S-ar putea să vă placă și
- EMT Electromagnetic Theory MODULE IDocument191 paginiEMT Electromagnetic Theory MODULE IARAVIND100% (1)
- Phys102 161 Second MajorDocument10 paginiPhys102 161 Second MajorAvneet Singh AroraÎncă nu există evaluări
- Semester EMW-1 Electromagnetic Wave SemesterDocument21 paginiSemester EMW-1 Electromagnetic Wave SemesterVinod MehtaÎncă nu există evaluări
- Antenna-lect5Document14 paginiAntenna-lect5fadwaalhadereeÎncă nu există evaluări
- r059210204 Electromagnetic FieldsDocument8 paginir059210204 Electromagnetic FieldsSrinivasa Rao GÎncă nu există evaluări
- r050211001 Electromagnetic Waves and Transmission LinesDocument8 paginir050211001 Electromagnetic Waves and Transmission LinesSrinivasa Rao GÎncă nu există evaluări
- Emf 7Document8 paginiEmf 729viswa12Încă nu există evaluări
- Waves and Transmission LinesDocument8 paginiWaves and Transmission LinesetitahÎncă nu există evaluări
- Antenna LecDocument29 paginiAntenna Lecjosesag518Încă nu există evaluări
- r05220404 Electromagnetic Waves and Transmission LinesDocument8 paginir05220404 Electromagnetic Waves and Transmission LinesSrinivasa Rao G100% (1)
- Unit 1 ElectrostaticsDocument98 paginiUnit 1 Electrostaticsmuthoju sandeepÎncă nu există evaluări
- EELE 3332 – Electromagnetic II: Waveguide FundamentalsDocument38 paginiEELE 3332 – Electromagnetic II: Waveguide FundamentalsVigneshwar DhavamaniÎncă nu există evaluări
- 07a4ec10-Em Waves and Transmission LinesDocument5 pagini07a4ec10-Em Waves and Transmission LinesSRINIVASA RAO GANTAÎncă nu există evaluări
- Antenna-lect3Document15 paginiAntenna-lect3fadwaalhadereeÎncă nu există evaluări
- Effective Length and Area of AntennasDocument10 paginiEffective Length and Area of AntennasMike DhakarÎncă nu există evaluări
- EEE 498/598 Uniform Plane Wave SolutionsDocument63 paginiEEE 498/598 Uniform Plane Wave SolutionsSonia KanwalÎncă nu există evaluări
- 9A04406 Electromagnetic Theory and Transmission LinesDocument4 pagini9A04406 Electromagnetic Theory and Transmission LinessivabharathamurthyÎncă nu există evaluări
- Cavity resonator equivalent to LC circuitDocument9 paginiCavity resonator equivalent to LC circuitzohaibÎncă nu există evaluări
- Antenna LecDocument31 paginiAntenna Lecjosesag518Încă nu există evaluări
- Solid Angle and Beam Area FundamentalsDocument5 paginiSolid Angle and Beam Area FundamentalsShehryar HumayunÎncă nu există evaluări
- R5210205-Electromagnetic FieldsDocument4 paginiR5210205-Electromagnetic FieldssivabharathamurthyÎncă nu există evaluări
- Overview of Uniform Plane Waves and Maxwells EquationDocument48 paginiOverview of Uniform Plane Waves and Maxwells EquationAkshay BharadwajÎncă nu există evaluări
- EM Waves and Transmission Lines Exam QuestionsDocument6 paginiEM Waves and Transmission Lines Exam QuestionsvengalamahenderÎncă nu există evaluări
- TX Lines & Antennas (2016503) : Exercises On Array AntennasDocument1 paginăTX Lines & Antennas (2016503) : Exercises On Array AntennaswaytelaÎncă nu există evaluări
- Helical AntennaDocument24 paginiHelical AntennaPrisha SinghaniaÎncă nu există evaluări
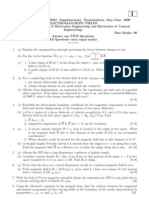
- R07 Set No. 2: Ii B.Tech Ii Sem-Regular/Supplementary Examinations May - 2010Document5 paginiR07 Set No. 2: Ii B.Tech Ii Sem-Regular/Supplementary Examinations May - 2010Mohan KumarÎncă nu există evaluări
- Electrostatic Boundary-Value ProblemsDocument42 paginiElectrostatic Boundary-Value Problemsrami wahshehÎncă nu există evaluări
- Magnetic Forces, Materials, and DevicesDocument48 paginiMagnetic Forces, Materials, and Devicesrami wahshehÎncă nu există evaluări
