S-ar putea să vă placă și
- Trabajo Domiciliario de Medidas Electricas 2018 BDocument3 paginiTrabajo Domiciliario de Medidas Electricas 2018 BalexanderÎncă nu există evaluări
- 00 Medidas Electricas HM PDFDocument11 pagini00 Medidas Electricas HM PDFAlvaroArellanoSuarezÎncă nu există evaluări
- Generador Sincrono A.C. Caracteristicas Del Generador Bajo CargaDocument5 paginiGenerador Sincrono A.C. Caracteristicas Del Generador Bajo CargaAlexander Quiroz CáceresÎncă nu există evaluări
- 01 Base Teorica Ultimo GGHHHHDocument75 pagini01 Base Teorica Ultimo GGHHHHGino Román CisnerosÎncă nu există evaluări
- Metrologia Lab 1Document19 paginiMetrologia Lab 1ivan Falcon AlmonacidÎncă nu există evaluări
- Determinación Del Angulo de Pérdidas y El Factor de Pérdidas de Un CondensadorDocument5 paginiDeterminación Del Angulo de Pérdidas y El Factor de Pérdidas de Un CondensadorCarlos J GarcíaÎncă nu există evaluări
- Circuitos Trifásicos 13092020Document68 paginiCircuitos Trifásicos 13092020MAX ALBERTÎncă nu există evaluări
- Me II 01 Operacion Dinamica de Maquinas ElectricasDocument20 paginiMe II 01 Operacion Dinamica de Maquinas ElectricasjacojhamesÎncă nu există evaluări
- Sol Examen Parcial Eip 2019aDocument1 paginăSol Examen Parcial Eip 2019aMaicol PonceÎncă nu există evaluări
- Informe Final IvanDocument17 paginiInforme Final IvanJaime VenegasÎncă nu există evaluări
- Protocolo de Seguridad en El Laboratorio de ElectricidadDocument2 paginiProtocolo de Seguridad en El Laboratorio de ElectricidadJaime Franksue Sullon LiÎncă nu există evaluări
- Examen de Laboratorio Elt 2510 Circuitos Electricos IIDocument11 paginiExamen de Laboratorio Elt 2510 Circuitos Electricos IIgabriel_xpÎncă nu există evaluări
- A05 Control, Perdidas y Reaccion Del Inducido en Maq. CC PDFDocument43 paginiA05 Control, Perdidas y Reaccion Del Inducido en Maq. CC PDFmarcosÎncă nu există evaluări
- Analisis de Sistemas Electricos de Potencia I EE-353M: CursoDocument115 paginiAnalisis de Sistemas Electricos de Potencia I EE-353M: CursoAntonio de la CruzÎncă nu există evaluări
- Influencia Del Factor de Potencia en La Lectura de Un Vatímetro - Previo 01Document5 paginiInfluencia Del Factor de Potencia en La Lectura de Un Vatímetro - Previo 01Gustavo Gomez100% (1)
- Influencia Del Factor de Potencia en La Lectura de Un VatimetroDocument5 paginiInfluencia Del Factor de Potencia en La Lectura de Un VatimetroLuis Rique SánchezÎncă nu există evaluări
- Final Puican 2Document28 paginiFinal Puican 2Franco Gustavo JHÎncă nu există evaluări
- Medición de Parámetros Eléctricos y Dieléctricos de Un Cable de EnergíaDocument5 paginiMedición de Parámetros Eléctricos y Dieléctricos de Un Cable de EnergíaDenis E. S. MatosÎncă nu există evaluări
- 01 Bancos Condensadores Julio 2020 PDFDocument44 pagini01 Bancos Condensadores Julio 2020 PDFLGsus TorresÎncă nu există evaluări
- Ee 391 Laboratorio de Medidas Electricas IDocument2 paginiEe 391 Laboratorio de Medidas Electricas ICarmenBarrientosÎncă nu există evaluări
