paginiPARTIELJUIN2007Chérif BAÎncă nu există evaluări
- Zeta de 2Document6 paginiZeta de 2Mourad TajÎncă nu există evaluări
- Corrigé KabbajDocument7 paginiCorrigé KabbajAbdelhamid Dehayni AL AbdaliÎncă nu există evaluări
- Corrigés TD - Algèbre - 1Document26 paginiCorrigés TD - Algèbre - 1spectrum66Încă nu există evaluări
- Ecricome 2011 E-CDocument10 paginiEcricome 2011 E-CmarwaneeeeÎncă nu există evaluări
- FibonnacciDocument2 paginiFibonnacciFatima-Zahra BensoudaÎncă nu există evaluări
- 2004Document2 pagini2004Zaki RibouÎncă nu există evaluări
- Corr Rattrapage2021Document3 paginiCorr Rattrapage2021MIRA KAWTAR SMPC A6Încă nu există evaluări
- Les AnnalesDocument143 paginiLes AnnalesAmina RafikÎncă nu există evaluări
- ArithmetiqueDocument6 paginiArithmetiqueFantin23Încă nu există evaluări
- Correction CCP 2013 MP Math1Document5 paginiCorrection CCP 2013 MP Math1Anas ManitaÎncă nu există evaluări
- TD02 PC 2012 EVN CorrigesDocument11 paginiTD02 PC 2012 EVN CorrigesIrène Dohouin100% (1)
- MathDocument19 paginiMathKevin LamÎncă nu există evaluări
- 2 Rsa CorrectionDocument4 pagini2 Rsa CorrectionIslamBulÎncă nu există evaluări
- 1 Capesa 1996Document21 pagini1 Capesa 1996Albert ReimanÎncă nu există evaluări
- Corrige Math3 Cc2 Automne 2015Document7 paginiCorrige Math3 Cc2 Automne 2015OthnielÎncă nu există evaluări
- 08 MP 1 Alg 3Document9 pagini08 MP 1 Alg 3Moukhtar DiopÎncă nu există evaluări
- SaintCyr 1992 M1 CorrigeDocument7 paginiSaintCyr 1992 M1 CorrigeChristian MudimisiÎncă nu există evaluări
- Cor - pb028 Corrigé Math NilpotentDocument2 paginiCor - pb028 Corrigé Math NilpotentfatimawahfatimaÎncă nu există evaluări
- M PT Sca JMF 2 PDFDocument9 paginiM PT Sca JMF 2 PDFBrenton MorrisonÎncă nu există evaluări
- Fonctions de Bessel - CorrectionDocument7 paginiFonctions de Bessel - CorrectionEssaidi AliÎncă nu există evaluări
- ISEEco 2000 CDocument11 paginiISEEco 2000 CST G-dyÎncă nu există evaluări
- Algèbre LinéaireDocument12 paginiAlgèbre LinéaireAlexis Michel FossartÎncă nu există evaluări
- Algoboxbook 1Document56 paginiAlgoboxbook 1Ayoub MoustaouliÎncă nu există evaluări
- AlgoDocument27 paginiAlgoBlume DewÎncă nu există evaluări
- Virus InformatiqueDocument7 paginiVirus InformatiqueAyoub MoustaouliÎncă nu există evaluări
- Chapitre3 PDFDocument20 paginiChapitre3 PDFensagtrÎncă nu există evaluări
- 14 Matrices PDFDocument3 pagini14 Matrices PDFMohamed RdaitÎncă nu există evaluări
- Controle1 Analyse3Document2 paginiControle1 Analyse3Ayoub MoustaouliÎncă nu există evaluări
- CIN5 TorseurDocument4 paginiCIN5 TorseurAyoub MoustaouliÎncă nu există evaluări
- TD CristalloDocument4 paginiTD CristalloAyoub Moustaouli50% (2)
- Radioactivitã© Rã©actions Nuclã©airesDocument4 paginiRadioactivitã© Rã©actions Nuclã©airesAyoub MoustaouliÎncă nu există evaluări
- Ben Mostefa Daho WailDocument13 paginiBen Mostefa Daho Wailfaroukhan0808Încă nu există evaluări
- Annexe TP4Document2 paginiAnnexe TP4Zied GandouziÎncă nu există evaluări
- Disjoncteur Moteur Magnetothermique ENTDocument3 paginiDisjoncteur Moteur Magnetothermique ENTMame ware DiagneÎncă nu există evaluări
- E BookDocument13 paginiE BookBOUSSEN RIMÎncă nu există evaluări
- Brochure Enser FranceDocument23 paginiBrochure Enser FranceValenty Abou JaoudeÎncă nu există evaluări
- Analyse Financière Et ComptabilitéDocument14 paginiAnalyse Financière Et ComptabilitéGhofrane ZaouiÎncă nu există evaluări
- Le Génie Civil Revue (... ) bpt6k6473018q PDFDocument116 paginiLe Génie Civil Revue (... ) bpt6k6473018q PDFAlan RodriguesÎncă nu există evaluări
- Correction QCMDocument7 paginiCorrection QCMMoetaz HnanaÎncă nu există evaluări
- Info Niv1 Cours2 FRDocument6 paginiInfo Niv1 Cours2 FRDjamilaTalebÎncă nu există evaluări
- Cours - API Et Programmation L3 AutoDocument17 paginiCours - API Et Programmation L3 AutoimenenouvelleÎncă nu există evaluări
- Évaluation Certificative - Ce1d 2017 - Mathématiques - Questionnaires Version Standard Ressource 13980Document40 paginiÉvaluation Certificative - Ce1d 2017 - Mathématiques - Questionnaires Version Standard Ressource 13980ABDELHAK DRIOUCHEÎncă nu există evaluări
- Chapitre IDocument6 paginiChapitre IHachani SafiaÎncă nu există evaluări
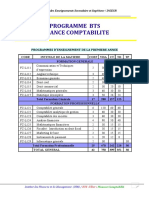
- Programme BTSDocument3 paginiProgramme BTSIssa KABOREÎncă nu există evaluări
- Campus FranceDocument14 paginiCampus FranceMoucha JustdoitÎncă nu există evaluări
- Conte Rendu de TP1 AdoDocument18 paginiConte Rendu de TP1 Adoyassine choukriÎncă nu există evaluări
- DOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursDocument2 paginiDOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursLin EduÎncă nu există evaluări
- Le Dauphin Vol 68-Juin 2011Document44 paginiLe Dauphin Vol 68-Juin 2011GCACQÎncă nu există evaluări
- 2003elakremi Roussel045Document34 pagini2003elakremi Roussel045Esther SimeuÎncă nu există evaluări
- Entrainement ECE SVTDocument7 paginiEntrainement ECE SVTtiktokÎncă nu există evaluări
- Geni Civil m3 2009Document90 paginiGeni Civil m3 2009Benazza TlemcenÎncă nu există evaluări
- TrajectoiresDocument8 paginiTrajectoiresDenis TuralicÎncă nu există evaluări
- TttsDocument6 paginiTttsIslameddine2 BenzergaÎncă nu există evaluări