Documente Academic
Documente Profesional
Documente Cultură
Meccanica Del Volo
Încărcat de
Fabrizio GiuliettiTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Meccanica Del Volo
Încărcat de
Fabrizio GiuliettiDrepturi de autor:
Formate disponibile
Lezioni di Meccanica del Volo
Le Prestazioni dei Velivoli
Fabrizio Giulietti
iii
Prefazione
Nel presente volume sono esposti, limitatamente alla parte relativa alle pre-
stazioni dei velivoli, i concetti fondamentali inseriti nel programma dellin-
segnamento di Meccanica del Volo del corso di laurea in Ingegneria Aero-
spaziale dellUniversit` a di Bologna.
La scelta di separare in due diversi volumi la parte relativa alle prestazioni
dalla parte di stabilit` a e controllo `e legata alla volont` a dellautore di mettere
in evidenza le dierenze concettuali che stanno alla base delle due classi di
argomenti: per le prestazioni infatti si utilizza, imponendo lipotesi di veli-
volo come punto materiale, un modello matematico semplicato basato solo
sullequazione delle forze, mentre per i concetti di stabilit` a e controllo `e ne-
cessario introdurre la dinamica rotazionale e quindi lequazione dei momenti.
Il libro chiaramente non ha la pretesa di rappresentare una trattazione com-
pleta della materia: sono stati arontati con maggiore dettaglio quegli argo-
menti ritenuti fondamentali per la formazione di un ingegnere aerospaziale,
tralasciando tuttavia per motivi di spazio, altri importanti aspetti. Il lettore
che volesse di propria iniziativa approfondire gli argomenti trattati pu` o fare
riferimento ai testi citati in bibliograa, ai quali il libro si ispira sia per la
scelta degli argomenti sia per lordine di presentazione.
Trattandosi della prima esperienza dellautore `e possibile che siano presenti
degli errori nel testo; desidero ringraziare sin da subito i lettori che vorranno
segnalare eventuali imprecisioni (ma anche critiche e suggerimenti) contat-
tandomi attraverso il mio indirizzo di posta elettronica:
fabrizio.giulietti@unibo.it.
Tra tutte le persone che hanno contribuito alla realizzazione del libro desi-
dero ringraziare in modo particolare il prof. Paolo Poggiolini dell ITAer di
Forl` per i preziosi suggerimenti ed il prof. Carlo Casarosa dellUniversit` a di
Pisa, le cui dispense sono state il mio pane quotidiano prima da studente e
poi da ricercatore. Un sentito ringraziamento va inne allo studente Antonio
Segalini per la cura con cui ha realizzato le gure.
Fabrizio Giulietti, Forl` 18 Aprile 2006
Indice
v
Elenco delle gure
vii
Capitolo 1
Caratteristiche
dellatmosfera
Le azioni che si sviluppano dallinterazione tra un uido ed un corpo in mo-
vimento sono strettamente legate alle propriet` a del uido attraverso il quale
si muove il corpo stesso.
Il mezzo in cui si muove un velivolo `e latmosfera terrestre, ossia una miscela
non omogenea di gas (principalmente ossigeno, azoto e anidride carbonica),
vapori e polveri. La densit` a e la composizione di tale miscela varia maggior-
mente con la quota, ma anche col tempo (sia secondo le ore della giornata
sia con le stagioni), con le condizioni meteorologiche, con la localit` a e con la
latitudine.
Appare dunque chiaro che, ai ni della modellazione delle azioni aerodina-
miche e quindi di una accurata valutazione delle prestazioni del velivolo, `e
necessario un modello matematico che fornisca le caratteristiche dellatmo-
sfera con una opportuna precisione. E necessario, in altre parole, conoscere
le leggi che descrivono in funzione dello spazio e del tempo landamento delle
seguenti grandezze:
p(P, t) pressione, Pa
(P, t) densit` a, kg/m
3
T(P, t) temperatura, K
dove P `e un generico dello spazio.
1
2 CAPITOLO 1. CARATTERISTICHE DELLATMOSFERA
1.1 Atmosfera standard
Per tutte le problematiche relative al volo atmosferico si utilizza un modello
unicato, noto in letteratura come atmosfera standard (ISA), in cui le tre
grandezze siche variano secondo leggi matematiche ricavate a partire dalle
seguenti ipotesi:
1. Latmosfera si considera congelata. Si ipotizza cio`e che le variazioni
delle grandezze avvengono in tempi che sono molto lunghi rispetto al
tempo di attraversamento del velivolo della zona interessata. In pratica
la pressione, la densit` a e la temperatura non dipendono dal tempo.
2. Laria `e considerata come una miscela di gas perfetti. Il legame tra le
grandezze siche `e descritto dalla nota legge
p = RT (1.1)
dove R=287 J/kg K `e la costante specica dellaria e 1 J = 1 mN =
0.239 cal. Lunit` a di misura della pressione atmosferica `e il Pascal:
1 Pa = 1 N/m
2
= 0.01 mbar = 1.4510
4
psi.
3. Latmosfera `e soggetta alla legge di Stevino. Vale quindi la seguente
relazione:
dp = g dh (1.2)
dove g = 9.806 m/s
2
, `e laccelerazione di gravit` a calcolata ad una
latitudine media.
4. Il legame tra la temperatura e la quota (legge di Toussaint) `e lineare
del tipo:
T = T
0
+
dT
dh
h (1.3)
e questa ipotesi rappresenta la maggiore causa di deviazione del mo-
dello di atmosfera standard rispetto alla realt` a.
La tabella ?? riporta valori del gradiente di temperatura, T
h
= dT/dh,
per quattro diverse regioni dellatmosfera terrestre.
Poiche si hanno quattro grandezze siche (p, , T, h) e tre relazioni, una volta
noto il valore di una grandezza `e possibile risalire alle altre tre attraverso le
relazioni (??), (??) e (??). In particolare, in ogni problema di meccanica del
volo atmosferico, data la quota si ricavano i valori di temperatura, pressione
1.1. ATMOSFERA STANDARD 3
Quota, h, km Gradiente di temperatura, T
h
, K/m
0 h 11 6.510
3
11 h 20 0
20 h 32 110
3
32 h 47 2.810
3
Tabella 1.1: Valori del gradiente di temperatura
e densit` a.
Al livello del mare (sea level, SL) si ha:
p
0
= 101 325 Pa (1.4)
T
0
= 288.16 K (1.5)
0
= 1.225 kg/m
3
(1.6)
Allaumentare della quota le altre grandezze siche variano secondo le leggi
descritte di seguito, [?]:
1. Troposfera: valori della quota no a 11000 m:
p = p
0
_
1 +
T
h
T
0
h
_ g
RT
h
(1.7)
=
p
RT
=
0
_
1 +
T
h
T
0
h
_ g
RT
h
1
(1.8)
T = T
0
+T
h
h = T
0
_
1 +
T
h
T
0
h
_
(1.9)
Dalle precedenti relazioni risulta chiaro come per valori della quota
minori di 11000 m, la pressione, p, la densit` a, , e la temperatura, T,
diminuiscono allaumentare della quota, h.
4 CAPITOLO 1. CARATTERISTICHE DELLATMOSFERA
2. Tropopausa: valori della quota compresi tra 11000 e 20000 m:
p = p
11
e
g
RT
11
(h11000)
(1.10)
=
p
RT
=
11
e
g
RT
11
(h11000)
(1.11)
T = T
11
= 216.66 K (1.12)
p
11
= 22631.7 Pa (1.13)
11
= 0.3639 kg/m
3
(1.14)
3. Stratosfera: valori della quota compresi tra 20000 e 32000 m:
p = p
20
_
1 +
T
h
T
20
(h 20000)
_ g
RT
h
(1.15)
=
p
RT
=
20
_
1 +
T
h
T
20
(h 20000)
_ g
RT
h
1
(1.16)
T = T
20
_
1 +
T
h
T
20
(h 20000)
_
(1.17)
T
20
= 216.66 K (1.18)
p
20
= 5474.72 Pa (1.19)
20
= 0.08803 kg/m
3
(1.20)
4. Alta stratosfera: valori della quota compresi tra 32000 e 47000 m:
p = p
32
_
1 +
T
h
T
32
(h 32000)
_ g
RT
h
(1.21)
=
p
RT
=
32
_
1 +
T
h
T
32
(h 32000)
_ g
RT
h
1
(1.22)
T = T
32
_
1 +
T
h
T
32
(h 32000)
_
(1.23)
T
32
= 228.66 K (1.24)
p
32
= 867.98 Pa (1.25)
32
= 0.01322 kg/m
3
(1.26)
Le caratteristiche dellatmosfera standard per le principali quote operati-
ve (generalmente comprese nella troposfera) dei velivolo sono riassunte in
tabella ??.
1.1. ATMOSFERA STANDARD 5
Quota, h, m Temperatura, T, K Pressione, p, Pa Densit` a, , kg/m
3
0 288.15 101325 1.2250
500 284.90 98357 1.1959
1000 281.65 89874 1.1116
1500 278.40 84556 1.0581
2000 275.15 79495 1.0065
2500 271.90 74682 0.9569
3000 268.65 70108 0.9091
3500 265.40 65764 0.8632
4000 262.15 61640 0.8191
4500 258.90 57728 0.7768
5000 255.65 54020 0.7361
5500 252.40 50507 0.6971
6000 249.15 47181 0.6597
6500 245.90 44035 0.6238
7000 242.65 41061 0.5895
7500 239.40 38251 0.5566
8000 236.15 35600 0.5252
8500 232.90 33099 0.4951
9000 229.65 30742 0.4663
9500 226.40 28524 0.4389
10000 222.15 26199 0.4107
10500 219.90 24474 0.3877
11000 216.65 22632 0.3639
11500 216.65 20916 0.3363
12000 216.65 19330 0.3108
13000 216.65 16510 0.2655
14000 216.65 14101 0.2268
15000 216.65 12044 0.1937
Tabella 1.2: Caratteristiche dellatmosfera standard al variare della quota
Capitolo 2
Modello matematico del
velivolo
La modellazione matematica `e senza dubbio lo strumento teorico principale
per la valutazione delle prestazioni di un velivolo. I modelli matematici sono
generalmente costituiti da un insieme di equazioni dierenziali ed algebriche
nelle quali sono evidenziate le dipendenze dai parametri geometrici, inerziali
e aerodinamici del velivolo.
In questo capitolo vengono prima introdotti i principali sistemi di riferimento
utilizzati nella meccanica del volo; successivamente viene ricavato il modello
matematico, utilizzato per tutto il resto della trattazione, introducendo le
ipotesi fondamentali di a) velivolo come corpo rigido e b) velivolo come punto
materiale.
2.1 Sistemi di Riferimento
Per poter applicare le equazioni della meccanica `e innanzi tutto necessario
denire un sistema di riferimento inerziale. Inoltre, in tutti i problemi di
meccanica del volo (sia atmosferico che spaziale) `e utile, ai ni di semplica-
re le equazioni del moto, introdurre delle terne locali solidali con il velivolo.
Tutti i sistemi di riferimento utilizzati nella presente trattazione sono co-
stituiti da terne destrorse di assi ortogonali, [?]: F
i
(O
i
; x
i
, y
i
, z
i
). I tre ver-
sori degli assi di ciascuna terna si indicano con i
i
, j
i
, k
i
, mentre lorigine `e
indicata con O
i
.
7
8 CAPITOLO 2. MODELLO MATEMATICO DEL VELIVOLO
2.1.1 Sistema di riferimento Geocentrico-Equatoriale
F
I
(O
I
; x
I
, y
I
, z
I
), di versori i
I
, j
I
, k
I
. Ha lorigine coincidente col centro
della Terra, il piano x
I
O
I
y
I
coincidente col piano equatoriale e gli assi x
I
e z
I
puntanti, rispettivamente, nella direzione dellequinozio di primavera e
nella direzione del polo Nord. Questa terna, ssa nello spazio e non rotante
con la Terra, pu` o essere considerata un sistema di riferimento inerziale se a)
il movimento di precessione del piano equatoriale `e trascurabile e b) il moto
della Terra rispetto al Sole `e rettilineo uniforme. Per intervalli temporali di
alcune ore entrambe le ipotesi sono vericate.
2.1.2 Sistema di riferimento assi terrestri
F
E
(O
E
; x
E
, y
E
, z
E
), di versori i
E
, j
E
, k
E
. Ha lorigine ssata in un punto
della supercie della Terra ed il piano x
E
O
E
y
E
`e tangente ad essa. Lasse
z
E
`e diretto secondo la direzione del vettore gravit` a verso il centro della
terra, mentre lasse x
E
`e diretto verso il Nord geograco; conseguentemente
lasse y
E
`e diretto verso Est.
Il sistema assi terrestri, sotto lipotesi di Terra non rotante e per intervalli
temporali tali da supporre il moto di rivoluzione rettilineo uniforme, pu` o
considerarsi un riferimento inerziale ed `e usato comunemente nei problemi
di navigazione aerea.
2.1.3 Sistema di riferimento assi verticali locali
F
v
(O
v
; x
v
, y
v
, z
v
), di versori i
v
, j
v
, k
v
. Ha lorigine nel centro di massa del
velivolo, lasse x
v
`e diretto secondo la direzione orizzontale locale, lasse z
v
`e
orientato secondo il vettore gravit` a locale mentre lasse y
v
`e tale da rendere
destrorsa la terna. Il sistema di riferimento assi verticali locali, sotto le
ipotesi di terra piatta e non rotante pu` o essere considerato come un sistema
di riferimento inerziale; `e molto utilizzato nei problemi di dinamica del volo
dove i tempi dei transitori della manovre del velivolo sono brevi rispetto ai
moti di rotazione della terra attorno al proprio asse ed attorno al sole.
2.1.4 Sistema di riferimento assi vento
F
w
(O
w
; x
w
, y
w
, z
w
), di versori i
w
, j
w
, k
w
. Ha lorigine nel centro di massa
del velivolo, lasse x
w
`e diretto secondo il vettore velocit` a relativa allaria,
lasse y
w
`e orientato verso destra rispetto alla traiettoria del centro di massa,
2.2. EQUAZIONI DEL MOTO 9
mentre lasse z
w
`e tale da rendere destrorsa la terna.
E generalmente utilizzato come riferimento locale nei problemi di mecca-
nica del volo.
2.1.5 Sistema di riferimento assi corpo
F
b
(O
b
; x
b
, y
b
, z
b
), di versori i
b
, j
b
, k
b
. Ha lorigine nel centro di massa del
velivolo, lasse x
b
`e diretto secondo lasse di simmetria longitudinale del
velivolo, lasse `e y
b
diretto secondo la direzione della semiala destra, mentre
lasse z
b
`e tale da rendere destrorsa la terna.
E generalmente utilizzato come riferimento locale nei problemi di dinamica
del volo.
2.2 Equazioni del Moto
Lapproccio classico per ricavare il modello matematico consiste nel conside-
rare il velivolo come un corpo rigido libero nello spazio e soggetto ad azioni
esterne di natura a) aerodinamica, b) gravitazionale e c) propulsiva. In que-
sto contesto, la prima e la seconda equazione cardinale della meccanica del
corpo rigido, riferite ad un sistema inerziale, assumono la seguente struttura:
F = m
_
dV
dt
_
F
I
(2.1)
M =
_
dH
dt
_
F
I
(2.2)
dove con F e M si indicano le risultanti di forze e momenti applicati al ve-
livolo, mentre con V e H, la velocit` a del baricentro e il momento angolare.
Sebbene le precedenti equazioni presentino lindubbio vantaggio di una strut-
tura compatta, la modellazione matematica del velivolo in assi inerziali
risulta sconveniente per i seguenti motivi:
1. I coecienti della matrice dinerzia nel riferimento inerziale variano
mano a mano che il velivolo cambia la propria posizione; in un riferi-
mento solidale col centro di massa del velivolo mantengono un valore
costante.
10 CAPITOLO 2. MODELLO MATEMATICO DEL VELIVOLO
2. Le azioni aerodinamiche che si sviluppano durante il moto agiscono
lungo la direzione della velocit` a (resistenza) e lungo la normale alla
velocit` a (portanza).
Alla luce delle precedenti considerazioni risulta evidente che la modellazione
del velivolo, al prezzo di una struttura meno compatta, risulterebbe pi` u
agevole introducendo una terna locale con origine nel centro di massa del
velivolo.
Ricordando quindi il legame tra la derivata temporale di un generico vettore
P rispetto ad una riferimento sso e lanaloga derivata eettuata rispetto
ad un riferimento ruotante rispetto al primo con velocit` a angolare :
_
dP
dt
_
f
=
_
dP
dt
_
r
+P (2.3)
le equazioni (??) e (??) divengono:
F = m
_
V +V
_
(2.4)
e
M =
_
H +H
_
(2.5)
dove con
V e
H sono indicate le derivate temporali della velocit` a e del mo-
mento angolare rispetto alla terna ruotante. Chiaramente le espressioni di
forze e momenti assumono espressioni diverse a seconda del sistema di rife-
rimento adottato.
Si introduce ora la seconda ipotesi fondamentale per la modellazione mate-
matica: il velivolo come punto materiale, [?]. Uno dei principali scopi della
meccanica del volo `e infatti lo studio delle prestazioni dei velivoli lungo tra-
iettorie stazionarie e, per quei velivoli che soddisfano determinati requisiti di
stabilit` a, `e ragionevole supporre che il moto attorno al baricentro del velivolo,
innescato da una azione da parte del pilota o dalla turbolenza atmosferica,
si esaurisca in tempi tali da non inuenzare il moto del baricentro e quindi la
traiettoria del velivolo. Da ci` o consegue che la valutazione delle prestazioni
dei velivoli pu` o essere eettuata in modo soddisfacente considerando il solo
moto del baricentro, assimilando il velivolo ad un punto materiale, di massa
m pari alla massa del velivolo, libero di muoversi nello spazio soggetto a
forze di natura aerodinamica (portanza, L, e resistenza, D), gravitazionali
(il peso del velivolo, W = mg) e propulsive (la spinta dei motori, T).
2.2. EQUAZIONI DEL MOTO 11
Scegliendo come riferimento inerziale la terna assi terrestri F
E
e, per la se-
conda delle considerazioni fatte allinizio del paragrafo, la terna assi vento
F
w
come riferimento locale, lequazione delle forze (??) diviene:
F
w
= m
_
V
w
+
w
V
w
_
(2.6)
Il vettore V
w
=
_
V 0 0
T
, rappresenta la velocit` a rispetto allaria
mentre
w
=
_
_
z
_
_
w
=
_
_
sin
cos
_
_
(2.7)
`e la velocit` a di rotazione della terna assi vento rispetto alla terna inerziale,
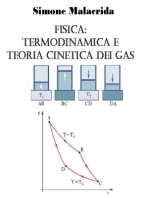
espressa nella terna assi vento. Langolo , formato dagli assi x
E
e x
w
nel piano verticale indica la pendenza della traiettoria mentre langolo ,
compreso tra gli stessi assi nel piano orizzontale, indica la direzione della prua
del velivolo. Langolo , compreso tra gli assi y
E
e y
w
nel piano verticale,
indica linclinazione laterale del velivolo ed `e noto come angolo di bank.