- Mediciones Electricas Clase 11 TABLEROS de MEDICIONDocument27 paginiMediciones Electricas Clase 11 TABLEROS de MEDICIONNirvanaxDÎncă nu există evaluări
- Hallazgo de Rueda HidráulicaDocument4 paginiHallazgo de Rueda HidráulicaHenry Chiclla HuamanÎncă nu există evaluări
- Semana 10 - Turbomáquinas I 2020-1 SGCHDocument7 paginiSemana 10 - Turbomáquinas I 2020-1 SGCHBrendaCastroÎncă nu există evaluări
- Reglamento General de Uso y Servicio Del Laboratorio de Electricidad, Norma de Seguridad, Uso de Herramientas e Instrumentos de Medición de Magnitudes EléctricasDocument17 paginiReglamento General de Uso y Servicio Del Laboratorio de Electricidad, Norma de Seguridad, Uso de Herramientas e Instrumentos de Medición de Magnitudes EléctricasjajajaÎncă nu există evaluări
- Lab de Circuitos Electricos 2 UniDocument32 paginiLab de Circuitos Electricos 2 UniGiraldoCarpioRamosÎncă nu există evaluări
- Labo 5 Final Labo de Medidas 1Document10 paginiLabo 5 Final Labo de Medidas 1Marco RafaelÎncă nu există evaluări
- Formacion de Campos MagneticosDocument3 paginiFormacion de Campos MagneticoscristianÎncă nu există evaluări
- ACE2-Lab6 Potencia 1f W3V-enviarDocument3 paginiACE2-Lab6 Potencia 1f W3V-enviarBrayan Leyva AÎncă nu există evaluări
- Informe 1-Laboratorio de Circuitos 2Document37 paginiInforme 1-Laboratorio de Circuitos 2Xabier BarreiroÎncă nu există evaluări
- Informe 5 UnmsmDocument11 paginiInforme 5 UnmsmJanpier Franco Pizarro NonalayaÎncă nu există evaluări
- Accionamientos Electrico en CCDocument14 paginiAccionamientos Electrico en CCGinner SantiagoÎncă nu există evaluări
- MARCO TEORICO Y CIRCUITO FinalDocument6 paginiMARCO TEORICO Y CIRCUITO FinalGerson ChaconÎncă nu există evaluări
- Representación en Diagramas de Instrumentación IsaDocument8 paginiRepresentación en Diagramas de Instrumentación IsaChristian Gerson Alvarado CastilloÎncă nu există evaluări
- Informe Final n3 Sistemas de Control 2Document9 paginiInforme Final n3 Sistemas de Control 2Therion456Încă nu există evaluări
- Laboratorio 3 - Potencia y Factor de Potencia en Circuito MonofásicoDocument16 paginiLaboratorio 3 - Potencia y Factor de Potencia en Circuito MonofásicoMICHAEL JOSEPH CACHICATARI LICAS0% (1)
- Laboratorio 2 - El Transformador Monofasico - EE241NDocument21 paginiLaboratorio 2 - El Transformador Monofasico - EE241Nmaicol sumaranÎncă nu există evaluări
- Proyecto Final Con ArduinoDocument50 paginiProyecto Final Con ArduinoGiordano GarcíaÎncă nu există evaluări
- Previo 4Document7 paginiPrevio 4Bit ClodeÎncă nu există evaluări
- Medidas 2020 IDocument8 paginiMedidas 2020 IJanpier Franco Pizarro Nonalaya100% (2)
- Teorema de Reciprocidad (Informe Terminado)Document6 paginiTeorema de Reciprocidad (Informe Terminado)Vladimir Falcon LunaÎncă nu există evaluări
- Apendice Ensayos de Maquinas Electricas Fiee UnacDocument7 paginiApendice Ensayos de Maquinas Electricas Fiee Unacvaleria_villeÎncă nu există evaluări