- Mutual Coupling in Antenna ArraysDocument48 paginiMutual Coupling in Antenna ArrayshomeiraÎncă nu există evaluări
- Lect9 PDFDocument45 paginiLect9 PDFKfkf FrankyÎncă nu există evaluări
- Chapter-2 Emf by SadiqueDocument35 paginiChapter-2 Emf by SadiqueAnonymous 4bUl7jzGqÎncă nu există evaluări
- 9a04406 Electromagnetic Theory Transmission LinesDocument4 pagini9a04406 Electromagnetic Theory Transmission LinesSyarina MaatÎncă nu există evaluări
- Antenna Chapter 2 Ver STDDocument66 paginiAntenna Chapter 2 Ver STDAreen ZakarnehÎncă nu există evaluări
- Method of Separation of Variables for Solving Boundary Value ProblemsDocument17 paginiMethod of Separation of Variables for Solving Boundary Value ProblemsSahil ChadhaÎncă nu există evaluări
- Ekt 241-4-MagnetostaticsDocument51 paginiEkt 241-4-MagnetostaticsfroydÎncă nu există evaluări
- Chapter 9 Guided Electromagnetic WavesDocument72 paginiChapter 9 Guided Electromagnetic WavesWERASIDOTÎncă nu există evaluări
- 1.AWP IntroductionDocument57 pagini1.AWP IntroductionvaishnavireddyÎncă nu există evaluări
- Transmission LinesDocument15 paginiTransmission LinesTalitha Cumi CruzÎncă nu există evaluări
- Ekt 241-1-IntroductionDocument31 paginiEkt 241-1-IntroductionfroydÎncă nu există evaluări
- Chapter 6 Metallic Waveguide and Cavity ResonatorsDocument34 paginiChapter 6 Metallic Waveguide and Cavity ResonatorsRasheed Mohammed AbdulÎncă nu există evaluări
- Physics QuizzesDocument11 paginiPhysics QuizzesFebrina Nathasya TobingÎncă nu există evaluări
- Lab 02 - Measurement of Microwave Power-SignedDocument4 paginiLab 02 - Measurement of Microwave Power-SignedMirbaz PathanÎncă nu există evaluări
- r05220404 Electromagnetic Waves and Transmission LinesDocument8 paginir05220404 Electromagnetic Waves and Transmission LinesSRINIVASA RAO GANTAÎncă nu există evaluări
- Introduction and Vector AlgebraDocument166 paginiIntroduction and Vector Algebra357911Încă nu există evaluări
- Experiment 1Document12 paginiExperiment 1Ashish Meena100% (1)
- Electromagnetic Waves and Transmission Lines Question PaperDocument8 paginiElectromagnetic Waves and Transmission Lines Question PaperelimelekÎncă nu există evaluări
- Radiation From An Oscillating Electric DipoleDocument15 paginiRadiation From An Oscillating Electric DipoleRayan Nezar100% (1)
- Signals and Systems QuestionsDocument16 paginiSignals and Systems QuestionsVishal KumarÎncă nu există evaluări
- 095866Document9 pagini095866Ashok KumarÎncă nu există evaluări
- Electromagnetics Part 10Document60 paginiElectromagnetics Part 10Charize Angeli Lumidao - MagdaelÎncă nu există evaluări
- Chapter 5 AIDocument40 paginiChapter 5 AInebiyutora566Încă nu există evaluări
- rr220403 e M Waves and Transmission LinesDocument8 paginirr220403 e M Waves and Transmission LinesSRINIVASA RAO GANTAÎncă nu există evaluări
- EMT LecturesDocument105 paginiEMT LecturessolantegÎncă nu există evaluări
- Electro Magnetic Field Theory - Chapter1Document35 paginiElectro Magnetic Field Theory - Chapter1Rave KingX100% (1)
- Lecture Notes - Week 1Document31 paginiLecture Notes - Week 1Nawin RaÎncă nu există evaluări
- Fizik 101 Ders Notları Vektörler ve Hareket HakkındaDocument53 paginiFizik 101 Ders Notları Vektörler ve Hareket Hakkındacpawan_699508Încă nu există evaluări
- Mechanics Notes on Physics 245Document117 paginiMechanics Notes on Physics 245fuckitÎncă nu există evaluări
- Matematika Teknik Kimia I: Siswo SumardionoDocument28 paginiMatematika Teknik Kimia I: Siswo SumardionodakrezniaÎncă nu există evaluări
- Chapter 3:vectors Scalars and VectorsDocument7 paginiChapter 3:vectors Scalars and VectorsKAMAL KANT KUSHWAHAÎncă nu există evaluări