Il vettore delle forze esterne si ricava facilmente osservando la gura ??:
F
w
=
_
_
F
x
F
y
F
z
_
_
w
=
_
_
T D mg sin
Lsin
mg cos Lcos
_
_
(2.8)
Tenendo conto della (??), dalle equazioni (??) e (??) si ottiene:
m
_
_
V
V
V
_
_
=
_
_
T D mg sin
Lsin / cos
mg cos Lcos
_
_
(2.9)
Il modello matematico costituito delle (??) descrive il moto traslazionale del
velivolo nello spazio sotto lipotesi di velivolo identicato col suo centro di
massa e di velocit` a asintotica giacente nel piano di simmetria longitudinale
del velivolo. Il modello matematico viene inne completato dalle equazioni
della cinematica che esprimono la posizione del velivolo rispetto al sistema
di riferimento inerziale:
_
_
x
y
z
_
_
=
_
_
V cos cos
V cos sin
V sin
_
_
(2.10)
12 CAPITOLO 2. MODELLO MATEMATICO DEL VELIVOLO
Figura 2.1: Sistemi di riferimento ed azioni agenti sul velivolo
2.3 Il modello punto materiale: riassunto
Per lanalisi delle prestazioni del velivolo il modello matematico utilizzato `e
costituito dellinsieme delle seguenti equazioni dierenziali:
1. Moto del baricentro espresso nella terna assi vento:
V =
1
m
(T D mg sin )
=
1
mV
(Lcos mg cos )
=
1
mV
Lsin
cos
(2.11)
2.3. IL MODELLO PUNTO MATERIALE: RIASSUNTO 13
2. Posizione del centro di massa rispetto al riferimento inerziale:
x = V cos cos
y = V cos sin
z = V sin
(2.12)
Esse sono state ricavate sotto lipotesi di velivolo come punto materiale ed
esprimono il moto del centro di massa trascurando lequazione dei momenti.
Relativamente al moto attorno al baricentro ed alla relativa dinamica di
assetto, si rimanda il lettore alla consultazione di testi specici in cui viene
arontato, attraverso lanalisi dei transitori, lo studio delle caratteristiche di
dinamica e controllo del velivolo, [?, ?, ?].
Capitolo 3
La polare del velivolo
Si consideri un solido generico investito da una corrente uida avente velo-
cit` a V . Lanalisi del usso attorno al corpo permette di evidenziare il fatto
che le azioni aerodinamiche che si sviluppano sono dovute a due diversi con-
tributi: 1) la pressione che agisce in modo perpendicolare alla supercie e
2) lattrito viscoso allinterno dello strato limite. Sotto lipotesi che la com-
ponente normale delle azioni viscose sia trascurabile rispetto alla pressione,
lintegrale esteso a tutta la supercie fornisce la risultante R delle azioni
aerodinamiche:
R =
__
S
pndS +
__
S
k dS (3.1)
Tale risultante la cui direzione e modulo dipendono dalla geometria del so-
lido investito dalle caratteristiche della corrente uida, pu` o essre scomposta
in due componenti: 1) la prima perpendicolare alla direzione della velocit` a
del usso che si oppone alla forza peso e tende a sostenere il corpo, 2) laltra
parallela alla direzione della velocit` a che si oppone allavanzamento del corpo
stesso.
Si denisce portanza, L, la componente di R perpendicolare alla direzione
della velocit` a e resistenza, D, la componente parallela.
3.1 Aerodinamica dei Proli
Le precedenti considerazioni sono applicabili a tutti i solidi; in pratica ogni
corpo se opportunamente orientato in una corrente uida sviluppa una rea-
15
16 CAPITOLO 3. LA POLARE DEL VELIVOLO
zione aerodinamica, costituita da una componente di portanza, perpendi-
colare a V , che tende a sostenerlo ed una componente di resistenza che si
oppone allavanzamento.
Il rapporto tra la componente perpendicolare e la componente parallela di-
pende dalla forma del solido. Le prime geometrie studiate per la generazione
di forze portanti consistenti sono state la lastra piana e la lastra curva. Nes-
suna di queste geometrie ha tuttavia trovato applicazione nelle costruzioni
aeronautiche; il motivo va ricercato nel limitato spessore il quale non garan-
tisce ne una adeguata resistenza strutturale ed una funzione di contenimento
(serbatoi, attuatori delle superci mobili) ne un comportamento soddisfacen-
te al di fuori delle condizioni di progetto della lastra.
La ricerca della forma in grado di soddisfare i precedenti requisiti ha por-
tato al disegno di solidi aventi delle sezioni simili alle ali degli uccelli ed ai
corpi dei pesci: tali sezioni prendono il nome di proli aerodinamici, o pi` u
semplicemente proli.
3.1.1 Nomenclatura
La nomenclatura dei proli aerodinamici `e stata unicata a partire dal 1930
da NACA (National Advisory Committee for Aeronautics). Il principale ele-
mento da considerare nel progetto e nella scelta di un prolo `e la linea media
(camber line); essa `e denita come il luogo dei punti equidistanti dal ventre
e dal dorso del prolo. I punti di estremit` a anteriore e posteriore della linea
media sono detti bordo dattacco e bordo duscita rispettivamente.
Il segmento che unisce il bordo dattacco e il bordo duscita del prolo pren-
de il nome di corda aerodinamica, mentre lentit` a della curvatura del prolo
`e data dalla freccia, la quale `e denita come la massima distanza tra la cor-
da e la linea media. Inne lo spessore del prolo, denito come distanza
tra il dorso il ventre misurata perpendicolarmente alla corda, non viene ge-
neralmente espresso in termini assoluti ma come rapporto tra il suo valore
massimo e la corda del prolo:
t =
t
max
c
(3.2)
tale rapporto prende il nome di spessore percentuale ed `e utile per confron-
tare le caratteristiche di proli dierenti.
La grande importanza che le suddette caratteristiche rivestono relativamente
alla capacit` a di generare forza portante ha stimolato la ricerca aeronautica
3.1. AERODINAMICA DEI PROFILI 17
linea media
b
o
r
d
o
d
a
t
t
a
c
c
o
b
o
r
d
o
d
u
s
c
i
t
a
corda aerodinamica
freccia spessore
Figura 3.1: Caratteristiche di un prolo aerodinamico
nella progettazione di un numero di proli talmente elevato da richiederne
una classicazione, [?]. La principale classicazione dei proli `e quella ba-
sata sulla loro forma geometrica facendo riferimento prima alla forma del
ventre e poi quella del dorso. Si hanno quindi
proli concavo-convessi
proli piano convessi
proli biconvessi simmetrici
proli biconvessi asimmetrici
Ciascuna delle precedenti categorie di proli pu` o essere ulteriormente sud-
divisa in base allo spessore. Si arriva dunque a:
sottili (spessore percentuale < 0.08)
semispessi ( 0.08 <
t < 0.14 )
spessi (
t > 0.14)
Come regola generale la forma e lo spessore dei proli pu` o denirsi funzionale
alle velocit` a di utilizzo; per ottenere elevati valori di portanza alle basse
velocit` a sono indicati i proli concavo-convessi a forte spessore, mentre per
le alte velocit` a si adottano proli simmetrici o asimmetrici a basso spessore.
Le principali caratteristiche geometriche di un prolo aerodinamico sono
riportate in gura ??.
18 CAPITOLO 3. LA POLARE DEL VELIVOLO
3.1.2 Coecienti Aerodinamici
Le forze aerodinamiche sviluppate dal prolo dipendono dalleetto combi-
nato di diversi fattori. In particolare, esperienze in galleria del vento han-
no dimostrato che la forza risultante che si sviluppa attorno ad un prolo
di spessore dy immerso in una corrente uida dipende dalle seguenti sei
variabili:
1. modulo della velocit` a del usso, V
2. densit` a dell aria,
3. elemento di supercie, S = c dy
4. viscosit` a dellaria,
5. velocit` a del suono, a
6. angolo di incidenza,
E facile notare come il legame tra forza generata ed il usso dipende sia
alle caratteristiche del usso stesso che dalla geometria del prolo ed al ne
di trovare una forma generale per il suddetto legame si propone la seguente
analisi dimensionale attraverso il teorema di Buckingham. A partire dalle
precedenti variabili dimensionali si ricavano tre parametri adimensionali; il
primo di questi termini viene ricavato utilizzando V , S, e come variabili
ripetute:
1
= V
a
b
S
d
F (3.3)
in termini di unit` a fondamentali: lunghezza, l, tempo, t, e massa, m, la
precedente equazione pu` o scriversi:
Dim
1
=
_
[l]
[t]
_
a
_
[m]
[l]
3
_
b
_
[l]
2
_
d
_
[m][l]
[t]
2
_
(3.4)
Dato che il parametro
1
`e una quantit` a adimensionale, uguagliando le
potenze uguali delle unit` a l, t, e m si ottiene:
0 = a 3b + 2d + 1
0 = b + 1
0 = a 2
(3.5)
3.1. AERODINAMICA DEI PROFILI 19
risolvendo le precedenti equazioni per a, b, e d si trova che a = 2, b = 1,
e d = 1. Quindi:
1
=
F
V
2
S
(3.6)
Utilizzando lo stesso procedimento, il secondo parametro adimensionale pu` o
scriversi come:
2
= V
a
b
S
d
(3.7)
e quindi in termini di unit` a fondamentali:
Dim
2
=
_
[l]
[t]
_
a
_
[m]
[l]
3
_
b
_
[l]
2
_
d
_
[m]
[l][t]
_
(3.8)
uguagliando le potenze uguali delle unit` a l, t, e m si ottiene:
0 = a 3b + 2d 1
0 = b + 1
0 = a 1
(3.9)
risolvendo le precedenti equazioni per a, b, e d si trova che a = 1, b = 1,
e d = 1/2. Quindi:
2
=
V S
1/2
(3.10)
Si lascia al lettore la dimostrazione che:
3
=
a
V
(3.11)
In accordo con i precedenti risultati, la relazione adimensionale che mette
in relazione la forza aerodinamica con le sei variabili viste allinizio, pu` o
scriversi come:
F
V
2
S
= f
_
V S
1/2
,
a
V
,
_
(3.12)
E possibile sostituire il termine S
1/2
con una grandezza lineare, ad esempio
la corda del prolo c. Questo porta a scrivere la precedente relazione come:
F = V
2
S f (Re, M, ) (3.13)
dove
Re =
V c
(3.14)
20 CAPITOLO 3. LA POLARE DEL VELIVOLO
`e il numero di Reynolds, che tiene conto degli eetti della viscosit` a, mentre
M =
V
a
(3.15)
`e il numero di Mach e introduce gli eetti della comprimibilit` a del uido.
Per quanto riguarda la componente della risultante delle azioni aerodina-
miche perpendicolare alla velocit` a (portanza) `e utile introdurre la seguente
relazione dimensionale:
f (Re, M, ) =
c
l
2
(3.16)
che porta alla nota espressione:
L =
1
2
SV
2
c
l
(3.17)
Il parametro c
l
, chiamato coeciente di portanza del prolo, `e funzione del-
langolo di orientazione del prolo rispetto al usso, del numero di Reynolds e
del numero di Mach. Allo stesso modo `e possibile ricavare una espressione per
la componente della forza aerodinamica parallela alla velocit` a (resistenza):
D =
1
2
SV
2
c
d
(3.18)
Il parametro c
d
`e chiamato coeciente di resistenza del prolo, ed `e funzione
di , Re, e M.
Attraverso lanalisi dimensionale sono stati deniti i coecienti delle forze
aerodinamiche ed `e stata evidenziata la loro dipendenza dai parametri carat-
teristici del usso: , Re, e M. La trattazione tuttavia non pu` o certamente
ritenersi esaustiva di questo problema: lo scopo di questo paragrafo `e infat-
ti quello di fornire al lettore solamente dei cenni qualitativi, riportando le
principali dipendenze dei coecienti dalle caratteristiche del usso.
3.2 La polare dellala nita
I concetti introdotti nel precedente paragrafo sui coecienti aerodinamici
possono essere estesi allala isolata, introducendo il concetto di allungamento
alare. Si denisce allungamento alare di una qualsiasi supercie portante il
rapporto tra il quadrato dellapertura, b, e larea della supercie, S.
AR =
b
2
S
(3.19)
3.2. LA POLARE DELLALA FINITA 21
Noto il valore dellallungamento di unala, il relativo coeciente di portanza
pu` o scriversi, in prima approssimazione, come:
C
L
w
= c
l
AR
AR + 2
(3.20)
dove c
l
indica il coeciente di portanza del prolo scelto per realizzare lala.
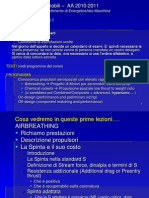
Landamento del coeciente di portanza di unala nita in funzione dellan-
golo di incidenza `e riportato in gura ??. E opportuno introdurre alcune
considerazioni:
1. Per proli non simmetrici, a causa della curvatura (generalmente verso
lalto per le superci di uso aeronautico) lincidenza di portanza nulla
si trova nella parte negativa dellasse delle ascisse. Lequazione (??)
diviene:
C
L
w
= c
l
0
+c
l
AR
AR + 2
(3.21)
2. La pendenza della curva C
L
w
= f() aumenta con AR, e lapprossi-
mazione data dalla (??) `e valida per valori di incidenza lontani dalla
condizione di stallo.
3. Il valore dellincidenza per cui si ha il massimo valore di C
L
w
`e chiamato
incidenza di stallo,
s
.
Il coeciente di resistenza viene invece espresso attraverso una relazione pa-
rabolica, nota in letteratura come polare dellala. Sebbene tale espressione
fornisca dei valori approssimati della resistenza, specialmente alle alte inci-
denze, la sua formulazione compatta permette la risoluzione in forma chiusa
di alcuni problemi utili a comprendere il legame tra ecienza aerodinamica
e prestazioni del velivolo.
Omettendo per semplicit` a il pedice w, si ha:
C
D
= C
D
min
+K (C
L
C
L
md
)
2
= C
D
0
K
1
C
L
+KC
L
2
(3.22)
dove
C
D
0
= C
D
min
+K C
L
2
md
(3.23)
Il parametro K, che per condizioni di volo lontane dalla soglia transonica
pu` o ritenersi costante, introduce il legame tra la resistenza aerodinamica e
la geometria dellala:
K =
1
ARe
(3.24)
22 CAPITOLO 3. LA POLARE DEL VELIVOLO
0
Angolo di incidenza,
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
0
Figura 3.2: Coeciente di portanza in funzione dellangolo di incidenza
Con e si indica il coeciente di Oswald, il quale tiene conto della forma in
pianta della supercie portante; per ali ellittiche vale 1, mentre per le ali
utilizzate nellaviazione generale (pianta rettangolare) e nei velivoli commer-
ciali (pianta trapezoidale) varia tra 0.75 e 0.85.
Il termine C
D
min
rappresenta invece il valore minimo della resistenza delala,
mentre il termine C
L
md
rappresenta il valore del coeciente di portanza per
cui si ottiene la minima resistenza. Nel caso particolare di ali simmetriche,
superci costituite da proli la cui linea media `e un segmento, il valore mi-
nimo di C
D
si ottiene per C
L
= 0, e vale C
D
0
= C
D
min
. In queste condizioni
la (??) assume la nota forma:
C
D
= C
D
0
+K C
L
2
(3.25)
Il termine C
D
0
prende il nome di coeciente di resistenza parassita ed `e
dato dalla somma dei contributi di resistenza di attrito e di forma, mentre il
3.2. LA POLARE DELLALA FINITA 23
Coefficiente di resistenza, C
D
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
ala simmetrica
ala con piccola curvatura
ala con forte curvatura
Figura 3.3: Polare dellala per diversi valori della curvatura
termine K C
L
2
rappresenta il contributo di resistenza indotta, ed `e stretta-
mente legato alla variazione locale di incidenza causata dal sistema di vortici
che si sviluppa allestremit` a di unala di allungamento nito.
La gura ?? riporta il graco della polare di unala nita per dierenti valori
della curvatura della linea media del prolo. Lo scostamento tra le tre curve,
dovuto ai dierenti valori di C
L
md
, tende a diminuire mano a mano che la
curvatura della linea media diminuisce e lala tende a divenire simmetrica.
E possibile ipotizzare quindi, per ali di moderata curvatura, C
D
0
C
D
min
ed utilizzare direttamente la (??) per descrivere il legame tra portanza e
resistenza.
24 CAPITOLO 3. LA POLARE DEL VELIVOLO
Coefficiente di resistenza, C
D
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
ala isolata
ala + fusoliera
velivolo completo
Figura 3.4: Eetti della fusoliera e delle superci sulla polare
3.3 La Polare del Velivolo Completo
I coecienti di portanza e resistenza del velivolo completo si ottengono te-
nendo conto, oltre che del contributo dellala isolata, sia i contributi di tutti
gli altri componenti sia le azioni dovute alla mutua interferenza tra i com-
ponenti stessi (si ricorda che il coeciente di forza di un sistema non `e sem-
plicemente la somma dei coecienti dei singoli elementi che costituiscono
il sistema; le azioni di interferenza sono tuttaltro che trascurabili, special-
mente alle alte velocit` a). In questa trattazione si introducono dei cenni sui
contributi di fusoliera e coda, rimandando il lettore a testi specici, [?].
Generalmente le fusoliere danno un contributo alla portanza trascurabile.
Questo, in termini di resistenza, si traduce in un contributo nullo alla resi-
stenza indotta, mentre aumenta la resistenza parassita a causa della maggio-
re supercie esposta al usso. Il risultato `e che la curva polare risulta essere
traslata verso destra a causa dellaumento di C
D
0
.
3.4. LEFFICIENZA AERODINAMICA 25
Anche le superci di coda verticale, e in generale tutti gli impennaggi che
non generano forze portanti, non danno contributi alla resistenza indotta
e quindi il loro contributo alla polare del velivolo `e rappresentato da una
traslazione verso destra della curva. Per le superci di coda orizzontali la
componente normale alla velocit` a, che pu` o essere portante o deportante,
pu` o assumere valori rilevanti e quindi lipotesi di trascurare leetto della
resistenza indotta `e valida solo nelle condizioni caratterizzate da bassa inci-
denza (crociera ad alta velocit` a), mentre in tutti gli altri casi `e opportuno
correggere la forma della polare. Dato il carattere prettamente didattico del-
la presente trattazione lipotesi di polare del tipo espresso dalla (??) viene
mantenuta, trascurando gli eetti di resistenza indotta legati alle superci
di coda orizzontali.
La gura ?? riporta le variazioni alla curva polare introdotte dai contributi
di fusoliera e superci di coda.
3.4 LEcienza Aerodinamica
Si denisce ecienza aerodinamica il rapporto tra la portanza e la resistenza:
E =
L
D
=
1/2SV
2
C
L
1/2SV
2
C
D
(3.26)
Riscrivendo la precedente in termini di coecienti aerodinamici ed introdu-
cendo lespressione della polare data dalla (??) si ottiene:
E =
C
L
C
D
=
C
L
C
D
0
+K C
L
2
(3.27)
Per condizioni di volo lontane dalla soglia transonica, il coeciente di resi-
stenza parassita, C
D
0
, pu` o essere considerato costante: lecienza aerodina-
mica `e dunque funzione solo del coeciente di portanza.
Sotto questa ipotesi risulta agevole calcolare il valore di C
L
per cui si ottie-
ne la massima ecienza aerodinamica: derivando rispetto al coeciente di
portanza lequazione (??) si ha:
dE
dC
L
=
C
D
0
+k C
L
2
C
L
2KC
L
_
C
D
0
+K C
L
2
2
=
C
D
0
K C
L
2
_
C
D
0
+K C
L
2
2
(3.28)
Essendo il denominatore sempre positivo, la derivata prima si annulla quan-
do C
D
0
= k C
L
2
; quando cio`e il termine di resistenza parassita eguaglia il
26 CAPITOLO 3. LA POLARE DEL VELIVOLO
termine di resistenza indotta:
C
L
|
E
M
=
_
C
D
0
K
(3.29)
a cui corrisponde il massimo valore dellecienza aerodinamica:
E
M
=
1
4 C
D
0
K
(3.30)
Il valore dellecienza aerodinamica pu` o essere ricavato, senza ricorrere a
strumenti analitici, direttamente dal graco della polare, come mostrato
in gura ??: data una coppia di coecienti (C
L
, C
D
), corrispondente ad
una assegnata condizione di volo, si individua nel diagramma della polare il
punto A relativo alla suddetta condizione. Lecienza aerodinamica `e data
dalla tangente dellangolo compreso tra lasse delle ascisse ed il segmento che
unisce lorigine col punto A.