- Basico Instalaciones BTDocument146 paginiBasico Instalaciones BTgabriel alonso100% (1)
- INFORME V-AUTOMATIZACION-ARRANQUE DIRECTO Y GIRO MOTORES-PLC-ultimoDocument9 paginiINFORME V-AUTOMATIZACION-ARRANQUE DIRECTO Y GIRO MOTORES-PLC-ultimoAlexisBuitronDurandÎncă nu există evaluări
- Informe Previo N 3: Resonancia de Circuitos ElectricosDocument4 paginiInforme Previo N 3: Resonancia de Circuitos ElectricosLuis Picon LoliÎncă nu există evaluări
- Lab 5. Circuitos CapacitivosDocument4 paginiLab 5. Circuitos CapacitivosKaren JiménezÎncă nu există evaluări
- Universidad Nacional de Ingenieria: Informe Previo #4 "Medición de La Resistividad Del Terreno"Document5 paginiUniversidad Nacional de Ingenieria: Informe Previo #4 "Medición de La Resistividad Del Terreno"cesar preciado herediaÎncă nu există evaluări
- Generador CCDocument13 paginiGenerador CCNick Miranda LozanoÎncă nu există evaluări
- Lab 4Document17 paginiLab 4Juan Reyes CaballeroÎncă nu există evaluări
- Potencia Electrica en Un Circuito Trifasico Equilibrado)Document21 paginiPotencia Electrica en Un Circuito Trifasico Equilibrado)jhon davidÎncă nu există evaluări
- 2 - Circuitos TrifasicosDocument24 pagini2 - Circuitos TrifasicosLeonardo AparicioÎncă nu există evaluări
- Ie - 01 Predios Unifamiliares y MultifamiliaresDocument18 paginiIe - 01 Predios Unifamiliares y MultifamiliaresKatherine María Zambrano Casas100% (1)
- Curva de MagnetizacionDocument8 paginiCurva de MagnetizacionCarlos Francisco Flores RamosÎncă nu există evaluări
- Trabajo 2 Ee235Document7 paginiTrabajo 2 Ee235anthobra100% (1)
- Informe 4 Maquinas ElectricasDocument11 paginiInforme 4 Maquinas Electricastizico5000Încă nu există evaluări
- Lab Circuitos 2Document6 paginiLab Circuitos 2Marco Ortiz De Orue SerranoÎncă nu există evaluări
- MAJEÑOSDocument2 paginiMAJEÑOSGutierrez CristopherÎncă nu există evaluări
- Elementos LinealesDocument5 paginiElementos Linealesalexis olivos chavezÎncă nu există evaluări
- Informe Previo 2 - EE240Document7 paginiInforme Previo 2 - EE240Bernick Lincoln Salvador RosasÎncă nu există evaluări
- Operacion y Control Motores SincronosDocument23 paginiOperacion y Control Motores SincronosAlonso CrisóstomoÎncă nu există evaluări
- Actuadores EléctricosDocument34 paginiActuadores EléctricosAlexLoyola92Încă nu există evaluări
- Tuberias Largas Vs CortasDocument2 paginiTuberias Largas Vs CortasCamilo Rivera CalquinÎncă nu există evaluări
- Mantenimiento, Regulación y Limpieza VaillantDocument5 paginiMantenimiento, Regulación y Limpieza VaillantCamilo Rivera CalquinÎncă nu există evaluări
- Guia Aire Acondicionado PDFDocument18 paginiGuia Aire Acondicionado PDFrefrigeracÎncă nu există evaluări
- Ventiladores de Flujo AxialDocument3 paginiVentiladores de Flujo AxialCamilo Rivera CalquinÎncă nu există evaluări
- Cálculo Condensadores para MotoresDocument5 paginiCálculo Condensadores para MotoresAnonymous f6yup1Încă nu există evaluări
- Refrigerant EsDocument4 paginiRefrigerant EsCamilo Rivera CalquinÎncă nu există evaluări