- Activity No6Document16 paginiActivity No6tearsomeÎncă nu există evaluări
- Aptitude TestDocument1 paginăAptitude TesttearsomeÎncă nu există evaluări
- To Start Press The BIG BLUE Button: Mainly Used in The IT Sector This Test Is Solved in Around 15mins (In Japan)Document2 paginiTo Start Press The BIG BLUE Button: Mainly Used in The IT Sector This Test Is Solved in Around 15mins (In Japan)tearsomeÎncă nu există evaluări
- Republic Act No. 10175: "Cybercrime Prevention Act of 2012Document50 paginiRepublic Act No. 10175: "Cybercrime Prevention Act of 2012tearsomeÎncă nu există evaluări
- Resistor Color Code: ObjectiveDocument4 paginiResistor Color Code: ObjectivetearsomeÎncă nu există evaluări
- Republic Act No. 10175: "Cybercrime Prevention Act of 2012Document50 paginiRepublic Act No. 10175: "Cybercrime Prevention Act of 2012tearsomeÎncă nu există evaluări
- ATMEL and PIC MicrocontrollerDocument25 paginiATMEL and PIC MicrocontrollertearsomeÎncă nu există evaluări
- QuotesDocument1 paginăQuotestearsomeÎncă nu există evaluări
- 4-5 Hot Carrier Injection PrincipleDocument2 pagini4-5 Hot Carrier Injection PrincipletearsomeÎncă nu există evaluări
- ATMEL and PIC MicrocontrollerDocument25 paginiATMEL and PIC MicrocontrollertearsomeÎncă nu există evaluări
- CertificateDocument1 paginăCertificatetearsomeÎncă nu există evaluări
- Masonic PrayerDocument5 paginiMasonic PrayertearsomeÎncă nu există evaluări
- Grace SpeechDocument1 paginăGrace SpeechtearsomeÎncă nu există evaluări
- You and IDocument4 paginiYou and ItearsomeÎncă nu există evaluări
- Presentation 1Document1 paginăPresentation 1tearsomeÎncă nu există evaluări
- PhysicsDocument35 paginiPhysicstearsomeÎncă nu există evaluări
- Prelim Lab ExamDocument1 paginăPrelim Lab ExamtearsomeÎncă nu există evaluări
- Phone Ring IndicatorDocument1 paginăPhone Ring IndicatortearsomeÎncă nu există evaluări
- PhysicsDocument35 paginiPhysicstearsomeÎncă nu există evaluări
- PhysicsDocument35 paginiPhysicstearsomeÎncă nu există evaluări
- ATMEL and PIC MicrocontrollerDocument25 paginiATMEL and PIC MicrocontrollertearsomeÎncă nu există evaluări
- Requirements For The ProjectDocument1 paginăRequirements For The ProjecttearsomeÎncă nu există evaluări
- Xmas CarolDocument1 paginăXmas CaroltearsomeÎncă nu există evaluări
- Requirements For The ProjectDocument1 paginăRequirements For The ProjecttearsomeÎncă nu există evaluări
- ATMEL and PIC MicrocontrollerDocument25 paginiATMEL and PIC MicrocontrollertearsomeÎncă nu există evaluări
- Take TimeDocument1 paginăTake TimetearsomeÎncă nu există evaluări
- PLC Midterm Quiz SolutionsDocument1 paginăPLC Midterm Quiz SolutionstearsomeÎncă nu există evaluări
- QuotesDocument1 paginăQuotestearsomeÎncă nu există evaluări
- QuotesDocument1 paginăQuotestearsomeÎncă nu există evaluări
- Cbse 21 SQP - by O.P. GuptaDocument38 paginiCbse 21 SQP - by O.P. GuptaSREE GANESHÎncă nu există evaluări
- NIMCET 2023 Original Paper INPS ClassesDocument34 paginiNIMCET 2023 Original Paper INPS Classessajot62758Încă nu există evaluări
- Vladimir Gordin (Author) - Mathematical Problems and Methods of Hydrodynamic Weather Forecasting (2000, CRC Press) (10.1201 - 9781482287417) - Libgen - LiDocument843 paginiVladimir Gordin (Author) - Mathematical Problems and Methods of Hydrodynamic Weather Forecasting (2000, CRC Press) (10.1201 - 9781482287417) - Libgen - LiLibrarian BUASCÎncă nu există evaluări
- A. Find The Coordinates of All Maximum and Minimum Points On The Given Interval. Justify YourDocument6 paginiA. Find The Coordinates of All Maximum and Minimum Points On The Given Interval. Justify YourLara VillanuevaÎncă nu există evaluări