Considerando il triangolo AOH si ha infatti:
E =
C
L
C
D
=
AH
OH
(3.31)
e per la nota relazione sui triangoli rettangoli:
E =
AH
OH
= tan A
OH (3.32)
Dalla gura `e possibile trarre le seguenti considerazioni:
1. Lecienza aerodinamica assume il valore nullo in condizioni di por-
tanza nulla. In condizioni di bassa incidenza aumenta insieme a C
L
per poi diminuire mano a mano che ci si avvicina allo stallo.
2. Il valore massimo dellecienza aerodinamica si ha per quel valore di
C
L
per cui la retta uscente dallorigine degli assi risulta essere tangente
alla polare (punto C).
3.4.1 Variazione dellecienza aerodinamica con lallunga-
mento alare
Il legame tra ecienza aerodinamica ed allungamento alare `e espresso dal-
la (??) attraverso il parametro K denito dalla (??). La gura ?? mostra
3.4. LEFFICIENZA AERODINAMICA 27
Coefficiente di resistenza, C
D
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
C
A
H
O
Figura 3.5: Metodo graco per la determinazione dellecienza
aerodinamica
landamento della polare al variare del valore di AR. Aumentando lallun-
gamento, a parit` a di C
L
, lecienza cresce; nel caso limite AR = , la
curva polare collassa in una retta parallela allasse delle ordinate. Nelle ali
ad elevato allungamento il contributo della resistenza indotta diminuisce a
causa della ridotta intensit` a dei vortici di estremit` a e quindi la resistenza
aerodinamica tende ad identicarsi con il solo contributo di resistenza pa-
rassita C
D
0
. In altre parole, estremizzando lallungamento, unala nita si
comporta come un prolo bidimensionale.
Viceversa, mano a mano che lallungamento diminuisce, per un dato C
L
, il
valore dellecienza diminuisce; i vortici di estremit` a infatti aumentano di
intensit` a e di conseguenza anche la resistenza indotta assume valori via via
sempre pi` u elevati.
28 CAPITOLO 3. LA POLARE DEL VELIVOLO
Coefficiente di resistenza, C
D
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
AR =
Figura 3.6: Ecienza aerodinamica in funzione dellallungamento alare
Capitolo 4
Il volo librato
In questo capitolo vengono analizzate le caratteristiche del volo librato, cio`e
quella particolare condizione in cui la spinta dei motori `e nulla. Sebbene il
volo senza propulsione sia la caratteristica peculiare degli alianti, la presente
trattazione `e valida in generale per tutte le condizioni in cui la forza propul-
siva risulta trascurabile rispetto alle altre forze in gioco (volo con motore al
minimo o in avaria).
Nelle suddette condizioni il velivolo deve comunque sostenere il proprio peso:
mantenendo un opportuno valore di velocit` a si genera la portanza necessaria
ma, in assenza di contributi propulsivi, lunico modo per vincere la resisten-
za `e quello di ruotare il vettore della forza peso in modo tale da generare
una componente nella direzione del moto e concorde con la velocit` a. Da ci` o
segue che le traiettorie percorribili durante un volo librato possono essere
esclusivamente traiettorie di discesa, < 0.
Con riferimento alla gura ??, scrivendo lequazione delle forze lungo la dire-
zione del moto sotto lipotesi di volo in aria calma a velocit` a costante (valida
per piccole variazioni della quota) si ottiene:
D +mg sin() = D mg sin = 0 (4.1)
da cui:
sin =
D
mg
(4.2)
Il secondo membro della precedente equazione `e sempre negativo e dunque
la traiettoria che il velivolo sviluppa `e sempre discendente, < 0. Questo
risultato, che rappresenta il risultato principale del volo librato, non deve
29
30 CAPITOLO 4. IL VOLO LIBRATO
V
L
D
mg
g
Figura 4.1: Forze agenti sul velivolo in volo librato
tuttavia trarre in inganno e far pensare allimpossibilit` a, per un velivolo pri-
vo di propulsione, di eettuare una salita. E noto infatti che tutti gli alianti
possono salire rispetto al terreno: essi infatti guadagnano quota volando
secondo traiettorie di discesa allinterno di una massa daria che sale in mi-
sura maggiore per motivi legati al riscaldamento del suolo terrestre (correnti
termiche).
4.1 Equazioni Caratteristiche
Si consideri un velivolo in volo librato rettilineo uniforme lungo una traietto-
ria con pendenza . Lipotesi di moto rettilineo comporta lassenza di forze
laterali ( = 0) e quindi il modello matematico espresso dalle (??) si riduce
a:
D +mg sin = 0
L mg cos = 0
(4.3)
Sostituendo alle forze di portanza e resistenza le loro rispettive espressioni
si ottengono le equazioni di equilibrio del volo librato:
1/2SV
2
C
D
= mg sin
1/2SV
2
C
L
= mg cos
(4.4)
Dividendo membro a membro le precedenti espressioni si ricava:
C
D
C
L
= tan (4.5)
4.1. EQUAZIONI CARATTERISTICHE 31
e ricordando la denizione di E si arriva ad unimportante relazione tra
pendenza della traiettoria ed ecienza aerodinamica:
tan =
1
E
(4.6)
In un volo librato la tangente dellangolo di pendenza della traiettoria `e
inversamente proporzionale al valore dellecienza aerodinamica (e quindi
al valore di C
L
) mantenuto durante la planata.
Ricavando C
D
dalla (??) ed imponendolo nellequazione della polare si ha:
K C
2
L
+ tan C
L
+C
D
0
= 0 (4.7)
e risolvendo rispetto a C
L
si ottiene:
C
L
=
tan
_
tan
2
4 K C
D
0
2 K
(4.8)
Questultima espressione dimostra che esistono due valori dellassetto che
permettono di planare con unassegnata pendenza della traiettoria. Nel caso
particolare in cui si hanno due soluzioni coincidenti (discriminante nullo):
= tan
2
4 K C
D
0
= 0 (4.9)
si ritrova il risultato espresso dalla (??): il valore dellassetto che permette
la planata con la minima pendenza della traiettoria `e lo stesso che garantisce
la massima ecienza aerodinamica.
Con riferimento alla gura ??, `e utile riassumere quanto detto no ad ora
attraverso le seguenti considerazioni:
1. La traiettoria di minima pendenza si ottiene volando con il coeciente
di portanza di massima ecienza aerodinamica (punto E).
2. Per un assegnato valore di , esistono due intersezioni tra la semiretta
condotta dallorigine e la curva polare (punti A e B). Ci` o signica che
lo stesso angolo di planata pu` o essere realizzato con due diversi valori
del coeciente di portanza, ovvero con due diversi valori di velocit` a.
Se uno dei suddetti punti di intersezione coincide con lestremo della
polare si ha la condizione di planata percorsa alla velocit` a di stallo del
velivolo e quindi non realizzabile praticamente (punto S).
3. La pendenza della traiettoria `e indipendente dal peso.
32 CAPITOLO 4. IL VOLO LIBRATO
Coefficiente di resistenza, C
D
C
o
e
f
f
i
c
i
e
n
t
e
d
i
p
o
r
t
a
n
z
a
,
C
L
E
D
C
B
A
S
Figura 4.2: Importanti condizioni di volo evidenziate sulla polare del velivolo
4.2 Le prestazioni in planata
La possibilit` a di realizzare planate ad elevati valori di ecienza aerodina-
mica `e di notevole importanza per gli alianti. Per questo tipo di velivolo
uno dei due importanti indici di prestazione `e rappresentato dalla massima
distanza percorribile rispetto al suolo, d
g
. Tale parametro, pi` u propriamente
noto come autonomia chilometrica, `e strettamente legato alla pendenza della
traiettoria; dalla gura ??, indicando con h
i
la quota del velivolo allinizio
della planata e con d
a
la distanza percorsa rispetto allaria, si ha:
1
tan
= E =
d
a
h
i
(4.10)
dai cui, per planate in assenza di componenti di vento orizzontale:
d
a
= d
g
= E h
i
(4.11)
4.2. LE PRESTAZIONI IN PLANATA 33
h
d
g
i
a
Figura 4.3: Geometria del volo planato
In presenza di vento invece la distanza percorsa rispetto allaria rimane inva-
riata, mentre quella rispetto al suolo aumenta (vento a favore) o diminuisce
(vento contrario) di una quantit` a proporzionale alla velocit` a del vento stes-
so. Indicando con t
w
lintervallo di tempo durante il quale il velivolo subisce
lazione di un vento a velocit` a V
w
, la distanza percorribile rispetto al suolo
diviene:
d
g
= d
a
+V
w
t
w
= E h
i
+V
w
t
w
(4.12)
Appare chiaro che, a parit` a di quota iniziale h
i
, per qualsiasi condizione di
vento, la distanza percorsa rispetto al suolo, d
g
, `e massima quando la pla-
nata viene eettuata in condizioni di massima ecienza aerodinamica, E
M
.
Valori pi` u elevati dellecienza aerodinamica sono generalmente ottenibi-
li diminuendo il coeciente di resistenza indotta, attraverso un incremen-
to dellallungamento alare. Superci alari ad elevato allungamento infatti
presentano dei sistemi vorticosi in estremit` a ridotti rispetto ad ali meno al-
lungate: il fenomeno di riduzione locale dellincidenza risulta attenuato con
conseguente aumento dellecienza. Un incremento indiscriminato dellal-
lungamento alare `e tuttavia sconsigliato; ali con forte allungamento presen-
tano infatti notevoli problemi sia tecnologici sia strutturali e inoltre, a causa
dellaumento della pendenza della curva di portanza risultano pi` u sensibili
34 CAPITOLO 4. IL VOLO LIBRATO
alla turbolenza atmosferica.
Valori tipici dellecienza aerodinamica per gli alianti variano tra 25 e 30.
Per velivoli commerciali invece i valori di riferimento sono compresi tra 10 e
15, mentre per i velivoli militari raramente si arriva a 10.
4.2.1 Velocit`a sulla traiettoria e velocit`a verticale
Risolvendo la seconda delle (??) rispetto a V si ricava lespressione della
velocit` a lungo la traiettoria:
V =
_
2 mg cos
C
L
S
(4.13)
La dipendenza diretta dallangolo di pendenza della traiettoria pu` o esse-
re eliminata utilizzando la prima delle (??). Attraverso semplici passaggi,
lasciati al lettore come esercizio, si ha:
V =
2 mg
S
_
C
L
2
+C
D
2
(4.14)
La velocit` a lungo la traiettoria dipende dallinverso della somma dei quadrati
dei coecienti aerodinamici. Tale termine, come si pu` o facilmente vericare
nella gura ??, `e dato dalla lunghezza del segmento che unisce lorigine con
il punto sulla polare. Alcune osservazioni:
1. Date due condizioni caratterizzate dalla stessa pendenza della traiet-
toria (punti A e B), la velocit` a V
A
`e maggiore della velocit` a V
B
.
2. La velocit` a massima sulla traiettoria corrisponde alla condizione per
cui si ha il minimo valore del segmento che unisce lorigine con un
punto sulla polare (punto C). Si vede chiaramente dalla gura come la
pendenza della traiettoria di massima velocit` a `e prossima a -90
.
3. In condizioni di portanza nulla, il velivolo scende lungo la cosiddetta
traiettoria a candela; il velivolo perde quota senza spostamenti lungo
lorizzontale (punto D).
La velocit` a verticale, V
z
, si ricava imponendo la (??) nella terza delle (??).
Ipotizzando piccoli angoli per la pendenza della traiettoria si ha infatti:
V
z
= V sin V tan =
V
E
(4.15)
4.2. LE PRESTAZIONI IN PLANATA 35
utilizzando inoltre la seconda delle (??) si arriva a:
V
z
=
_
2 mg
S
1
E
C
L
(4.16)
La velocit` a verticale V
z
assume il suo minimo valore quando il prodotto
E
C
L
`e massimo; in questa condizione il velivolo perde la minor quantit` a
di quota a parit` a di tempo di volo e la corrispondente velocit` a lungo la tra-
iettoria denisce la seconda importante prestazione per laliante: la velocit` a
di massima autonomia oraria.
E importante sottolineare come la velocit` a verticale sia legata al termine
E
C
L
, a dierenza della pendenza della traiettoria inuenzata solo da E.
4.2.2 Lodografa del moto
Per la valutazione delle prestazioni del velivolo, il pilota daliante dispone di
un importante strumento graco: la curva odografa del moto, detta anche
polare della velocit` a, [?]. Tale curva, che permette di comprendere a fondo il
legame tra le prestazioni del velivolo ed i termini E e E
C
L
, viene ricavata
come segue:
1. Data una coppia (C
L
, C
D
) si calcola il valore dellecienza e del ter-
mine
_
C
L
2
+C
D
2
.
2. Attraverso la (??) si ricava il modulo della velocit` a sulla traiettoria,
mentre attraverso la (??) si ricava la pendenza della traiettoria, .
3. Il vettore cos` ottenuto viene riportato in un diagramma cartesiano in
cui in ascissa si ha la velocit` a verticale V
z
, e in ordinata la velocit` a
orizzontale V
o
.
4. Ripetendo loperazione per ogni coppia di valori (C
L
, C
D
), lodografa
`e la curva che unisce tutti i punti di estremit` a dei vettori costruiti.
Utilizzando inne la stessa scala delle velocit` a, si riporta sul diagramma la
curva polare in modo tale che lasse delle velocit` a orizzontali rappresenti i
valori di C
L
, mentre quello delle velocit` a verticali i valori di C
D
.
Con riferimento alla gura ??, si consideri un punto A sulla polare, cor-
rispondente ad un generico valore dellecienza. Prolungando il segmento
che unisce lorigine col punto A si intercetta la curva odografa nel punto
36 CAPITOLO 4. IL VOLO LIBRATO
B: questo permette di ricavare direttamente dal graco la pendenza della
traiettoria, la velocit` a verticale e la velocit` a orizzontale (in condizioni di aria
calma coincide con la velocit` a rispetto al suolo).
Il punto E sulla curva polare rappresenta la condizione di massima ecienza
al quale corrisponde la minima pendenza della traiettoria; `e ottenibile per
un solo valore di velocit` a, individuato dal segmento che unisce lorigine con
il punto F sullodografa. Inne, il minimo valore di velocit` a verticale V
z
`e individuabile tracciando la retta parallela allasse V
o
e tangente alla cur-
va odografa; lassetto corrispondente `e quello per cui il prodotto (E
C
L
)
assume il valore massimo.
C Vo
C Vz
E
F
g
min
A
B
g
D
L
V
Z
min
Figura 4.4: Lodografa del moto
4.3. INFLUENZA DEL VENTO 37
4.3 Inuenza del vento
Tutta la precedente trattazione del volo librato, relativamente allaliante o al
velivolo con motori in avaria o al minimo, `e basata sullipotesi di aria calma,
e i principali risultati sono qui riassunti per comodit` a:
1. Le traiettorie sono sempre caratterizzate da pendenze negative e le
prestazioni in planata possono essere ricavate dalla curva odografa.
2. La pendenza della traiettoria `e sempre indipendente dal peso; la di-
stanza percorribile (autonomia chilometrica) `e quindi solo funzione
dellecienza aerodinamica.
3. Il tempo di volo (autonomia oraria) `e invece legato al peso del velivolo;
assume il valore massimo per (E
C
L
)
M
.
Lipotesi di aria calma non `e tuttavia rappresentativa delle reali condizio-
ni in cui si trova ad operare un velivolo durante una planata. Latmosfera
infatti `e sempre attraversata da correnti caratterizzate da svariate velocit` a
e direzioni, ed `e proprio grazie queste correnti che laliante pu` o guadagnare
quota rispetto al suolo.
Le precedenti considerazioni dovranno quindi essere rivisitate nel momento
in cui si rimuove lipotesi di aria calma.
Si considerano tre dierenti aspetti: 1) Correnti verticali: in condizioni di
vento di intensit` a V
w
, la polare delle velocit` a viene modicata attraverso una
traslazione della curva stessa pari al modulo della velocit` a della corrente. Nel
caso di correnti ascensionali lodografa trasla avvicinandosi allorigine degli
assi, viceversa nel caso di correnti discendenti. La gura ?? riporta lodogra-
fa in aria calma e la corrispondente in presenza di una corrente ascensionale.
E evidente come la pendenza della traiettoria risulta essere ridotta cos` co-
me il valore della velocit` a verticale. Inoltre esistono dei valori di incidenza
tali per cui `e possibile la salita: nel punto C langolo di pendenza della tra-
iettoria (in questo caso rispetto al suolo) risulta essere positivo, e quindi il
velivolo sale di quota.
2) Correnti orizzontali: dati due velivoli con le stesse caratteristiche aerodi-
namiche ma di peso diverso. In assenza di vento, volendo allo stesso valore
di ecienza aerodinamica essi percorrono la stessa distanza; il pi` u pesan-
te, caratterizzato da una maggiore velocit` a lungo la traiettoria, raggiunger` a
terra per primo. Le cose cambiano in presenza di una corrente parallela alla
38 CAPITOLO 4. IL VOLO LIBRATO
direzione orizzontale, e i due velivoli nelle stesse condizioni si comportano
diversamente; in particolare il velivolo pi` u pesante (e quindi pi` u veloce) sar` a
favorito in caso di vento contrario, ma penalizzato in caso di vento a favore.
Attraverso la composizione dei vettori velocit` a, la gura ?? `e utile a chiarire
questo concetto, [?]. 3) Tempo di volo: sia in aria calma che in presenza di
correnti, il tempo di volo, a parit` a di ecienza, diminuisce con il peso del
velivolo. Ci` o `e dovuto al fatto che la velocit` a verticale `e strettamente legata,
dalla (??), alla velocit` a lungo la traiettoria, la quale cresce con il peso del
velivolo.
V
O
V
Z
C
g
V
W
Figura 4.5: Lodografa del moto in presenza di vento
4.3. INFLUENZA DEL VENTO 39
Percorso aereo leggero con vento
Percorso aereo pesante con vento
Percorso comune senza vento
Aereo leggero
Aereo pesante
Vento
contrario
g
Vento
Vento
Percorso aereo leggero con vento
Percorso aereo pesante con vento
Percorso comune senza vento
Aereo leggero
Aereo pesante
Vento
in coda
g
Vento
Vento
(a)
(b)
Figura 4.6: Importanza del peso del velivolo in presenza di vento
Capitolo 5
Il volo livellato
In questo capitolo vengono arontate, con riferimento a velivoli propulsi ad
elica e a getto, le problematiche relative al volo livellato, che `e la condizio-
ne pi` u utilizzata allinterno delle missioni per la maggior parte dei velivoli
commerciali e militari. Per volo livellato si intende la condizione in cui il
velivolo si muove di moto rettilineo orizzontale uniforme. La gura ?? mo-
stra le forze agenti sul velivolo in condizioni di volo livellato: la portanza, L,
che sostiene il peso del velivolo, mg, e la spinta erogata dai propulsori, T,
necessaria a vincere la resistenza aerodinamica, D.