- Control de Ruido en Sistemas de Climatización - Parte IIDocument2 paginiControl de Ruido en Sistemas de Climatización - Parte IICamilo Rivera CalquinÎncă nu există evaluări
- AE-1105-R4 Limpieza Del SistemaDocument4 paginiAE-1105-R4 Limpieza Del SistemaCamilo Rivera CalquinÎncă nu există evaluări
- Compacto 3 A 5 Ton - CDocument2 paginiCompacto 3 A 5 Ton - CCamilo Rivera CalquinÎncă nu există evaluări
- Sistemas Enfriados Por AguaDocument5 paginiSistemas Enfriados Por AguaCamilo Rivera CalquinÎncă nu există evaluări
- Cortinas de AireDocument12 paginiCortinas de AireCamilo Rivera CalquinÎncă nu există evaluări
- Casos Prácticos de VentilaciónDocument12 paginiCasos Prácticos de VentilaciónCamilo Rivera CalquinÎncă nu există evaluări
- Determinación de Caudales de Aire en Equipos de ClimatizaciónDocument4 paginiDeterminación de Caudales de Aire en Equipos de ClimatizaciónCamilo Rivera CalquinÎncă nu există evaluări
- Diccionario Técnico Profesional 1 PDFDocument19 paginiDiccionario Técnico Profesional 1 PDFCamilo Rivera CalquinÎncă nu există evaluări
- AE4-1307 Aplic para Hermeticos CF RefrigeraciónDocument2 paginiAE4-1307 Aplic para Hermeticos CF RefrigeraciónCamilo Rivera CalquinÎncă nu există evaluări
- Cables y ConductoresDocument19 paginiCables y ConductoresCamilo Rivera CalquinÎncă nu există evaluări
- Mini Split Muro - TDocument108 paginiMini Split Muro - TCamilo Rivera CalquinÎncă nu există evaluări
- Efecto InvernaderoDocument7 paginiEfecto InvernaderoCamilo Rivera CalquinÎncă nu există evaluări
- Gases RefrigerantesDocument18 paginiGases RefrigerantesHugo Hernandez MÎncă nu există evaluări
- Calderas CDocument4 paginiCalderas CCamilo Rivera CalquinÎncă nu există evaluări
- 21 Diseño de Los Componentes de Una CalderaDocument33 pagini21 Diseño de Los Componentes de Una CalderaCamilo Rivera CalquinÎncă nu există evaluări
- Compresores FrickDocument99 paginiCompresores FrickCamilo Rivera Calquin100% (13)
- CassetteDocument2 paginiCassetteCamilo Rivera CalquinÎncă nu există evaluări
- Mas de 7500 Citas, Proverbios y Frases CelebresDocument786 paginiMas de 7500 Citas, Proverbios y Frases CelebresMaria Flores83% (6)
- CALDERAS Elementos Que Las ComponenDocument6 paginiCALDERAS Elementos Que Las ComponenEduardo del CarmenÎncă nu există evaluări
- Renovaciones de AireDocument8 paginiRenovaciones de AireCamilo Rivera CalquinÎncă nu există evaluări
- 33CSSP2-WC InstalaciónDocument8 pagini33CSSP2-WC InstalaciónCamilo Rivera CalquinÎncă nu există evaluări
- Calculo de DuctosDocument25 paginiCalculo de DuctosEulogio PerazaÎncă nu există evaluări
- Fund - Matematicos y Calculo FinancieroDocument41 paginiFund - Matematicos y Calculo FinancieroPineda JesusÎncă nu există evaluări
- CT 331 - SDocument4 paginiCT 331 - SLuis Carlos Hernandez TuteÎncă nu există evaluări
- Cronograma GantDocument41 paginiCronograma GantWendy Romero MendietaÎncă nu există evaluări
- AlbanileriaDocument7 paginiAlbanileriahenrxxxÎncă nu există evaluări