- Tut 1Document4 paginiTut 1Loc TranÎncă nu există evaluări
- Beam Analysis & Design Formula (WSD & USD Method) PDFDocument5 paginiBeam Analysis & Design Formula (WSD & USD Method) PDFAbdul QuaderÎncă nu există evaluări
- 01a - Course Outline of BS and MSC Mathematics Only For Fall 2020Document37 pagini01a - Course Outline of BS and MSC Mathematics Only For Fall 2020zaheer abbasÎncă nu există evaluări
- Module 2 in College and Advance AlgebraDocument9 paginiModule 2 in College and Advance AlgebraJaycel NepalÎncă nu există evaluări
- A Survey On The Dai-Liao Family of Nonlinear Conjugate Gradient MethodsDocument16 paginiA Survey On The Dai-Liao Family of Nonlinear Conjugate Gradient Methodsهشام محمد خضرÎncă nu există evaluări
- Winmax NC Programming: Application NoteDocument2 paginiWinmax NC Programming: Application NoteAnonymous PJP78mSxÎncă nu există evaluări
- Acs Lab Record 21 OriginalDocument64 paginiAcs Lab Record 21 OriginalBomma DineshÎncă nu există evaluări
- Melcs in MathDocument6 paginiMelcs in MathJudy Ann FunitÎncă nu există evaluări
- Fourier Transform Review: Key Properties and ApplicationsDocument6 paginiFourier Transform Review: Key Properties and Applicationsanoop.egÎncă nu există evaluări
- Discontinuous Functions GuideDocument4 paginiDiscontinuous Functions GuidekeirolyÎncă nu există evaluări
- Unit 1Document86 paginiUnit 1aero designÎncă nu există evaluări
- Unit 2 Review QuadraticsDocument5 paginiUnit 2 Review QuadraticsTeegin HackerÎncă nu există evaluări
- BSC - Maths - 2012 Syllabus OnwardsDocument63 paginiBSC - Maths - 2012 Syllabus OnwardsJothi KumarÎncă nu există evaluări
- 1 Asymptotic Notation - Algorithms (Series Lecture)Document35 pagini1 Asymptotic Notation - Algorithms (Series Lecture)turjo987Încă nu există evaluări
- Exam 02: Chapters 04 and 05: NstructionsDocument7 paginiExam 02: Chapters 04 and 05: NstructionsRonaldcito Eduardo Portocarrero HoyoÎncă nu există evaluări
- Maxima-5 15Document876 paginiMaxima-5 15Stefano MilaniÎncă nu există evaluări
- I.S.F.D y T. #103: Profesorado de Técnicos Prof: Martín MellerDocument11 paginiI.S.F.D y T. #103: Profesorado de Técnicos Prof: Martín MellerAriel LeucipoÎncă nu există evaluări
- Mobile Robots & Kinematics: Session 2: Nicol As Ilich Samus February 27, 2014Document5 paginiMobile Robots & Kinematics: Session 2: Nicol As Ilich Samus February 27, 2014Nicolás Ilich SamusÎncă nu există evaluări
- Exam 2 Cheat SheetDocument3 paginiExam 2 Cheat SheetMac JonesÎncă nu există evaluări
- Mdof S - A M: in Many Engineering Problems It Is Required To Quickly Estimate The First (Fundamental) Natural FrequencyDocument31 paginiMdof S - A M: in Many Engineering Problems It Is Required To Quickly Estimate The First (Fundamental) Natural Frequencyjawad khalidÎncă nu există evaluări
- Week 10 - Algebraic Expressions-Division (1.9)Document8 paginiWeek 10 - Algebraic Expressions-Division (1.9)shaniya12thomas34Încă nu există evaluări
- Nucl - Phys.B v.603Document578 paginiNucl - Phys.B v.603buddy72Încă nu există evaluări
- Unconstrained Optimization Methods: Amirkabir University of Technology Dr. MadadiDocument10 paginiUnconstrained Optimization Methods: Amirkabir University of Technology Dr. MadadissÎncă nu există evaluări
- Zone A 2010 - Add Maths Paper 1Document16 paginiZone A 2010 - Add Maths Paper 1smskplahÎncă nu există evaluări
- A Note On The Generalization of The Mean Value TheoremDocument3 paginiA Note On The Generalization of The Mean Value TheoremEditor IJTSRDÎncă nu există evaluări
- Introduction To Statistics and Data Analysis - 5Document26 paginiIntroduction To Statistics and Data Analysis - 5DanielaPulidoLunaÎncă nu există evaluări