V
L
D
mg
T
Figura 5.1: Forze agenti sul velivolo in volo livellato
41
42 CAPITOLO 5. IL VOLO LIVELLATO
5.1 Equazioni Caratteristiche
Le equazioni del moto del volo livellato possono essere ricavate imponendo
nel modello (??) le condizioni
V = = = 0, e V = cost, introdotte dalla
denizione stessa di volo livellato. Si ottiene:
1/2SV
2
C
L
= mg
1/2SV
2
C
D
= T
(5.1)
Queste ci permettono immediatamente di ricavare due importanti parametri
che caratterizzano il volo livellato; dividendo la seconda delle (??) per la
prima si ottiene una relazione che lega il rapporto spinta/peso con lecienza
aerodinamica della condizione di volo:
T
mg
=
C
D
C
L
=
1
E
(5.2)
mentre dalla prima equazione, assegnato un valore del coeciente di por-
tanza, la velocit` a (rispetto allaria) necessaria a sostenere il peso `e data
da:
V =
_
2 mg
SC
L
(5.3)
la quale aumenta allaumentare del pese e della quota. Per un volo livellato
a livello del mare si ha facilmente:
V
SL
=
_
2 mg
0
SC
L
(5.4)
e dividendo la (??) per la (??), si ottiene:
V = V
SL
_
(5.5)
Questa ultima relazione consente di calcolare il valore della velocit` a rispetto
allaria necessario a mantenere il volo livellato ad una quota generica, una
volta noto il corrispondente valore al livello del mare, V
SL
. Tale valore che
rappresenta la velocit` a di taratura dellanemometro, `e chiamato velocit` a in-
dicata, V
IAS
.
E importante sottolineare che, ssato il peso e lincidenza di volo, per cia-
scun valore di quota la velocit` a indicata (e quindi lentit` a della portanza
5.1. EQUAZIONI CARATTERISTICHE 43
generata) non varia: la diminuzione di densit` a dovuta allaumento di quota
viene infatti compensata dalla variazione di velocit` a vera. Questo `e facil-
mente intuibile ricordando che per qualsiasi valore della quota il peso da
sostenere non varia, e quindi la forza necessaria a sostenerlo in volo non pu` o
variare.
Imponendo nella (??) il valore massimo del coeciente di portanza si ottiene
la velocit` a di stallo:
V
st
=
2 mg
SC
L
M
(5.6)
Essa `e denita come il valore minimo della velocit` a alla quale `e possibile
sostenere il velivolo in volo livellato e dipende dalla quota e dal peso. Espri-
mendo la velocit` a di stallo in termini di velocit` a indicata, per la (??) si
ha:
V
st
(IAS) =
2 mg
0
SC
L
M
(5.7)
che `e la velocit` a riportata nellanemometro al di sotto della quale il pilota
non deve mai scendere, indipendentemente dalla quota.
Il modello matematico del volo livellato costituito dalle (??), insieme alla
polare del velivolo, rappresenta un primo utile strumento per ottenere i valori
di incidenza e spinta necessari per mantenere una condizione di volo livellato,
caratterizzata da valori noti di velocit` a e quota; dato il peso del velivolo,
attraverso la prima equazione del moto si ricava il valore del coeciente di
portanza:
C
L
=
2 mg
SV
2
(5.8)
Successivamente, attraverso la curva della portanza si ricava il valore di
e dalla polare del velivolo si ottiene il coeciente di resistenza, C
D
. Inne
attraverso la seconda equazione si calcola la spinta necessaria, T
n
, che deve
essere erogata dallapparato propulsore.
Un secondo modo di vedere lequilibrio tra lenergia meccanica del propul-
sore e lazione della forza di resistenza aerodinamica `e quello in termini di
potenza. Si denisce infatti potenza necessaria al volo, P
n
il prodotto la la
resistenza aerodinamica generata e la velocit` a di volo:
P
n
= DV (5.9)
La convenienza nellesprimere le richieste propulsive in termini di spinta o di
potenza necessaria, dipende esclusivamente dal tipo di propulsore installato
44 CAPITOLO 5. IL VOLO LIVELLATO
nel velivolo. Generalmente, nel caso di un motore propulso con motore ad
elica, la richiesta per vincere la resistenza aerodinamica si esprime in termini
di potenza necessaria, P
n
= DV . Infatti lelica fornisce una forza propulsiva
(trazione) che varia con la velocit` a, e quindi un eventuale diagramma in
cui si riporta la trazione dellelica non costituirebbe uno strumento utile ai
ni della valutazione delle prestazioni. Viceversa, per un velivolo propulso a
getto, la spinta erogata dal motore pu` o ritenersi, con buona approssimazione,
indipendente dalla velocit` a; la richiesta propulsiva per vincere la resistenza
pu` o esprimersi dunque in termini di spinta necessaria, T
n
= D.
5.2 La curva della resistenza
Prima di studiare le relazioni che legano potenza e spinta necessarie al volo
con la velocit` a, `e utile introdurre la relazione tra resistenza e velocit` a relati-
vamente alla condizione di volo livellato. Tale relazione `e infatti di notevole
importanza sia per lo studio delle prestazioni che per la comprensione di
certi fenomeni legati ai diversi contributi della resistenza. Si consideri la
denizione di resistenza aerodinamica; introducendo la polare del velivolo si
ha:
D =
1
2
SV
2
C
D
=
1
2
SV
2
(C
D
0
+K C
L
2
) (5.10)
introducendo la (??):
D =
1
2
SV
2
_
C
D
0
+K
_
2 mg
SV
2
_
2
_
(5.11)
da cui:
D =
1
2
SC
D
0
V
2
+ 2K
(mg)
2
S
1
V
2
= AV
2
+B
1
V
2
(5.12)
I coecienti A, e B, che possono ritenersi costanti per condizioni lontane
dalla soglia transonica, descrivono la dipendenza dalla velocit` a dei principali
contributi della resistenza aerodinamica. Il termine AV
2
, che rappresenta
il contributo della resistenza parassita, `e una parabola centrata nellorigine,
mentre il termine BV
2
, che descrive una generica curva del secondo ordi-
ne, rappresenta il contributo della resistenza indotta. La gura ?? riporta,
per un assegnato valore della quota e del peso, la curva della resistenza in
funzione della velocit` a ottenuta come somma dei due singoli contributi sopra
descritti.
5.2. LA CURVA DELLA RESISTENZA 45
V min V Emax V max
D min
Velocit, V
R
e
s
i
s
t
e
n
z
a
,
D
resistenza parassita
resistenza indotta
resistenza totale
Figura 5.2: La curva della resistenza aerodinamica in funzione della velocit` a
dD
dV
= 2 AV 2 BV
3
= 0 (5.13)
Ci` o accade se AV
2
= BV
2
, ovvero quando il termine di resistenza pa-
rassita `e uguale al termine di resistenza indotta, che per quanto osservato
in precedenza, si presenta ogni qual volta il velivolo operi in condizioni di
massima ecienza aerodinamica.
A questo risultato si arriva anche in modo intuitivo dalle equazioni del moto
del volo livellato:
L
D
m
=
mg
D
m
= E
M
(5.14)
Il valore della velocit` a per cui il velivolo percorre traiettorie di volo livellato
in condizioni di E
M
si ottiene introducendo la (??) nella (??):
V
E
M
=
2 mg
S
_
C
D
0
/K
=
4
_
B
A
(5.15)
46 CAPITOLO 5. IL VOLO LIVELLATO
Tale velocit` a, nota come velocit` a di ecienza massima, oltre a rappresentare
un parametro di riferimento per le condizioni operative del velivolo, intro-
duce un ulteriore importante vincolo sullallungamento alare. In precedenza
era stato evidenziato come lintervento sullallungamento alare rappresenti il
metodo pi` u immediato per ridurre la resistenza indotta e quindi incrementa-
re lecienza. Tuttavia elevati valori di AR portano a velivoli caratterizzati
da valori bassi della velocit` a di massima ecienza; di conseguenza, al ne
di avere una V
E
M
sucientemente elevata sono necessari maggiori valori del
carico alare, mg/S, con ovvi svantaggi relativamente ad altre prestazioni
quali la velocit` a di stallo e la lunghezza di decollo.
A completamento del paragrafo si introduce inne un utile parametro per il
successivo studio delle prestazioni, [?]: dato un generico assetto di volo, la
velocit` a associata a questo assetto pu` o essere espressa come porzione della
velocit` a di ecienza massima data dalla (??):
V = b V
E
M
= b
2 W
S
_
C
D
0
/K
(5.16)
dove b `e una costante indipendente dal peso. Dalla precedente equazione di
ricava:
b =
V
V
E
M
=
4
C
D
0
K C
2
L
(5.17)
Poiche i coecienti C
D
0
e K sono indipendenti dalla velocit` a, il parametro
b `e funzione solo dellassetto di volo prescelto. A questo punto `e possibile
esprimere i coecienti aerodinamici C
L
e C
D
come funzioni dei parametri
C
D
0
, K e b. Dalla prima relazione del volo livellato si ha:
mg =
1
2
SC
L
(b V
E
M
)
2
(5.18)
ma anche
mg =
1
2
S C
L
|
E
M
V
2
E
M
(5.19)
dividendo la prima per la seconda ed esplicitando C
L
si ottiene:
C
L
=
C
L
|
E
M
b
2
=
1
b
2
_
C
D
0
K
(5.20)
5.3. POTENZA NECESSARIA E POTENZA DISPONIBILE 47
Sostituendo questultima espressione nellequazione della polare si arriva alla
seguente forma per il coeciente di resistenza:
C
D
= C
D
0
+KC
2
L
=
1 +b
4
b
4
C
D
0
(5.21)
Inne, il corrispondente valore dellecienza aerodinamica risulta essere:
E =
C
L
(C
D
0
, K, b)
C
D
(C
D
0
, K, b)
=
b
2
1 +b
4
1
_
C
D
0
K
(5.22)
5.3 Potenza necessaria e potenza disponibile
Ricordando la denizione di potenza necessaria ed utilizzando la (??) si ha:
P
n
= DV =
1
2
SV
2
_
C
D
0
+K
_
2 mg
SV
2
_
2
_
V (5.23)
oppure in forma pi` u compatta:
P
n
= AV
3
+BV
1
(5.24)
La gura ?? mostra landamento della potenza necessaria in funzione della
velocit` a costruita come somma dei due singoli contributi. La curva presenta
un minimo quando si annulla la derivata prima rispetto alla velocit` a:
dP
n
dV
= 3 AV
2
BV
2
= 0 (5.25)
ossia per:
3 AV
4
= B (5.26)
Il valore della velocit` a corrispondente a questa condizione `e detta velocit` a di
minima potenza necessaria:
V
P
m
=
1
4
3
4
_
B
A
(5.27)
Introducendo la denizione di velocit` a di ecienza massima data dalla (??):
V
P
m
=
1
4
3
V
E
M
=
1
4
2 mg
S
_
C
D
0
/K
(5.28)
48 CAPITOLO 5. IL VOLO LIVELLATO
V min V Pmin V Emax V max
P min
Velocit, V
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
,
P
n
Figura 5.3: La curva della potenza necessaria in funzione della velocit` a
e quindi per un velivolo propulso ad elica in condizioni di volo livellato si
ha che V
P
m
< V
E
M
. Questo pu` o essere visto anche gracamente: poiche
la velocit` a di ecienza massima si trova nel punto di minimo della curva
D = f(V ), nel diagramma P
n
= f(V ) essa si colloca nel punto in cui il
rapporto P
n
/V assume il valore minimo, cio`e nel punto di tangenza tra
la retta uscente dellorigine e la curva della potenza necessaria. Il valore
del coeciente di portanza per cui si ha la condizione di minima potenza
necessaria si ottiene imponendo b = 1/
4
3 nella (??):
C
L
|
P
m
=
3 C
L
|
E
M
=
3
_
C
D
0
/K (5.29)
La valutazione della sola potenza necessaria, P
n
, non `e tuttavia suciente
alla risoluzione del problema del volo livellato. Al ne di stabilire se, per un
assegnato valore di velocit` a ed assetto, il velivolo risulta equilibrato e quindi
in grado di mantenersi in volo livellato, `e necessario conoscere la potenza
5.3. POTENZA NECESSARIA E POTENZA DISPONIBILE 49
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
e
d
i
s
p
o
n
i
b
i
l
e
,
P
n
,
P
d
P
n
P
d
P
d
< P
d
V
A
V
L
V
B
V
H
V
K
Velocit, V
Figura 5.4: La curva della potenza necessaria e disponibile
eettivamente erogata dal propulsore in quella determinata condizione. Tale
valore, noto come potenza disponibile, P
d
, `e dato dalla relazione:
P
d
=
p
P
e
(5.30)
dove con
p
si indica il rendimento dellelica, che per il resto della trattazione
sar` a considerato indipendente dalla velocit` a, e con P
e
la potenza erogata dal
motore alla quota considerata.
Anche si abbia volo livellato la potenza disponibile deve essere uguale alla
potenza necessaria, P
n
= P
d
. In caso contrario, leccesso (o il difetto) di
potenza, P = P
d
P
n
, viene utilizzato per incrementare (o diminuire)
lenergia totale del sistema, data dalla somma di energia cinetica e poten-
ziale. La gura ?? riporta sullo stesso graco le curve di potenza necessaria
e disponibile in funzione della velocit` a calcolate a livello del mare. In corri-
spondenza dei punti di intersezione tra le due curve si hanno due condizioni
di volo livellato: la prima caratterizzata da velocit` a inferiore rispetto alla
50 CAPITOLO 5. IL VOLO LIVELLATO
velocit` a di potenza minima, V
A
< V
P
m
, la seconda da una velocit` a maggiore,
V
B
> V
P
m
.
Si consideri un valore di velocit` a V
L
compreso tra V
A
e V
B
per il quale la po-
tenza disponibile `e superiore alla potenza necessaria, P
d
> P
n
. Il conseguente
eccesso di potenza pu` o essere gestito in diversi modi:
1. E utilizzato per incrementare solo lenergia potenziale: il velivolo sale
con velocit` a verticale proporzionale alleccesso di potenza
2. E utilizzato per incrementare solo lenergia cinetica: il velivolo ac-
celera no a raggiungere la velocit` a V
B
corrispondente alla seconda
intersezione tra le curve; punto in cui leccesso di potenza si annulla.
3. E utilizzato per generare una condizione di volo intermedia rispetto
a quelle descritte nei due punti precedenti. Il velivolo accelera no ad
valore della velocit` a V
K
< V
B
, in modo da non annullare completa-
mente leccesso di potenza. Leccesso residuo viene quindi utilizzato
per realizzare una velocit` a verticale.
4. E eliminato riducendo il regime del motore, P
d
< P
d
. La curva della
potenza disponibile viene traslata verso il basso in modo da creare una
nuova condizione di volo livellato caratterizzata dalla velocit` a V
H
< V
B
5.4 Inuenza della quota sulle curve di potenza
La curva della potenza necessaria in funzione della velocit` a `e valida per un
solo valore della quota ed in genere si fa riferimento alle condizioni al livello
del mare, =
0
.
Lo studio delle variazioni della curva P
n
= f(V ) con la quota viene arontato
come segue: indicando con q = 1/2 V
2
la pressione dinamica, la potenza
necessaria pu` o scriversi come:
P
n
=
_
qSC
D
0
+
K(mg)
2
qS
_
V (5.31)
e in assenza di fenomeni di comprimibilit` a, i termini C
D
0
, K e q possono
ritenersi indipendenti dalla quota. Di conseguenza la potenza necessaria
risulta essere una funzione lineare della velocit` a vera, la quale per volo ad
5.4. INFLUENZA DELLA QUOTA SULLE CURVE DI POTENZA 51
assetto costante varia con la quota secondo la relazione:
V = V
SL
_
(5.32)
Sostituendo questultima relazione nella (??) si ottiene:
P
n
= C
n
1
(5.33)
dove C
n
`e un termine costante. La potenza necessaria quindi cresce con la
quota secondo 1/
. La gura ?? mostra landamento della curva P
n
=
f(V ) per diversi valori della quota. Si vede come allaumentare della quota
le curve della potenza necessaria traslano verso destra e verso lalto, mante-
nendosi tuttavia tangenti alla medesima retta uscente dallorigine degli assi.
La ragione di questo comportamento risiede nel fatto che la pendenza della
retta uscente dallorigine e tangente alla curva P
n
= f(V ) `e proporzionale
allinverso del valore massimo della ecienza aerodinamica che velivolo, che
com`e noto non dipende dalla quota.
Analiticamente questo comportamento si pu` o dimostrare calcolando la pen-
denza della retta tangente alla curva dallorigine e mostrando lindipendenza
dalla quota. Dallintersezione della generica retta P = m
p
V con la curva
della potenza necessaria si ha:
AV
4
m
p
V
2
+B = 0 (5.34)
da cui:
V =
_
m
p
_
m
2
p
4 AB
2A
(5.35)
Imponendo la condizione di tangenza (due soluzioni reali e coincidenti), =
0, si ottiene:
m
p
=
4AB = 2 mg
_
C
D
0
K (5.36)
Il valore della velocit` a vera rispetto allaria per cui si ha il volo in condizione
di E
M
, cresce invece allaumentare della quota.
Relativamente alle curve della potenza disponibile esse traslano verso il basso
allaumentare della quota; a parit` a di velocit` a la potenza disponibile diminui-
sce con la quota e quindi esiste un valore di tale per cui le due intersezioni
52 CAPITOLO 5. IL VOLO LIVELLATO
Velocit, V
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
,
P
n
SL
h
1
h
2
> h
1
Figura 5.5: La curva della potenza necessaria al variare della quota
tra la curva P
n
e la curva P
d
divengono coincidenti e le curve risultano tan-
genti, come mostrato in gura ??. La condizione di tangenza avviene nel
punto di minima potenza necessaria e la quota alla quale si presenta il sud-
detto fenomeno `e chiamata quota di tangenza. Essa rappresenta il massimo
valore della quota alla quale `e possibile equilibrare il velivolo in una condi-
zione di volo livellato: per altitudini superiori non si hanno pi` u intersezioni
tra le due curve e di conseguenza risulta impossibile mantenere la condizione
di volo livellato.
Generalmente si fa riferimento a due quote di tangenza diverse:
1. Quota di tangenza pratica, o service ceiling, a cui corrisponde un
rateo massimo di salita di 100 piedi al minuto.
2. Quota di tangenza teorica, o absolute ceiling, a cui corrisponde un
eccesso di potenza nullo, e quindi non si ha la possibilit` a di volare con
ratei di salita positivi.
5.5. INFLUENZA DEL PESO SULLE CURVE DI POTENZA 53
Velocit, V
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
e
d
i
s
p
o
n
i
b
i
l
e
,
P
n
,
P
d
V
P min
Figura 5.6: La curve della potenza necessaria e disponibile alla quota di
tangenza
5.5 Inuenza del peso sulle curve di potenza
A parit` a di incidenza di volo e di quota, il peso del velivolo inuenza la
curva della potenza necessaria. In particolare, se il peso diminuisce a causa
del consumo di carburante o del rilascio di uomini o materiali, la potenza
necessaria diminuisce secondo la legge:
P
n
P
n
=
mg
1
mg
2
_
mg
1
mg
2
(5.37)
La gura ?? mostra la variazione della curva P
n
= f(V ) per tre diversi valori
del peso. La gura mostra chiaramente come la diminuzione di potenza
necessaria sia poco inuente per elevati valori della velocit` a, mentre assume
valori signicativi in corrispondenza delle basse velocit` a. Ci` o `e dovuto al
fatto che il il peso va ad inuenzare solo la resistenza indotta, il cui contributo
54 CAPITOLO 5. IL VOLO LIVELLATO
P
o
n
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
,
P
n mg
V
P min
Velocit, V
Figura 5.7: La curve della potenza necessaria al variare del peso
`e importante per le basse velocit` a. In particolare in corrispondenza della
velocit` a di minima potenza necessaria, il cui valore `e proporzionale alla radice
quadrata del peso, si avr` a una diminuzione sensibile della potenza necessaria
con un conseguente eccesso di potenza che consente, a parit` a di potenza
disponibile, un aumento della quota di tangenza.