- Diseño Muro de Contención C.CDocument35 paginiDiseño Muro de Contención C.CMatias DelgadoÎncă nu există evaluări
- Lineas TC Archivo 19 Catalogo+Operativo+11Document292 paginiLineas TC Archivo 19 Catalogo+Operativo+11VEMATELÎncă nu există evaluări
- POSTEDocument12 paginiPOSTECarlosAndresLemusGuerraÎncă nu există evaluări
- Seminario Accionamiento Eléctrico Parte 1Document76 paginiSeminario Accionamiento Eléctrico Parte 1Anonymous bDl76usdvaÎncă nu există evaluări
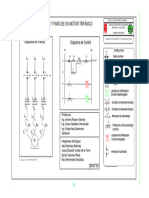
- Arranque y P Del Motor TrifasicoDocument1 paginăArranque y P Del Motor TrifasicoALEXIS FERNANDEZÎncă nu există evaluări
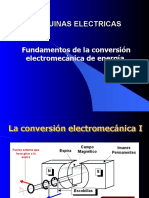
- Maquinas ElectricasDocument29 paginiMaquinas ElectricasLuz Milagros Follegatti RomeroÎncă nu există evaluări
- Catalogo de BisagrasDocument12 paginiCatalogo de BisagrascasalasÎncă nu există evaluări
- Indice Costos Construdata 185Document8 paginiIndice Costos Construdata 185Danilo UrruchurtoÎncă nu există evaluări
- Albañilería Confinada - Sistema Constructivo AporticadoDocument7 paginiAlbañilería Confinada - Sistema Constructivo Aporticadomikamansi1209Încă nu există evaluări
- Ec Nte 2120 1998Document10 paginiEc Nte 2120 1998Juan SaÎncă nu există evaluări
- AS-BUILT Enramadas Cerrejon JARRARALU UltimoDocument1 paginăAS-BUILT Enramadas Cerrejon JARRARALU UltimoMariconchy De luqueÎncă nu există evaluări
- Arquitectura-Detalles A1Document1 paginăArquitectura-Detalles A1Walter JhoelÎncă nu există evaluări
- Studylib Es Doc 322846 Preguntas de Adjetivos Cuantifique Los Adjetivos CalificaDocument6 paginiStudylib Es Doc 322846 Preguntas de Adjetivos Cuantifique Los Adjetivos CalificaWilman GomezÎncă nu există evaluări
- Museo de Las ArtesDocument14 paginiMuseo de Las ArtesJorge PereiraÎncă nu există evaluări
- Autotransformadores EléctricosDocument22 paginiAutotransformadores EléctricosCristhian Hans Apaza AriasÎncă nu există evaluări
- Itm-Lista de Precios 2016Document141 paginiItm-Lista de Precios 2016Emilio Tito IncaÎncă nu există evaluări
- Cubiertas InclinadasDocument3 paginiCubiertas InclinadasCain Puelles ChavezÎncă nu există evaluări
- Cronogra Gannt Coliseo N HorizonteDocument16 paginiCronogra Gannt Coliseo N HorizonteMarcoMejiaÎncă nu există evaluări
- Celasa - Septiembre 2019 PDFDocument16 paginiCelasa - Septiembre 2019 PDFAllan FernandoÎncă nu există evaluări
- Verbos IrregularesDocument4 paginiVerbos IrregularesLizaÎncă nu există evaluări
- Dormitorioceci27 180612190331Document48 paginiDormitorioceci27 180612190331Fabian MedinaÎncă nu există evaluări
- Regularizacion EETTDocument5 paginiRegularizacion EETTNatalia ValenzuelaÎncă nu există evaluări
- Diagrama Unilineal CCM-01Document1 paginăDiagrama Unilineal CCM-01Pablo InzunzaÎncă nu există evaluări
- Prove Edo ResDocument22 paginiProve Edo ResMarco Antonio Soto PradoÎncă nu există evaluări
- AccesoriosDocument19 paginiAccesoriosS.G. D. AlexÎncă nu există evaluări
- Motores - Arranque MTR - MedinaDocument86 paginiMotores - Arranque MTR - MedinaAlex CA100% (1)