5.6 La stabilit`a propulsiva del velivolo ad elica
Lintersezione tra le curve della potenza necessaria e disponibile mostra co-
me per un assegnato valore del peso e della quota esistono due punti in cui le
curve assumono lo stesso valore e quindi `e possibile, per le velocit` a corrispon-
denti ai suddetti punti di intersezione, equilibrare il velivolo in condizioni di
volo livellato. Con riferimento alla gura ??, il valore della velocit` a corri-
spondente alla prima intersezione `e chiamata velocit` a di primo regime, V
A
,
5.6. LA STABILIT
`
A PROPULSIVA DEL VELIVOLO AD ELICA 55
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
e
d
i
s
p
o
n
i
b
i
l
e
,
P
n
,
P
d
V
A
V
A
V
A
V
B
V
B
V
B
V
P min
Velocit, V
P
n
> P
d
P
n
< P
d
Figura 5.8: Instabilit` a propulsiva del velivolo ad elica
ed in questa condizione il velivolo `e caratterizzato dalla cosiddetta stabi-
lit` a propulsiva, [?]. Per comprendere a fondo questo fenomeno si supponga
ad esempio, che in corrispondenza di V
A
il velivolo subisca leetto di una
raca verticale, con una conseguente diminuzione dellincidenza aerodina-
mica. Il velivolo tende a picchiare incrementando la velocit` a no ad un
valore V
A
> V
A
, dove la corrispondente potenza necessaria, P
n
risulter` a es-
sere maggiore di quella disponibile impostata dal pilota, P
d
. Il difetto di
potenza cos` generato tende ad immettere il velivolo in una condizione di
discesa. Se il pilota a questo punto cerca di mantenere la quota attraver-
so una deessione dellequilibratore, richiamando il velivolo introdurr` a una
riduzione di velocit` a ripristinando cos` il valore iniziale V
A
. Viceversa, nel
caso di disturbo che tende a rallentare il velivolo portandolo ad una velocit` a
V
A
< V
A
, si genera un eccesso di potenza che genera una pendenza della
traiettoria a salire. Il pilota attraverso la barra dellequilibratore tende a
picchiare il velivolo accelerandolo e riportando cos` la velocit` a al valore di
56 CAPITOLO 5. IL VOLO LIVELLATO
riferimento V
A
.
Le cose cambiano completamente nel caso di velivolo stabilizzato per il volo
livellato alla velocit` a di secondo regime, V
B
. Si riscontra infatti che se la
velocit` a aumenta di una quantit` a V e raggiunge il valore V
B
> V
B
, la
potenza necessaria al volo orizzontale diminuisce e diventa inferiore a quel-
la disponibile e di conseguenza leccesso di potenza tende ad immettere il
velivolo in una traiettoria di salita. Se il pilota qui agisce istintivamente
per mantenere la quota (picchia il velivolo attraverso la deessione delle-
quilibratore), laereo accelera ulteriormente generando un maggiore eccesso
di spinta. Il fenomeno si arresta quando il velivolo giunge alla velocit` a di
potenza minima.
Allo stesso modo, se il velivolo rallenta portando la velocit` a al valore V
B
, si
genera un difetto di potenza che inserisce il velivolo in una traiettoria di di-
scesa; se il pilota cerca di mantenere la quota cabrando, provoca un ulteriore
rallentamento del velivolo e quindi un incremento del difetto di potenza. Il
processo porta allo stallo del velivolo.
Alla luce delle precedenti considerazioni `e possibile riassumere la dierenza
tra i due dierenti regimi:
1. Il volo nel regime stabile, V > V
P
m
, `e caratterizzato da unattitudi-
ne naturale dellaereo a mantenere la velocit` a di equilibrio per quella
determinata condizione di volo in modo completamente naturale.
2. Nel ramo instabile della curva, V < V
P
m
, la suddetta attitudine non
`e manifestata ed il velivolo tende ad allontanarsi dalla condizione di
equilibrio, una volta perturbato da essa.
Il volo nella regione stabile `e una condizione di lunga molto pi` u utilizzata
rispetto al volo nella regione instabile; la ragione va cercata nel fatto che, per
un assegnato valore della potenza disponibile, il volo nella regione stabile `e
caratterizzato da una velocit` a maggiore rispetto al volo nella parte instabile
con ovvi vantaggi dal punto di vista commerciale (a parit` a di potenza ero-
gata la stessa missione viene completata in minor tempo).
In questa regione tuttavia il comportamento del velivolo pu` o portare a con-
clusioni non sempre esatte circa la tecnica di pilotaggio da impiegare. Per
un velivolo in condizioni di volo livellato nella zona stabile, un aumento della
velocit` a senza la corrispondente variazione del regime motore, genera una di-
fetto di potenza che provoca la discesa dellaereo. mentre una riduzione della
velocit` a, senza variazione del regime motore, genera un eccesso di potenza
5.7. SPINTA NECESSARIA E SPINTA DISPONIBILE 57
per cui laereo sale; a queste variazioni di velocit` a corrispondono delle rapide
variazioni dellangolo dincidenza, e questo pu` o generare nel pilota limpres-
sione che sia possibile un eciente controllo della pendenza della traiettoria
attraverso la deessione dellangolo di equilibratore (si tenga presente che
la risposta del velivolo ad un comando di equilibratore `e molto pi` u rapida
della risposta ad un comando di spinta). Tale impressione corrisponde alla
verit` a nche le condizioni di volo sono caratterizzate da valori della velocit` a
appartenenti al regime stabile della curva; nel regime instabile il controllo
della pendenza della traiettoria deve essere eettuato accompagnando la de-
essione dellequilibratore con un opportuna azione sul regime del motore.
I moderni velivoli commerciali hanno dei sistemi di controllo (auto-throttle)
che variano automaticamente il regime del motore al ne di evitare fenomeni
di instabilit` a propulsiva durante il volo alle basse velocit` a.
E utile inne introdurre una ulteriore considerazione sul volo nella regione
instabile; un velivolo staticamente stabile se perturbato dalla sua condizione
di equilibrio, attraverso delle oscillazioni lungo la traiettoria caratterizzate
da determinati valori dello smorzamento, tende a mantenere sia il suo coef-
ciente di portanza, C
L
trim
, sia la relativa velocit` a. Tuttavia, le azioni che
nascono per ripristinare lequilibrio hanno una evoluzione talmente lenta da
dare al pilota limpressione che, contrariamente a quanto avviene alle ele-
vate velocit` a, la dierenza tra velocit` a attuale e velocit` a di equilibrio non
accenni a diminuire. Questa ed altre impressioni ricevute (e le relative abi-
tudini acquisite), possono condurre a situazioni pericolose durante le fasi pi` u
lente della missione (ad esempio latterraggio) appartenenti quasi sempre al
regime instabile.
5.7 Spinta necessaria e spinta disponibile
Una tra le caratteristiche principali di un motore a getto `e che, contraria-
mente a quanto accade nei motori ad elica, la spinta erogata da un motore
a getto pu` o essere considerata indipendente dalla velocit` a.
Il volo livellato per un velivolo propulso a getto `e possibile quando la spin-
ta disponibile, T
d
, eguaglia la resistenza aerodinamica, che rappresenta la
spinta necessaria T
n
.
T
d
= D (5.38)
58 CAPITOLO 5. IL VOLO LIVELLATO
Dalla relazione tra la resistenza aerodinamica e la velocit` a data dalla (??),
si ricava subito la trazione necessaria:
T
n
= AV
2
+B
1
V
2
(5.39)
Le considerazioni fatte per la curva della resistenza aerodinamica in funzione
della velocit` a posso essere trasferite alla spinta necessaria. Anche la curva
T
n
= f(V ) ammette un punto di minimo: il valore minimo della spinta
necessaria al volo livellato si ha in condizioni di minima resistenza, ovvero
in condizioni di massima ecienza aerodinamica.
V
T
m
= V
E
M
=
2mg
S
_
C
D
0
/K
=
4
_
B
A
(5.40)
5.8 Inuenza della quota e del peso
La resistenza aerodinamica, per un assegnato valore del peso e dellincidenza
non dipende dalla quota. Di conseguenza per modicare la curva della spinta
necessaria, T
n
= f(V ), al variare della quota trasla verso destra mantenen-
dosi tangente, in corrispondenza della velocit` a di minima spinta necessaria
(ovvero di massima ecienza aerodinamica per quella quota), alla stessa ret-
ta parallela allasse delle ascisse. La gura ?? mostra il suddetto andamento.
Questo comportamento pu` o essere inoltre dimostrato analiticamente facendo
vedere che il minimo della curva T
n
= f(V ) `e indipendente dalla quota:
T
n
m
= AV
2
E
M
+B
1
V
2
E
M
(5.41)
introducendo lespressione della velocit` a di ecienza massima data dalla (??)
si ottiene:
T
n
m
= A
_
B
A
+B
_
A
B
= 2
_
C
D
0
k (mg) (5.42)
che risulta quindi indipendente dalla quota.
Per quanto riguarda la curva della spinta disponibile, T
d
, allaumentare della
quota di abbassa in quanto il propulsore eroga sempre meno spinta. Il valo-
re della quota per cui la curva della spinta necessaria e la retta della spinta
disponibile sono tangenti nel punto di minima spinta necessaria `e chiama-
to quota di tangenza per il velivolo a getto. In questa situazione lunica
5.8. INFLUENZA DELLA QUOTA E DEL PESO 59
S
p
i
n
t
a
n
e
c
e
s
s
a
r
i
a
,
T
n
T
n min
V
E max
T
d max
, SL
T
d max
, h
T
d max
, tangenza
V
E max
, tangenza
Velocit, V
Figura 5.9: Curva della spinta necessaria al variare della quota
condizione di volo ammissibile `e un volo livellato alla velocit` a di massima
ecienza.
Aumentando ulteriormente il valore della quota non si hanno pi` u intersezioni
tra le due curve T
n
e T
d
: di conseguenza il volo livellato diviene impossibile.
Come nel caso di velivoli propulsi ad elica, anche per i velivoli propulsi a
getto si fa distinzione tra la quota di tangenza teorica e quella operativa,
condizione per cui il velivolo pu` o ancora disporre di un valore di eccesso di
spinta (stabilito dai regolamenti) per immettersi in traiettorie di salita.
Lultima considerazione riguarda il fatto che, a dierenza delle curve del-
la potenza, le curve della spinta necessaria traslano al variare della quota
mantenendosi costanti alla stessa retta; in un velivolo in grado di eroga-
re la stessa spinta disponibile non esisterebbe una quota di tangenza. E
importante tuttavia ricordare che tutto questo `e vero sotto lipotesi di volo
subsonico (e quindi C
D
0
costante); oltre una certa quota infatti il coeciente
di resistenza parassita aumenta e anche la curva T
n
= f(V ) inizia a traslare
60 CAPITOLO 5. IL VOLO LIVELLATO
in alto verso valori maggiori di spinta necessaria.
Analogamente alla potenza, anche la spinta necessaria al volo `e inuenzata
dal peso del velivolo. Infatti dallequazione di equilibrio del volo livellato:
T
n
= D =
mg
E
(5.43)
e quindi a parit` a di ecienza aerodinamica (cio`e di incidenza) la spinta ae-
rodinamica `e direttamente proporzionale al peso del velivolo. In particolare
quando il peso del velivolo si riduce, ad esempio a causa del consumo di car-
burante, la spinta necessaria diminuisce e quindi la quota di tangenza tende
ad aumentare. Volendo mantenere una condizione di volo livellato ad inci-
denza constante, ad esempio in una lunga crociera, mano a mano che il peso
diminuisce per il consumo di carburante `e necessario diminuire la velocit` a e
la spinta disponibile, T
d
, secondo le seguenti leggi:
V
1
V
2
=
mg
1
mg
2
(5.44)
e
T
n
1
T
n
2
=
mg
1
mg
2
(5.45)
La gura ?? mostra la variazione della curva T
n
= f(V ) per diversi valori
del peso. Appare evidente come anche per il velivolo propulso a getto, le
condizioni di volo caratterizzate da velocit` a elevate sono poco inuenzate
dalla variazione di peso.
5.9 La stabilit`a propulsiva del velivolo a getto
Riportando sullo stesso graco le curve della spinta necessaria e disponibile
ad una certa quota e per un dato regime del motore, si osservano due in-
tersezioni tra le suddette curve corrispondenti ad altrettante condizioni di
volo livellato, la prima caratterizzata da una velocit` a V
A
> V
E
M
, la seconda
V
B
< V
E
M
. Analogamente a quanto detto per il velivolo ad elica le velocit` a
V
A
, e V
B
, rappresentano per quel dato valore della spinta disponibile, il re-
gime stabile e instabile rispettivamente.
Dalla gura ??, si pu` o vedere chiaramente come lintervallo delle velocit` a re-
lative a condizioni di volo instabili sia molto pi` u esteso rispetto al caso di un
velivolo propulso ad elica. Per un velivolo a getto si ha infatti che la V
E
M
pu` o
5.9. LA STABILIT
`
A PROPULSIVA DEL VELIVOLO A GETTO 61
Velocit, V
S
p
i
n
t
a
n
e
c
e
s
s
a
r
i
a
,
T
n
mg
Figura 5.10: Curva della spinta necessaria al variare del peso
arrivare no a valori dellordine di 1.7 V
st
, mentre per un velivolo propulso
ad elica in genere si arriva a V
E
M
= 1.3 V
st
. Questo fatto spiega come per un
velivolo a getto sia molto dicile manovrare alle basse velocit` a, anche se si `e
ben al di sopra della V
st
: levento critico infatti non `e lo stallo aerodinamico
ma le conseguenze dellinstabilit` a propulsiva. Per ovviare a questo proble-
ma, e spostare verso valori pi` u bassi della velocit` a la zona instabile della
curva, si ricorre allestensione dei ap: questi dispositivi infatti ad aumen-
tare la capacit` a portante dellala hanno il vantaggio di comprimere il ramo
instabile della curva verso valori pi` u bassi della velocit` a. Il confronto tra la
stabilit` a propulsiva del velivolo a getto con quello ad elica pu` o completarsi
modicando il diagramma della spinta ed esprimere, anche nel caso di un
velivolo a getto, sia la necessit` a che la disponibilit` a propulsiva in termini
di potenza. La curva della potenza necessaria `e chiaramente identica a quella
ottenuta per i velivoli propulsi ad elica, mentre per la potenza disponibile,
poich`e vale lipotesi di spinta costante con la velocit` a, si ha un andamento
62 CAPITOLO 5. IL VOLO LIVELLATO
S
p
i
n
t
a
n
e
c
e
s
s
a
r
i
a
e
d
i
s
p
o
n
i
b
i
l
e
,
T
n
,
T
d
T
n
T
d
V
st
V
B
V
B
V
E max
V
A
V
A
Velocit, V
Figura 5.11: Instabilit` a propulsiva dei velivoli a getto
lineare. La gura ?? mostra i diagrammi di potenza necessaria e disponibile
per entrambi i tipi di velivolo. Si pu` o notare dalla gura che una dierenza
di velocit` a V = V
A
V
A
, rispetto alla velocit` a di equilibrio, genera una
azione di richiamo pi` u intensa nei velivoli ad elica rispetto ai velivoli a getto,
e quindi anche nella regione in cui il velivolo mostra stabilit` a propulsiva,
il velivolo ad elica risulta avere una attitudine maggiore nel mantenere la
propria velocit` a di equilibrio.
5.10 Inuenza della congurazione
Le curve di potenza e spinta necessaria al volo sono fortemente inuenzate
dalla deessione delle superci di ipersostentazione. Modicando la con-
gurazione del velivolo, ad esempio attraverso lestensione aps, le dierente
distribuzione delle pressioni modica lentit` a delle forze aerodinamiche:
5.10. INFLUENZA DELLA CONFIGURAZIONE 63
P
o
t
e
n
z
a
n
e
c
e
s
s
a
r
i
a
e
d
i
s
p
o
n
i
b
i
l
e
,
P
n
,
P
d
Velocit, V
P
n
P
d
(getto)
P
d
(elica)
V
A
V
A
Figura 5.12: Instabilit` a propulsiva: confronto tra i due tipi di propulsione
1. La capacit` a portanti dellala aumentano: la stessa forza viene generata
ad una pressione dinamica (o velocit` a indicata) inferiore, oppure:
2. a parit` a di velocit` a lo stesso coeciente di portanza viene ottenuto con
un angolo di incidenza minore.
3. La deessione dei aps provoca sempre un aumento globale della re-
sistenza (con conseguente decadimento dellecienza aerodinamica)
e lequilibrio `e ristabilito esclusivamente attraverso un aumento del
regime del motore.
Inne, come accennato nel paragrafo precedente, `e opportuno mettere in
evidenza che lestensione dei aps riduce lampiezza della regione di insta-
bilit` a propulsiva. Per velivoli propulsi ad elica tale regione `e compresa tra
la velocit` a di stallo e quella di minima potenza, mentre per velivoli a getto
si estende no alla velocit` a di massima ecienza. Per questo motivo luso
64 CAPITOLO 5. IL VOLO LIVELLATO
del aps sui velivoli propulsi a getto, rappresenta un tema di particolare
interesse: attraverso luso di superci di ipersostentazione `e possibile volare
a velocit` a stabili ma relativamente basse.
Capitolo 6
Le prestazioni in volo
livellato
La rapida diusione delle applicazioni commerciali in campo aeronautico ha
reso necessario evidenziare, tra tutte le velocit` a appartenenti allinviluppo di
volo del velivolo, almeno due particolari valori di fondamentale importanza
sia per il progetto del velivolo sia per la pianicazione delle missioni.
Il primo dei suddetti valori, noto come velocit` a di massima autonomia chilo-
metrica, V
OSR
, `e quel valore di velocit` a che permette di realizzare la massima
distanza percorribile con unassegnata quantit` a di carburante, mentre il se-
condo, velocit` a di massima autonomia oraria, V
OSE
, consente di minimizzare
il consumo orario, ovvero massimizzare il tempo di permanenza in volo, in-
dipendentemente dalla distanza percorsa.
In questo capitolo verranno esaminati entrambi i problemi nel loro aspetto
generale allo scopo di individuare le condizioni che consentono di realizzare
tali velocit` a, sia per il velivolo propulso ad elica che per il velivolo propulso
a getto.
Il modello matematico utilizzato per lanalisi delle prestazioni dei velivoli
viene ricavato imponendo nelle equazioni (??) e (??) la condizione di volo
livellato, ovvero lipotesi di traiettorie stazionarie appartenenti al piano ver-
ticale e percorse a quota costante.
La risoluzione dei problemi legati allautonomia chilometrica ed oraria `e fun-
zione della modalit` a con cui il pilota mantiene la condizione di quota costan-
te. La variazione del peso, dovuta al consumo di carburante, dovr` a infatti
essere necessariamente compensata attraverso opportune azioni di controllo,
65
66 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
alle quali corrispondono le diverse strategie per il volo livellato, chiamate
programmi di volo, [?].
1. Programma di volo ad assetto costante.
La variazione del peso del velivolo viene compensata attraverso una
progressiva riduzione della portanza senza modicare lincidenza.
Appare evidente che, dovendo agire necessariamente sulla pressione di-
namica e dovendo mantenere la quota costante, il programma di volo
ad assetto costante `e caratterizzato da una progressiva diminuzione
della velocit` a. Tale riduzione di velocit` a viene associata ad una ri-
duzione della potenza (o della spinta) del motore al ne di assorbire
leccesso di potenza introdotto sia dalla riduzione della velocit` a sia
dalla variazione del peso.
2. Programma di volo a velocit` a costante.
La variazione del peso del velivolo viene compensata attraverso una
progressiva riduzione della portanza ottenuta riducendo lincidenza,
senza modicare la velocit` a. Tale riduzione di incidenza provoca una
riduzione della resistenza indotta la quale, a parit` a di velocit` a, com-
porta una riduzione della potenza (o della spinta) necessaria.
Il programma di volo a velocit` a costante `e dunque caratterizzato da
una progressiva riduzione della potenza (o della spinta) e dellincidenza
di volo.
3. Programma di volo a potenza (o spinta) costante. La variazione del
peso del velivolo viene compensata attraverso una progressiva riduzio-
ne della portanza ottenuta riducendo lincidenza. Tale riduzione di
incidenza provoca una riduzione della resistenza indotta. Leccesso di
potenza (o di spinta) cos` generato pu` o essere assorbito solamente at-
traverso un incremento di energia cinetica (la quota infatti non pu` o
variare). Di conseguenza durante un programma di volo a potenza (o
spinta) costante si riscontra un progressivo aumento della velocit` a al
variare del peso del velivolo.
6.1 Velivoli propulsi ad elica
Per lo studio delle prestazioni del velivolo ad elica si fa riferimento ad un
impianto propulsore dotato di elica a passo variabile, in cui la potenza, per
6.1. VELIVOLI PROPULSI AD ELICA 67
un certo intervallo dellinviluppo di volo, pu` o ritenersi indipendente dalla
velocit` a.
Dalle denizioni di potenza necessaria e potenza disponibile
P
n
= DV (6.1)
P
d
= T V (6.2)
e sotto lipotesi di traiettorie stazionarie (
V = = = 0) e appartenenti al
piano verticale ( = 0), il modello matematico costituito dalle (??) e (??)
diviene:
P
d
P
n
mg V sin = 0 (6.3)
L mg cos = 0 (6.4)
x V cos = 0 (6.5)
z +V sin = 0 (6.6)
Facendo inne riferimento ad una condizione di volo a quota costante ( =
0), il precedente modello si riduce al gruppo di equazioni che deniscono il
volo livellato:
P
d
= P
n
(6.7)
L = mg (6.8)
x = V (6.9)
Poiche le prestazioni sono strettamente legate al peso del velivolo, `e necessa-
rio completare il modello matematico introducendo una ulteriore relazione
che descriva la variazione di peso del velivolo in funzione del consumo di
carburante.
Indicando con
W = mg la variazione del peso nel tempo si ha, per il velivolo
ad elica, la seguente relazione:
W +k
c
P
d
p
= 0 (6.10)
Il termine k
c
, chiamato consumo specico, indica il consumo orario di carbu-
rante per ogni cavallo di potenza motrice sviluppata dal motore, ed `e denito
dalla seguente relazione:
k
c
=
k
h
P
e
(6.11)
68 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
dove con k
h
si indica il consumo orario espresso in kg/h. Il consumo spe-
cico `e un parametro importante in quanto rappresenta uno strumento per
valutare la bont` a relativa del motore. E facilmente intuibile infatti che un
motore che sviluppa una notevole potenza con un eccessivo consumo orario
(o viceversa un motore caratterizzato da un basso consumo orario ma anche
da una esigua potenza erogata) ha scarse possibilit` a di venire impiegato e,
attraverso il solo consumo orario o la sola potenza motrice, non `e possibile
valutare il rendimento del motore ne confrontare tra loro motori diversi o
motori uguali in diverse condizioni dimpiego.
Sotto lipotesi di diretta proporzionalit` a tra consumo orario e potenza ero-
gata, il consumo specico k
c
pu` o ritenersi costante e, per gli attuali motori
per aviazione generale, il suo valore varia tra 0.18 e 0.4 (kg/h)/Hp; un buon
valore di riferimento pu` o essere 0.25 (kg/h)/Hp.
6.1.1 Autonomia chilometrica
Per autonomia chilometrica (range) si intende la distanza percorribile dal
velivolo per una assegnata quantit` a di carburante consumato. Indicando
con R(t) lo spazio percorso ad un generico istante temporale t e ricordando
che in condizioni di volo livellato P
d
= P
n
= T
n
V , le equazioni (??), e (??)
divengono:
d R(t)
dt
= V (6.12)
d W
dt
=
k
c
P
d
p
(6.13)
Dividendo la prima equazione per la seconda si ottiene:
d R(t)
dW
=
p
V
k
c
P
n
=
p
k
c
T
n
(6.14)
inne, poich`e W/T
n
= E, si ha:
d R(t)
dW
=
p
E
k
c
W
(6.15)
Il termine d R(t)/dW `e chiamato autonomia chilometrica specica (specic
range), e rappresenta la distanza percorribile per unit` a di carburante consu-
mato.
6.1. VELIVOLI PROPULSI AD ELICA 69
Integrando lequazione (??), si ottiene lautonomia chilometrica, R, cio`e la
distanza percorribile per una assegnata variazione di peso dovuta al consumo
di carburante.
Indicando con W
f
il valore nale del peso e con W
i
il valore iniziale, si arriva
al seguente integrale:
R =
_
W
f
W
i
p
E
k
c
dW
W
(6.16)
la cui soluzione `e dipendente dal programma di volo prescelto.
Autonomia chilometrica ad assetto costante
Dallequazione (??), sotto lipotesi di k
c
ed
p
indipendenti dalla velocit` a,
ed imponendo la condizione di assetto costante (E = cost) si ricava:
R =
p
E
k
c
_
W
f
W
i
dW
W
(6.17)
da cui:
R =
p
E
k
c
ln
W
i
W
f
(6.18)
Sostituendo ad E lespressione data dalla (??), il valore dellautonomia
chilometrica per questo programma di volo pu` o quindi scriversi come:
R =
p
k
c
b
2
1 +b
4
1
_
C
D
0
K
ln
W
i
W
f
(6.19)
Il valore massimo dellautonomia chilometrica, R
M
, si ottiene per quel valore
della velocit` a (e quindi anche dellassetto) che annulla la derivata prima
rispetto a b della precedente equazione:
d R
d b
=
2b(1 +b
4
) 3 b
5
(1 +b
4
)
2
p
k
c
1
_
C
D
0
K
ln
W
i
W
f
(6.20)
ovvero per quel valore di b per cui si ha:
2b(1 +b
4
) 3 b
5
= 0 (6.21)
La soluzione fornisce i valori b
1
= 0, b
2
= 1, e b
3
= 1. Lunico valore
ammissibile, corrispondente ad una condizione operativa, risulta ovviamente
b = 1, e quindi:
R
M
=
p
k
c
1
2
_
C
D
0
K
ln
W
i
W
f
(6.22)
70 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Per un velivolo propulso ad elica la massima autonomia chilometrica (opti-
mum specic range) si ottiene mantenendo la velocit` a di ecienza massima,
V
OSR
= V
E
M
.
Il precedente risultato pu` o essere ritrovato intuitivamente osservando le-
quazione (??), in cui `e evidente la diretta proporzionalit` a tra lautonomia
chilometrica specica e lecienza aerodinamica.
Autonomia chilometrica a velocit`a costante
Dallequazione (??), sotto lipotesi di
p
e k
c
indipendenti dalla velocit` a, ed
imponendo la (??), si ricava:
R =
_
W
f
W
i
p
W
k
c
T
dW
W
=
p
k
c
_
W
f
W
i
dW
1/2SC
D
0
V
2
+
2 K W
2
SV
2
(6.23)
integrando rispetto al peso si ha:
R =
p
k
c
a
1
a
2
_
arctan
_
W
f
_
a
2
a
1
_
arctan
_
W
i
_
a
2
a
1
__
(6.24)
dove a
1
= 1/2SC
D
0
V
2
e a
2
= 2K/SV
2
sono termini costanti. Ricordando
inne che:
C
L
=
2W
SV
2
(6.25)
lespressione dellautonomia chilometrica a velocit` a costante pu` o scriversi
come:
R =
p
k
c
_
C
D
0
K
_
arctan
_
C
L
i
K
C
D
0
_
arctan
_
C
L
f
K
C
D
0
__
(6.26)
e quindi una volta scelta la velocit` a di volo risulta immediato il calcolo della
autonomia chilometrica.
Autonomia chilometrica a potenza costante
Per questo programma di volo lintegrale espresso dalla (??) assume la forma:
R =
p
E
k
c
_
W
f
W
i
V dW (6.27)
6.1. VELIVOLI PROPULSI AD ELICA 71
La soluzione in forma chiusa del precedente integrale non risulta immediata,
a causa delle variazioni della velocit` a con lassetto e con il peso. Il problema
viene quindi arontato ricorrendo a metodi graci oppure per via numerica.
Inuenza della quota sullautonomia chilometrica
Nel paragrafo ?? `e stato evidenziato come il rapporto P
n
/V rimanga co-
stante, per un assegnato valore dellincidenza, al variare della quota. Sotto
lipotesi di volo subsonico (fenomeni legati alla comprimibilit` a trascurabili)
ed osservando la (??) appare evidente che variazioni di autonomia chilome-
trica con la quota per velivoli propulsi ad elica possono essere causati solo
da variazioni di consumo specico e/o variazioni del rendimento dellelica.
6.1.2 Lautonomia oraria
Per autonomia oraria (endurance) si intende il tempo di permanenza in volo
per una assegnata quantit` a di carburante consumato. Invertendo lequazione
(??) si ottiene:
dt
d W
=
p
k
c
P
d
(6.28)
e inoltre in condizioni di volo livellato vale la seguente relazione:
P
n
= T
n
V =
W V
E
(6.29)
Combinando le due precedenti espressioni si arriva alla denizione di auto-
nomia oraria specica (specic endurance), ossia il tempo di volo per unit` a
di carburante consumato:
dt
d W
=
p
E
k
c
W V
(6.30)
Lautonomia oraria per unassegnata variazione di peso dovuta al consumo
di carburante si ottiene direttamente dal seguente integrale:
t =
_
W
f
W
i
p
E
k
c
V
d W
W
(6.31)
la cui soluzione `e legata al programma di volo prescelto.
72 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Autonomia oraria ad assetto costante
Dallequazione (??) imponendo lipotesi di assetto costante (E = cost) si
ottiene:
t =
p
E
k
c
_
W
f
W
i
d W
V W
(6.32)
Introducendo le equazioni (??) e (??) nella precedente si arriva a:
t =
p
b
S
k
c
2 (1 +b
4
)
4
_
C
D
0
K
3
_
W
f
W
i
d W
W
3
(6.33)
e quindi integrando rispetto al peso:
t =
2
p
b
S
k
c
(1 +b
4
)
4
_
C
D
0
K
3
_
1
_
W
f
W
i
_
(6.34)
Il valore massimo dellautonomia oraria, t
M
, si ottiene per quel valore della
velocit` a che annulla la derivata prima della precedente equazione:
d t
d b
=
(1 +b
4
) 4b
4
(1 +b
4
)
2
2
p
S
k
c
4
_
C
D
0
K
3
_
1
_
W
f
W
i
_
(6.35)
ovvero per quel valore di b per cui si ha:
1 3b
4
= 0 (6.36)
la cui soluzione fornisce il valore
4
3.
Il precedente risultato pu` o essere ritrovato osservando la (??). Si vede fa-
cilmente che lautonomia oraria assume il valore massimo quando si sceglie
di volare con lassetto corrispondente alla velocit` a di minima potenza ne-
cessaria, V = V
P
m
. Considerando la (??) si ha di nuovo che b = 1/
4
3 e
quindi:
t
M
=
0.4030
p
S
k
c
4
_
C
D
0
K
3
_
W
f
W
i
d W
W
3
(6.37)
da cui:
t
M
=
0.8059
p
S
k
c
4
_
C
D
0
K
3
_
1
_
W
f
W
i
_
(6.38)
6.1. VELIVOLI PROPULSI AD ELICA 73
Ricordando inne le espressioni (??) e (??), che legano i coecienti aerodi-
namici al parametro b, per un programma di volo ad assetto costante valgono
le seguenti relazioni:
C
L
(t
M
) =
_
3 C
D
0
K
=
3 C
L
|
E
M
(6.39)
C
D
0
(t
M
) =
1
4
C
D
(6.40)
C
D
i
(t
M
) =
3
4
C
D
(6.41)
Autonomia oraria a velocit`a costante
Introducendo la denizione di potenza necessaria nella (??) si ha:
t =
p
k
c
V
_
W
f
W
i
d W
a
1
+a
2
W
2
(6.42)
con procedimento analogo a quello visto nel paragrafo ??, per il calcolo del-
lautonomia chilometrica a velocit` a costante, si arriva al seguente risultato:
t =
p
k
c
V
_
C
D
0
K
_
arctan
_
C
L
i
K
C
D
0
_
arctan
_
C
L
f
K
C
D
0
__
(6.43)
Autonomia oraria a potenza costante
Dallequazione (??) ponendo P
n
= cost si ha:
t =
p
k
c
P
n
_
W
f
W
i
d W (6.44)
e indicando con W la variazione di peso del velivolo durante il segmento
di missione considerato si ottiene:
t =
p
W
k
c
P
n
(6.45)
74 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Inuenza della quota sullautonomia oraria
Poiche la potenza necessaria `e funzione della quota dalla quota attraverso la
radice quadrata dellinverso della densit` a relativa, come descritto dalla (??),
per un assegnato valore del peso e dellincidenza di volo lequazione (??)
diviene:
dt
d W
=
c
E
_
0
/
k
c
W V
0
(6.46)
Appare chiaro quindi che allaumentare della quota il rapporto
0
/ tende
a diminuire, abbassando conseguentemente il valore dellautonomia oraria:
il valore massimo dellautonomia oraria si ottiene dunque volando al livello
del mare (
0
/ = 1).
Nella pratica, un ulteriore vantaggio nel volare a bassa quota deriva dal-
landamento del consumo specico, il quale tende ad aumentare con la
quota.
6.2 Velivoli Propulsi a Getto
Imponendo lipotesi di volo livellato il modello matematico costituito dalle
equazioni (??) e (??) si riduce al seguente gruppo di equazioni:
T
n
= D (6.47)
L = mg (6.48)
x = V (6.49)
Il modello ottenuto viene completato introducendo la relazione che mette in
evidenza il legame tra la spinta erogata dal propulsore e la variazione di peso
del velivolo dovuta al consumo di carburante:
W +c T
n
= 0 (6.50)
dove il parametro c, chiamato consumo specico, `e la quantit` a di carburante
necessaria nellunit` a di tempo a generare un chilogrammo di spinta. Esso `e
denito dal rapporto:
c =
c
h
T
d
(6.51)
in cui c
h
`e il consumo orario misurato in Kg/s e T
d
`e la spinta erogata. Il
consumo specico dei motori a getto, misurato in Kg/(Kg s), `e legato ge-
neralmente al rapporto di diluizione (o di by-pass), il rapporto cio`e tra
6.2. VELIVOLI PROPULSI A GETTO 75
la massa daria che non subisce la combustione e la massa totale aspirata.
Il consumo specico pu` o considerarsi generalmente costante per certi inter-
valli dellinviluppo di volo; valori tipici vanno da 0.4 Kg/(Kg s), nel caso
di motori a reazione con alto rapporto di diluizione (turbo-fan), no a 1.2
Kg/(Kg s), nel caso invece di turboreattori monousso.
6.2.1 Autonomia chilometrica
Indicando con R(t) lo spazio percorso ad un generico istante temporale t, le
equazioni (??), e (??) divengono:
d R(t)
dt
= V (6.52)
d W
dt
= c T
n
(6.53)
Sotto lipotesi di volo livellato si ha che W/T
n
= E e la relazione precedente
pu` o riscriversi come:
d R(t)
dW
=
V E
c W
(6.54)
la quale rappresenta lautonomia chilometrica specica per il velivolo a getto.
Integrando lequazione (??), si ottiene la distanza percorribile, R, per una
assegnata variazione di peso dovuta al consumo di carburante. Indicando
con W
f
e W
i
il valore del peso nale ed iniziale rispettivamente, si ha:
R =
_
W
f
W
i
V E
c
dW
W
(6.55)
la cui soluzione `e legata al programma di volo prescelto.
Autonomia chilometrica ad assetto costante
Questo programma di volo `e caratterizzato da una continua riduzione della
velocit` a, e di conseguenza da una costante variazione del numero di Mach.
Nel caso di volo nel campo subsonico (M < 0.4) le variazioni dei coecienti
C
D
0
e c sono trascurabili. Considerando quindi che V = b V
E
M
e ricordan-
do lespressione (??), lequazione dellautonomia chilometrica pu` o scriversi
come:
R =
b
3
1 +b
4
1
c
_
C
D
0
K
_
W
f
W
i
V
E
M
d W
W
(6.56)
76 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Introducendo inne la denizione di V
E
M
, il precedente integrale diviene:
R =
b
3
1 +b
4
2
c
_
C
D
0
KS
4
K
C
D
0
_
W
f
W
i
d W
W
(6.57)
la cui soluzione
R =
2.828 b
3
_
W
i
_
W
f
_
(1 +b
4
) c
_
S (C
3
D
0
K)
1/2
(6.58)
consente di valutare la distanza percorribile da un velivolo a getto, per unas-
segnata variazione di peso del velivolo dovuta al consumo di carburante e
per un dato assetto, a cui corrisponde la velocit` a V = b V
E
M
.
Il valore massimo dellautonomia chilometrica, R
M
, si ottiene per quel valore
della velocit` a che annulla la derivata prima della precedente equazione:
d R
db
=
3b
2
(1 +b
4
) 4b
6
(1 +b
4
)
2
2.828
_
W
i
_
W
f
_
c
_
S (C
3
D
0
K)
1/2
(6.59)
ovvero per quel valore di b per cui si ha:
3b
2
(1 +b
4
) 4b
6
= 0 (6.60)
la cui soluzione fornisce il valore b =
4
3.
Il precedente risultato pu` o essere ritrovato a partire dalla (??): in condizioni
di volo livellato si ha che E = W/T
n
, e quindi il valore massimo dellauto-
nomia chilometrica specica si ha in corrispondenza del valore massimo del
rapporto T
n
/V (o equivalentemente quando `e massimo il rapporto E/
C
L
).
Il corrispondente valore della velocit` a si trova invece risolvendo il seguente
problema:
d
dV
V
T
n
= 0 (6.61)
dalla quale imponendo T
n
= AV
2
+BV
2
si ha:
d
dV
V
T
n
=
(AV
2
+BV
2
) V (2AV 2BV
3
)
(AV
2
+BV
2
)
2
= 0 (6.62)
La precedente espressione si annulla quando V
4
= 3B/A e poich`e V
E
M
=
4
_
B/A, la velocit` a di massima autonomia chilometrica `e data da:
V
OSR
=
4
3 V
E
M
(6.63)
6.2. VELIVOLI PROPULSI A GETTO 77
Il corrispondente valore del coeciente di portanza `e dato invece da:
C
L
|
OSR
=
_
C
D
0
3 K
=
1
3
C
L
|
E
M
(6.64)
Sostituendo il valore
4
3 nella (??) si ottiene il valore massimo della distanza
percorribile per un assegnato valore del consumo di carburante:
R =
1.612
_
W
i
_
W
f
_
c
_
S (C
3
D
0
K)
1/2
(6.65)
Autonomia chilometrica a velocit`a costante
Questo programma di volo `e caratterizzato da una continua riduzione della
spinta del propulsore per compensare la variazione di peso del velivolo.
Dallequazione (??), sotto lipotesi di c indipendente dalla velocit` a, impo-
nendo la condizione di velocit` a e quota costanti si ricava:
R =
V
c
_
W
f
W
i
dW
T
n
=
V
c
_
W
f
W
i
dW
1/2SC
D
0
V
2
+
2 K W
2
SV
2
(6.66)
integrando rispetto al peso si ha:
R =
V
c
a
1
a
2
_
arctan
_
W
f
_
a
2
a
1
_
arctan
_
W
i
_
a
2
a
1
__
(6.67)
dove a
1
e a
2
sono termini costanti.
La relazione precedente pu` o riscriversi come funzione del coeciente di
portanza, sostituendo le espressioni di a
1
e a
2
e la denizione di C
L
:
R =
V
c
_
C
D
0
K
_
arctan
_
C
L
i
K
C
D
0
_
arctan
_
C
L
f
K
C
D
0
__
(6.68)
e quindi una volta scelta la velocit` a di volo risulta immediato il calcolo della
autonomia chilometrica.
Autonomia chilometrica a spinta costante
Per questo programma di volo, il calcolo soluzione in forma chiusa dellin-
tegrale espresso dalla (??) non risulta di immediata soluzione. Il problema
viene arontato ricorrendo a metodi graci oppure per via numerica.
78 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Inuenza della quota sullautonomia chilometrica
Lequazione (??) mette in evidenza la relazione il legame di inversa propor-
zionalit` a tra lautonomia specica e il rapporto T
n
/V . Con riferimento ad
un assetto caratterizzato da una velocit` a generica V = b V
E
M
si ha che:
T
n
V
= AV +BV
3
= b (AV
E
M
+BV
3
E
M
) (6.69)
dalla quale, ricordando la (??), si ottiene
T
n
V
= b
_
_
A
4
_
B
A
+B
4
_
A
B
_
3
_
_
= 2b
A
4
_
mg C
D
0
K (6.70)
Allaumentare della quota e per quei valori del numero di Mach tali da
poter trascurare gli eetti della comprimibilit` a (C
D
0
= cost), poiche A =
1/2SC
D
0
il valore del rapporto T
n
/V tende a diminuire con la radice qua-
drata della densit` a dellaria. Ci` o comporta che allaumentare della quota,
per un dato valore dellassetto e mantenendo costante la spinta erogata dal
motore, il velivolo risulta essere equilibrato per valori della velocit` a sempre
pi` u elevati, aumentando cos` il valore dellautonomia chilometrica.
Nella pratica laumento di autonomia chilometrica con la quota risulta essere
maggiore di quello n qui valutato con in via teorica: un ulteriore contri-
buto allaumento dellautonomia chilometrica specica `e infatti dovuto alla
diminuzione del consumo specico del motore, considerato no ad ora co-
stante. Per una assegnata incidenza (ovvero per una determinata velocit` a
indicata), allaumentare della quota la spinta erogata tende a diminuire e
quindi si richiede un incremento del regime del motore per erogare la spinta
necessaria ad equilibrare la resistenza associata a tale assetto. Poiche nel
campo dei regimi normalmente usati per la crociera, il consumo specico
del motore a getto tende a diminuire notevolmente allaumentare dei giri (a
dierenza dei motori ad elica), ne consegue che, salendo a velocit` a indicata
costante, il consumo specico si riduce, con conseguente ulteriore aumento
dellautonomia chilometrica.
Per bassi valori della quota, per mantenere la velocit` a di massima autono-
mia chilometrica, il regime del motore richiesto non sar` a certamente quello
di minimo consumo specico; allo stesso modo, volendo mantenere alto il
regime del motore, per operare in condizioni di minimo consumo specico,
6.2. VELIVOLI PROPULSI A GETTO 79
la spinta erogata sar` a elevata costringendo il pilota a volare a velocit` a mag-
giori rispetto alla V
OSR
.
Questo porta ad aermare che per realizzare la condizione di massima au-
tonomia chilometrica `e necessario volare un valore della quota (legato chia-
ramente al tipo di velivolo e propulsore) generalmente elevata, tale per cui
il regime di minor consumo specico consenta lequilibrio tra spinta e resi-
stenza aerodinamica in corrispondenza dellincidenza di massima autonomia
chilometrica.
Alla luce delle precedenti considerazioni si pu` o concludere che, mano a ma-
no che il peso del velivolo diminuisce a causa del consumo di carburante,
lazione pi` u opportuna `e quella di salire di quota ad assetto costante e au-
mentando il regime del motore, piuttosto che ridurre il regime per mantenere
quota costante oppure aumentare la velocit` a a parit` a di regime. La massima
autonomia chilometrica si realizza quindi attraverso una salita a velocit` a ed
assetto costanti (cruise climb) in cui il regime del motore aumenta. Questa
procedura non `e tuttavia spesso consentita dai controllori del traco aereo
che tengono a mantenere ogni velivolo ad una quota assegnata.
6.2.2 Autonomia oraria
Dallequazione (??) si ottiene:
dt
d W
=
1
c T
n
(6.71)
e ricordando che E = W/T
n
si arriva alla denizione di autonomia oraria
specica, ossia il tempo di volo per unit` a di carburante consumato:
dt
d W
=
E
c W
(6.72)
Lautonomia oraria per un assegnata variazione di peso dovuta al consumo
di carburante si ottiene direttamente dal seguente integrale:
t =
_
W
f
W
i
E
c
d W
W
(6.73)
la cui soluzione `e legata al programma di volo prescelto.
80 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
Autonomia oraria ad assetto costante
Dallequazione (??) sotto lipotesi di c indipendente dalla velocit` a e impo-
nendo un determinato assetto (E = cost) si ottiene:
t =
E
c
_
W
f
W
i
d W
W
(6.74)
e quindi integrando rispetto al peso:
t =
E
c
ln
W
i
W
f
(6.75)
La precedente equazione permette di calcolare il tempo permanenza in volo
per un assegnato valore del consumo di carburante e per assegnato assetto.
Si vede chiaramente che il tempo di volo `e direttamente proporzionale al-
lecienza aerodinamica, quindi la condizione di massima autonomia oraria
per un velivolo propulso a getto si ha quando E = E
M
= 1/
_
4 C
D
0
K:
t
M
=
1
c
_
C
D
0
K
ln
W
i
W
f
(6.76)
e conseguentemente V
OSE
= V
E
M
.
Autonomia oraria a velocit`a costante
Mantenendo lipotesi di volo livellato in condizioni subsoniche, la variazione
di ecienza aerodinamica durante il volo `e causata solo dalla variazione di
peso. Imponendo la condizione E = W/T
n
si ha:
t =
_
W
f
W
i
d W
a
1
+a
2
W
2
=
1
c
1
a
1
a
2
_
arctan W
f
_
a
2
a
1
arctan W
f
_
a
2
a
1
_
(6.77)
e con procedimento analogo a quello visto nel paragrafo ??, si arriva al
seguente risultato:
t =
1
c
_
C
D
0
K
_
arctan
_
C
L
i
K
C
D
0
_
arctan
_
C
L
f
K
C
D
0
__
(6.78)
6.3. INFLUENZA DEL VENTO 81
Autonomia oraria a spinta costante
Dallequazione (??) ponendo T
n
= cost si ha:
t =
1
c T
n
_
W
f
W
i
d W (6.79)
Indicando con W la variazione di peso del velivolo durante il segmento di
missione considerato si ha:
t =
W
c T
n
(6.80)
Inuenza della quota sullautonomia oraria
La spinta necessaria, in assenza di fenomeni di comprimibilit` a, `e indipenden-
te dalla densit` a (e quindi dalla quota): in base alla (??) lautonomia oraria
non dipende dalla quota.
6.3 Inuenza del vento
Nel caso la massa di aria allinterno della quale si muove il velivolo abbia
una sua propria velocit` a, concorde o discorde rispetto a quella del velivolo,
la velocit` a che il velivolo stesso deve sviluppare per realizzare la massima
autonomia chilometrica non si identica pi` u con la velocit` a in cui si ha la
condizione di E
M
(nel caso di velivoli ad elica) o di (E/
C
L
)
M
(nel caso di
velivoli a getto). Di conseguenza le corrispondenti incidenze non sono quindi
pi` u direttamente individuabili sulla polare o sulla curva di potenza e spinta
necessaria.
Modicando tuttavia le curve P
n
= f(V ) e T
n
= f(V ) come in gura ?? `e
ancora possibile individuare il valore della velocit` a che consente di realizzare
la massima autonomia chilometrica in presenza di turbolenza caratterizzata
da una data intensit` a. Lorigine degli assi viene traslata di una quantit` a pari
allintensit` a della velocit` a del vento verso a destra, in caso di vento contrario,
oppure verso sinistra se il vento `e a favore.
Tracciando una semiretta uscente dalla nuova origine degli assi e tangente
alla curva della potenza (o della spinta necessaria per un velivolo a getto), si
pu` o determinare la velocit` a che consente la massima autonomia chilometrica
con una data velocit` a del vento.
82 CAPITOLO 6. LE PRESTAZIONI IN VOLO LIVELLATO
V
OSR
V
OSR
V
OSR
V
V
W
V
W
0
D
Figura 6.1: Variazione della V
OSR
in presenza di vento
E importante osservare che per realizzare la massima autonomia chilometri-
ca con vento contrario `e necessario aumentare la velocit` a e conseguentemente
anche la potenza (o la spinta) erogata. Il conseguente aumento di consumo
orario viene per` o compensato da una minore durata di esposizione al ven-
to contrario per cui il consumo chilometrico risulta minore di quello che si
realizzerebbe mantenendo la velocit` a di massima autonomia chilometrica in
assenza di vento. Nel caso di vento in coda, un analogo ragionamento mette
in evidenza che `e necessario ridurre invece la velocit` a (e quindi il regime del
motore) per volare in condizioni di massima autonomia chilometrica.
Poiche la velocit` a di massima autonomia chilometrica varia in funzione del
vento, e il vento presenta continue variazioni in intensit` a durante le missioni,
risulta assai poco pratico costruire un insieme di tabelle che forniscano, per
ogni valore dellintensit` a del vento, la velocit` a attuale di massima autono-
mia chilometrica. Per ottimizzare la crociera infatti si preferisce mantenere
un particolare valore della velocit` a indicata che coincide con la velocit` a di
massima autonomia chilometrica in presenza di una componente di vento
contrario di circa 100 nodi. Tale valore, noto come velocit` a di Long Range,
risulta essere maggiore della V
OSR
in assenza di vento. Mantenendo pertanto
6.3. INFLUENZA DEL VENTO 83
tale velocit` a, in assenza di vento, si assicura una elevata percentuale della
massima autonomia chilometrica assoluta, mentre in presenza di una com-
ponente contraria di vento tale velocit` a consente allaereo di approssimarsi
alla condizione di massima autonomia chilometrica con vento contrario di
100 nodi.
Nei manuali di impiego di quasi tutti gli aerei commerciali sono ripor-
tate delle particolari tabelle di crociera che contengono i parametri per
leettuazione di una crociera alla velocit` a di Long Range.
Capitolo 7
Linviluppo di volo
Fino a questo punto della trattazione una delle ipotesi principali per lana-
lisi del comportamento del velivolo `e stata quella di considerare un volo in
cui laccelerazione del baricentro `e nulla. Tuttavia, sebbene tale ipotesi pu` o
considerarsi valida (specialmente per i velivoli commerciali) per gran parte
della durata della missione, ci sono dei casi il velivolo `e soggetto a delle sol-
lecitazioni che derivano da accelerazioni indotte dal pilota (in caso di volo
manovrato) o dalle rache (in caso di volo allinterno di zone turbolente).
In tutte queste situazioni le strutture (e anche i passeggeri) subiscono delle
sollecitazioni pi` u gravose rispetto al volo livellato in aria calma.
7.1 Il fattore di carico
Il parametro utilizzato per valutare lentit` a delle suddette sollecitazioni `e il
fattore di carico, n, denito come il rapporto tra la portanza sviluppata dalle
superci portanti ed il peso del velivolo:
n =
L
mg
(7.1)
Esso assume il valore 1 in volo livellato, e valori maggiori o minori a seconda
della portanza necessaria per equilibrare il la componente di peso lungo la
normale alla direzione del moto; come caso particolare, il valore zero viene
ottenuto quando si realizzano le condizioni di assenza di peso.
La determinazione del fattore di carico pu` o essere fatta anche considerando
85
86 CAPITOLO 7. LINVILUPPO DI VOLO
Figura 7.1: Fattore di carico durante la manovra di virata
il rapporto, sempre adimensionale, tra laccelerazione cui `e sottoposto il
velivolo e laccelerazione di gravit` a terrestre, g.
In questo capitolo verranno esaminate le principali condizioni di volo in cui
si riscontra un valore del fattore di carico diverso da uno:
1. La virata: dalla gura ?? il rapporto L/mg `e facilmente ricavabile
scrivendo lequazione di equilibrio lungo la direzione della portanza:
n =
L
mg
=
1
cos
(7.2)
`e importante osservare che il fattore di carico non dipende dal peso
del velivolo ma esclusivamente dalangolo di bank con cui si eettua la
virata.
2. La richiamata: con riferimento alla g ??, nel punto pi` u basso della
richiamata la portanza che il velivolo deve sviluppare `e massima, ed `e
data dalla somma del peso del velivolo e la forza centrifuga associata
alla traiettoria curvilinea. Indicando con R il raggio di curvatura della
traiettoria, il corrispondente valore del fattore di carico `e quindi dato
7.2. IL DIAGRAMMA DI MANOVRA 87
L
mg
mV
2
R
R
Figura 7.2: Fattore di carico durante la manovra di richiamata
da:
n =
L
mg
= 1 +
V
2
g R
(7.3)
3. Salita e discesa: dato langolo che rappresenta la pendenza della
traiettoria angolo di pendenza della traiettoria di salita o di discesa, il
fattore di carico si esprime, in base alla gura ??, attraverso la seguente
relazione:
n =
L
mg
= cos (7.4)
Le prestazioni dei velivoli relativamente alle condizioni sopra descritte ver-
ranno analizzate in dettaglio nei capitoli successivi.
7.2 Il diagramma di manovra
Dalla denizione di fattore di carico espressa dalla (??) ed introducendo il
valore massimo del coeciente di portanza si ha:
n =
L
mg
=
SV
2
C
L
M
2mg
(7.5)
Riportando in un piano cartesiano (V, n) la precedente espressione, ed im-
ponendo il valori massimo e minimo ammissibile per il fattore di carico (per
88 CAPITOLO 7. LINVILUPPO DI VOLO
L
mg
g
V
Figura 7.3: Fattore di carico durante la manovra di salita
un velivolo da trasporto sono n
M
= 2.5 e n
m
= 1.5), si ottiene il diagramma
riportato in gura ?? noto come diagramma di manovra.
Alcune considerazioni sui punti caratteristici del diagramma:
1. Punto S: `e dato dallintersezione della curva n = f(V ) con la retta
n = 1. La corrispondete velocit` a V
S
rappresenta, in congurazione
pulita, la velocit` a minima alla quale `e possibile sostenere il velivolo.
Per valori inferiori della velocit` a il volo livellato non `e possibile.
2. Punto A: `e dato dallintersezione della curva n = f(V ) con la retta
n = n
M
= 2.5. La corrispondente velocit` a V
A
, chiamata velocit` a di
manovra, `e la minima velocit` a alla quale il velivolo pu` o raggiungere il
valore massimo del fattore di carico. E importante nel progetto delle
superci di controllo in quanto rappresenta anche la massima velocit` a
alla quale `e possibile utilizzare la completa deessione delle superci
mobili.
3. Punto C: punto di progetto di crociera. La corrispondente velocit` a V
C
`e la massima velocit` a ammissibile per la crociera.
4. Punto D: punto di aondata. La corrispondente velocit` a V
D
, chiama-
ta velocit` a di aondata, rappresenta lestremo limite strutturale del
velivolo. Non rappresenta una velocit` a operativa.
7.2. IL DIAGRAMMA DI MANOVRA 89
Velocit, V
F
a
t
t
o
r
e
d
i
c
a
r
i
c
o
,
n
V
S
V
A
V
C
V
D
A C D
n = 1
n = 2.5
n = 1
A
G F G
V
S0
V
FE
S
S
0
Figura 7.4: Il diagramma di manovra
5. Punto S
0
: `e dato dallintersezione della curva n = f(V, C
L
M
flap
) con
la retta n = 1. La corrispondente velocit` a V
S
0
rappresenta la velocit` a
minima alla quale `e possibile sostenere il velivolo con i aps estratti,
mentre la velocit` a V
FE
rappresenta la massima velocit` a alla quale `e
ammesso volare con aps estratti; il suo valore dipende da tipo di
velivolo.
6. Tratto GF: rappresenta le condizioni in cui il valore del fattore di carico
diviene negativo. Nei velivoli commerciali a partire dal punto G per
velocit` a comprese tra V
C
e V
D
, il fattore di carico viene fatto variare
linearmente no ad annullarsi alla velocit` a V
D
per evitare eccessive
sollecitazioni alla struttura.
90 CAPITOLO 7. LINVILUPPO DI VOLO
7.3 Il diagramma di raca
In questo paragrafo si vuole valutare leetto dalle rache sul velivolo. In
aria turbolenta infatti, allinterno della massa daria in cui si muove il velivolo
esistono delle componenti di velocit` a che sommate alla velocit` a vera del
velivolo provocano delle variazioni di incidenza e conseguentemente delle
variazioni di fattore di carico.
Dato lo scopo didattico della presente trattazione, si ipotizza una raca
istantanea agente uniformemente su tutto il velivolo. Inoltre si ipotizza
che il velivolo non abbia una sua inerzia aerodinamica e quindi il campo
aerodinamico dovuto alla raca si stabilisca istantaneamente.
Si consideri un velivolo in volo livellato a velocit` a V ; una raca di intensit` a
w
g
proveniente dal basso provoca una variazione di incidenza pari a:
w
g
V
(7.6)
Conseguentemente il coeciente di portanza passa da un valore C
L
ad un
valore superiore C
L
; sotto lipotesi di velocit` a costante, dalla denizione di
stessa di portanza e ricordando la seconda equazione del volo livellato si
ricava:
n =
L
mg
=
1/2 SV
2
C
L
1/2 SV
2
C
L
=
C
L
C
L
(7.7)
o anche:
n = 1 +
C
L
C
L
(7.8)
dove con C
L
si indica la variazione di coeciente di portanza introdotta
dalla raca.
Indicando con C
L
la pendenza della curva di portanza del velivolo si arriva
a:
C
L
= C
L
= C
L
w
V
(7.9)
e inne:
n = 1 +
SV
2
C
L
2 mg
= 1 +
SV C
L
2 mg
w
g
(7.10)
Dato un velivolo in volo in aria turbolenta `e possibile a questo punto trarre
le seguenti conclusioni sulleetto di una raca verticale di intensit` a w
g
:
1. La variazione di fattore di carico `e direttamente proporzionale alla
velocit` a della raca w
g
; questo risultato mette in evidenza come sia
7.3. IL DIAGRAMMA DI RAFFICA 91
importante, al ne di contenere le sollecitazioni sulla struttura, evitare
le zone di forte turbolenza atmosferica.
2. La variazione di fattore di carico `e direttamente proporzionale alla
velocit` a del velivolo; unazione opportuna da parte del pilota nellat-
traversare zone di turbolenza consista quindi nel ridurre la velocit` a di
volo.
3. La variazione di fattore di carico `e inversamente proporzionale al carico
alare mg/S; le accelerazioni a cui `e sottoposto un aereo in aria agitata
saranno quindi tanto pi` u limitate quanto maggiore `e il suo peso.
4. La variazione di fattore di carico `e direttamente proporzionale alla
densit` a; le sollecitazioni maggiori a parit` a di condizioni meteorologiche
si riscontrano a bassa quota.
In fase di progetto per lanalisi della variazione del fattore di carico sotto
lazione di una raca verticale, si fa riferimento a prescrizioni regolamentari
che prevedono tre valori di riferimento per w
g
: 25, 50, 66 ft/s. Introdu-
cendo i suddetti valori (considerando rache ascendenti e discendenti) nella
(??) e riportando in un piano cartesiano la funzione n = f(V, w
g
), si ottie-
ne il diagramma di raca mostrato in gura ??. I limiti del diagramma
di raca sono stati deniti partendo dalla considerazione che `e molto im-
probabile che due eventi critici per il velivolo (velocit` a prossima alla V
D
e una raca severa) si verichino contemporaneamente. Di conseguenza,
alle alte velocit` a si prevedono rache di intensit` a minore e viceversa. Un
importante valore della velocit` a che deriva dalla costruzione del diagramma
di raca `e la velocit` a V
B
, denita come la velocit` a di progetto per la mas-
sima intensit` a di raca. E la velocit` a che corrisponde, sul diagramma di
raca, allintersezione tra la curva (??) in cui `e stato imposto w
g
= 66 ft/s
e la curva n = f(V, C
L
M
). Essa rappresenta la minima velocit` a alla quale il
pilota deve portare il velivolo al ne di proteggere il velivolo dallo stallo: la
velocit` a di stallo infatti aumenta con la radice del fattore di carico. Tuttavia,
lincremento di fattore di carico dovuto alla raca pu` o portare il velivolo al
di sopra dei suoi limiti strutturali. Di conseguenza, le velocit` a di volo in
atmosfera turbolenta sono il compromesso tra due esigenze contrastanti: a)
proteggere il velivolo dallo stallo indotto da una raca verticale ascendente
(e quindi si impone una velocit` a minima V
B
), b) proteggere il velivolo da
eccessive sollecitazioni strutturali (si impone quindi un massimo al valore di
92 CAPITOLO 7. LINVILUPPO DI VOLO
0 10 20 30 40 50 60 70 80
1
Velocit, V
F
a
t
t
o
r
e
d
i
c
a
r
i
c
o
,
n
66 ft/s
50 ft/s
25 ft/s
Figura 7.5: Il diagramma di raca
V
B
).
Riguardo alle rache orizzontali, il loro eetto si manifesta attraverso una
variazione della velocit` a piuttosto che dellangolo dincidenza, e per questa
ragione i carichi introdotti non sono tali da pregiudicare la resistenza strut-
turale. Per questo tipo di rache `e invece interessante studiare la risposta
del velivolo, specialmente alle basse velocit` a. Essa `e strettamente legata ai
parametri geometrici ed aerodinamici ma presenta delle caratteristiche co-
muni a tutti i velivoli. Si immagini ad esempio un velivolo in condizione
di volo livellato perturbato da una raca orizzontale. La conseguente va-
riazione della velocit` a del velivolo provoca unalterazione delle condizioni di
equilibrio; in particolare se la raca orizzontale provoca una riduzione della
velocit` a, e di conseguenza anche una riduzione delle forze aerodinamiche, il
velivolo accelera in modo concorde con la direzione del moto (a causa dellec-
cesso di spinta) e verso il basso (a causa della diminuzione di portanza) no a
raggiungere una nuova condizione di equilibrio; indicando con u
g
lintensit` a
7.3. IL DIAGRAMMA DI RAFFICA 93
della raca, la velocit` a del velivolo rispetto allaria pu` o scriversi come:
V
= V +u
g
(7.11)
e conseguentemente lequazione di equilibrio lungo la normale alla direzione
del moto diviene:
1
2
SV
2
C
L
= mg (7.12)
Il fattore di carico sar` a dato da:
n =
L
mg
=
(V +u
g
)
2
V
2
= 1 +
2 u
g
V
+
u
2
g
V
2
(7.13)
In conclusione laumento o la diminuzione del fattore di carico a causa di una
raca orizzontale risulter` a essere direttamente proporzionale alla velocit` a
della raca ma, contrariamente a quanto avviene in presenza di una raca
verticale, inversamente proporzionale alla velocit` a del velivolo.
Capitolo 8
Il volo su traiettorie di salita
Nel capitolo ?? `e stato visto come uno dei modi per possibili per gestire lec-
cesso di energia introdotto dalla dierenza tra potenza (o spinta) disponibile
e necessaria sia quello di utilizzare il suddetto eccesso per incrementare le-
nergia potenziale del velivolo, immettendolo in una traiettoria di salita.
Il metodo alternativo per realizzare un incremento di quota consiste nel con-
ferire al velivolo un assetto pi` u cabrato, utilizzando solamente la velocit` a;
questo processo `e tuttavia un fenomeno transitorio ed `e limitato allinter-
vallo temporale in cui la riduzione energia cinetica associata alla manovra si
trasforma in energia potenziale.
Il corretto volo in salita `e invece un processo stazionario, caratterizzato an-
cora da accelerazioni nulle, durante il quale leccesso di potenza (o di spinta)
viene trasformato in energia potenziale; questo consente, alla ne della salita
il mantenimento della nuova quota e della velocit` a.
In questo capitolo vengono descritte, con riferimento a velivoli ad elica e a
getto, le principali caratteristiche del volo in salita introducendo inoltre, rela-
tivamente ai velivoli commerciali, alcune importanti considerazioni operative
[?].
8.1 Equazioni Caratteristiche
Si consideri un velivolo in condizioni di salita con traiettoria rettilinea a ve-
locit` a costante. Langolo , individuato dalla direzione della velocit` a e dalla
direzione orizzontale locale ed in precedenza gi` a denito come pendenza del-
la traiettoria, nei particolari problemi di volo in salita `e noto come angolo
95
96 CAPITOLO 8. IL VOLO SU TRAIETTORIE DI SALITA
L
mg
T
D
g
V
Figura 8.1: Azioni sul velivolo in condizioni di salita
di rampa.
La gura ?? mostra linsieme delle forze agenti sul velivolo, la cui natura
non presenta variazioni rispetto al volo livellato. Una dierenza sostanzia-
le, introdotta proprio dallangolo di rampa, riguarda la direzione della forza
peso. Essa infatti agendo sempre lungo la verticale locale, nel sistema di ri-
ferimento assi vento pu` o scomporsi nelle due seguenti componenti: la prima
normale alla direzione del moto, che rappresenta il peso apparente dellaereo
mg cos , la seconda parallela e diretta nel verso opposto della spinta, pu` o
considerarsi alla stregua di un termine di resistenza aggiuntivo, mg sin .
Anche il velivolo percorra una traiettoria di salita `e necessario che la por-
tanza sia sempre tale la componente del peso normale alla traiettoria; inoltre
anche il moto sia uniforme,
V = 0, la spinta dei motori deve essere tale
compensare la somma della resistenza aerodinamica e la componente del pe-
so che si oppone allavanzamento.
Alla luce di queste considerazioni, le equazioni di equilibrio del volo in salita
sono facilmente ricavabili dalla gura ??. Introducendo infatti nel modello
matematico espresso dalle equazioni (??) e (??) le ipotesi di moto stazionario
(
V = = = 0) e appartenente al piano verticale ( = 0), ma permettendo
8.1. EQUAZIONI CARATTERISTICHE 97
variazioni di quota ( = 0), si ottiene:
T D mg sin = 0 (8.1)
L mg cos = 0 (8.2)
x V cos = 0 (8.3)
z +V sin = 0 (8.4)
La seconda delle precedenti equazioni mette in chiara evidenza come la por-
tanza richiesta durante il volo in salita sia minore rispetto del volo livellato.
Ci` o `e dovuto al fatto che, data la presenza dellangolo , la portanza non
deve equilibrare tutto il peso come nel volo livellato ma solo la sua compo-
nente lungo la normale alla direzione del moto.
Al contrario la spinta richiesta `e maggiore: essa deve infatti equilibrare non
solo la resistenza aerodinamica, ma anche la componente del peso lungo la
traiettoria.
8.1.1 La velocit`a di salita
Moltiplicando entrambi i membri dellequazione (??) per la velocit` a, e te-
nendo conto della (??), si ottiene lequazione di equilibrio lungo la direzione
del moto espressa in termini di potenza:
TV DV mg V sin = P
d
P
n
0
+mg V
z
= 0 (8.5)
Questa espressione mette in chiara evidenza il concetto espresso nel prece-
dente paragrafo: anche il velivolo possa percorrere una traiettoria di salita
la potenza disponibile deve essere pari somma di due contributi: 1) la po-
tenza necessaria ad un volo livellato caratterizzato dalla stessa velocit` a, pi` u
2) la potenza necessaria a sollevare il velivolo con una assegnata velocit` a
verticale. Esplicitando V
z
dalla (??) si ottiene:
V
z
=
P
d
P
n
0
mg
(8.6)
Poiche la velocit` a verticale risulta direttamente proporzionale alleccesso di
potenza ed inversamente proporzionale al peso del velivolo, appare eviden-
te che, per ottenere le condizioni di massima velocit` a ascensionale, si deve
cercare lincidenza per cui la dierenza tra potenza disponibile e potenza
necessaria al volo livellato assume il suo massimo valore.
98 CAPITOLO 8. IL VOLO SU TRAIETTORIE DI SALITA
Il problema a questo punto viene trattato separatamente per i due tipi di
velivolo: il velivolo propulso ad elica infatti dimostra il massimo eccesso di
potenza ad incidenze prossime a quella di minima potenza necessaria, men-
tre per il velivolo a getto si ha ad incidenze inferiori a quella di massima
ecienza.
8.1.2 Langolo di rampa
Langolo di rampa si ricava facilmente dallequazione (??):
sin =
T D
mg
(8.7)
e risulta direttamente proporzionale alleccesso di spinta ed inversamente
proporzionale al peso del velivolo. Appare quindi evidente che, per ottenere
le condizioni di massima pendenza della traiettoria, si deve volare allinci-
denza per cui la dierenza tra la spinta disponibile e spinta necessaria al
volo orizzontale assume il suo valore massimo.
Anche il problema della salita con il massimo angolo di rampa `e legato al
tipo di propulsione, e verr` a trattato separatamente per le due categorie di
velivoli.
8.2 Velivoli Propulsi ad Elica
Dai diagrammi delle curve della potenza necessaria e disponibile `e possibile
individuare, per ogni valore di velocit` a lungo la traiettoria, il valore del-
leccesso di potenza. Tale valore, una volta diviso per il peso del velivolo,
fornisce direttamente il valore della velocit` a verticale ottenibile.
Con procedimento analogo a quello visto per il volo librato, riportando sul-
lasse delle ascisse di un diagramma cartesiano i valori della velocit` a lungo
la direzione orizzontale, V
o
= V cos , e sulle ordinate la velocit` a verticale,
V
z
, si ottiene il graco della polare delle velocit` a del velivolo.
La sommit` a di tale curva, individua sulle ordinate lintensit` a della massima
velocit` a verticale (o variometrica); essa per un assegnato valore della poten-
za disponibile si realizza alla velocit` a di minima potenza necessaria minima,
condizione per la quale si riscontra il massimo valore delleccesso di potenza.
Tale velocit` a, indicata con V
y
, `e denita come la velocit` a di salita rapida
8.3. VELIVOLI PROPULSI A GETTO 99
e rappresenta il valore della velocit` a che consente il maggior incremento di
quota nel tempo; `e generalmente utilizzata per tutte le fasi della missione in
cui `e necessario raggiungere il pi` u rapidamente possibile un assegnato livello
di volo.
La seconda importante condizione di salita `e rappresentata invece da quel
valore della velocit` a che permette di realizzare la massima pendenza della
traiettoria, massimizzando quindi il rapporto tra la distanza percorsa in ver-
ticale e quella contemporaneamente percorsa in orizzontale. Essa `e denita
come velocit` a di salita ripida, V
x
, e si ricava direttamente dalla polare del-
la velocit` a tracciando dallorigine degli assi la tangente alla curva. Questa
condizione `e utilizzata generalmente per il superare ostacoli vicini o in tutti
i casi in cui si rende necessario sviluppare il massimo incremento di quota
rispetto allo spazio percorso rispetto al suolo.
8.2.1 Inuenza della quota e del peso
La dipendenza tra la velocit` a verticale e la quota `e legata sia alle prestazioni
del motore (la potenza disponibile diminuisce con la quota e quindi anche
leccesso di potenza) sia allaumento della potenza necessaria che, come visto
in precedenza, aumenta con
.
Anche il legame tra il peso del velivolo e la velocit` a verticale coinvolge due
aspetti diversi; 1) un aumento di peso produce una proporzionale diminuzio-
ne della V
z
: il termine mg `e infatti presente al denominatore dellequazione
(??) e 2) allaumentare del peso aumenta anche la potenza necessaria al volo
orizzontale, P
n
0
.
Si conclude osservando quindi che, a dierenza della velocit` a massima rag-
giungibile in volo livellato (inuenzata dal peso in modo trascurabile), la
velocit` a verticale `e invece molto sensibile alle variazioni di peso.
8.3 Velivoli propulsi a getto
Anche per velivoli propulsi a getto la velocit` a verticale si esprime attraverso
leccesso di potenza. In questo caso tuttavia, mentre la curva P
n
= f(V )
`e identica a quella dei velivoli ad elica, la curva della potenza disponibile,
sotto lipotesi di spinta indipendente dalla velocit` a, `e invece rappresentata
da una semiretta uscente dallorigine la cui pendenza `e proporzionale alla
spinta erogata.
100 CAPITOLO 8. IL VOLO SU TRAIETTORIE DI SALITA
La velocit` a di salita rapida si ottiene gracamente proiettando sullasse delle
ascisse il punto di tangenza tra la curva P
n
= f(V ) e la retta parallela alla
semiretta delle potenze disponibili P
d
= T
d
V . La velocit` a di salita rapida `e
superiore alla velocit` a di ecienza massima, e quindi notevolmente superiore
alla corrispondente per un velivolo propulso ad elica; la gura ?? mette in
evidenza questo aspetto.
Questa dierenza `e ancora pi` u evidente nella salita ripida. Questa infatti nel
velivolo ad elica si realizza per condizioni di volo prossime allo stallo, mentre
per il velivolo a getto la salita con la massima pendenza della traiettoria si
realizza ad una velocit` a molto vicina alla velocit` a di ecienza massima.
Mano a mano che il velivolo sale, la velocit` a di salita rapida idonea allo
scopo diminuisce e tende a raggiungere la velocit` a di ecienza massima in
corrispondenza della quota di tangenza; in tale condizione infatti lunica in-
cidenza ammissibile per il volo `e quella di massima ecienza. Alla luce di
tutto ci` o `e possibile concludere che, contrariamente a quanto accade nei ve-
livoli ad elica, la salita rapida nei velivoli a getto, si eettua attraverso una
progressiva diminuzione della velocit` a lungo la traiettoria.
8.3.1 Inuenza della quota e del peso
Anche nel caso di velivoli a getto la velocit` a verticale diminuisce con la quota,
anche se in modo meno evidente rispetto ai velivoli ad elica. Ci` o `e dovuto
alla riduzione della spinta disponibile causata dallo spostamento del punto
di minimo consumo specico. Per questo motivo i velivoli a getto sono pi` u
adatti alla salita ad alta quota di quanto lo siano quelli propulsi ad elica.
Riguardo al peso, ogni aumento ha una inuenza notevole sulla velocit` a
verticale, in particolar modo alle quote prossime alla quota di tangenza.
Viceversa, a bassa quota, il peso ha poca inuenza sulla potenza necessaria
e quindi la V
z
`e inversamente proporzionale al peso.
8.4 Confronto tra velivoli ad elica e a getto
Mettendo a confronto le prestazioni dei velivoli caratterizzati da dierenti
propulsioni, si riscontrano le seguenti dierenze per il volo in salita:
1. La velocit` a indicata salita rapida del velivolo a getto, a parit` a di altre
condizioni, `e superiore a quella dellaereo con propulsione ad elica.
8.4. CONFRONTO TRA VELIVOLI AD ELICA E A GETTO 101
2. La velocit` a verticale di un velivolo a getto `e meno sensibile ad una
correzione della velocit` a indicata di salita di quanto lo sia invece sul
velivolo ad elica, dove ad una variazione, anche piccola, di velocit` a
indicata corrisponde una apprezzabile variazione di V
z
.
3. Nei velivoli a elica, la velocit` a di salita rapida si ottiene per un valore
dellincidenza superiore a quella di ecienza massima e prossima a
quella cui corrisponde (E/
C
L
)
M
, mentre nei velivoli a getto si ha
per unincidenza inferiore a quella di E
M
, in prossimit` a della massima
autonomia chilometrica.
4. Aumentando il regime del motore nei velivoli a getto velocit` a di salita
rapida aumenta, mentre nei velivoli ad elica rimane pressoche costante.
5. Allaumentare della quota, per un velivolo a getto, la velocit` a indicata
di salita rapida diminuisce e tende verso la velocit` a di massima e-
cienza, mentre nel velivolo ad elica si mantiene pressoche costante con
la quota no al raggiungimento della quota di tangenza.
Al ne di rappresentare chiaramente le dierenze, nella gura ?? sono state
rappresentate sullo stesso graco sia la curva della potenza necessaria, sia
quella di potenza disponibile relative ai due tipi di propulsione.
8.4.1 Considerazioni operative
Alla luce delle precedenti considerazioni verranno esaminati gli aspetti ope-
rativi principali della salita di un velivolo a getto, ricordando che lobiettivo
in una traiettoria di salita `e quello di ottimizzare la velocit` a verticale, la
velocit` a orizzontale e il consumo di carburante.
Appare subito chiaro che, non potendo soddisfare contemporaneamente tutti
i suddetti requisiti, una sorta di compromesso `e indispensabile. Loperazione
da fare sar` a quindi quella di ottimizzare una delle prestazioni, rinunciando
cos`, in base alle condizioni di utilizzo del velivolo, alle rimanenti.
Limpiego dei velivoli a getto a bassa quota non risulta conveniente, di con-
seguenza si cerca di raggiungere velocemente la quota operativa selezionando
il valore massimo del regime dei motori. Tale regime non comporta general-
mente un elevato aumento di consumo specico (i motori a getto lavorano
meglio agli alti regimi), e comunque sia, leventuale svantaggio dovuto alle-
rogazione di una spinta maggiore viene compensato dai vantaggi, in termini
102 CAPITOLO 8. IL VOLO SU TRAIETTORIE DI SALITA
V
V
y
P
n
P
d
P
d
P
d
P
d
P
d
Elica
Getto
V
y
V
y
Figura 8.2: Eetto della quota (o regime motore) sulla velocit` a di salita
rapida
di autonomia chilometrica, di una crociera a quota elevata.
E inoltre importante sottolineare che le potenze sviluppate dagli aerei a
reazione sono particolarmente rilevanti alle basse quote: di conseguenza,
nonostante la resistenza aerodinamica dovuta alla velocit` a elevata, `e dispo-
nibile un eccesso di potenza che permette di salire con elevati valori di V
z
,
senza eccessiva riduzione sia della velocit` a indicata sia di quella al suolo.
Le velocit` a che garantiscono le migliori prestazioni sono infatti pi` u eleva-
te rispetto a quelle corrispondenti dei velivoli ad elica e sono prossime alla
velocit` a massima operativa (V
MO
) al livello del mare, per poi diminuire al-
laumentare della quota.
A seconda delle prestazioni che si vogliono ottenere durante una salita vale
la seguente classicazione:
1. Salita Ripida: `e la salita alla velocit` a indicata V
x
; essa consente il
maggiore incremento di quota rispetto allo spazio percorso al suolo ed
`e la velocit` a alla quale corrisponde il massimo angolo di pendenza della
traiettoria .
8.4. CONFRONTO TRA VELIVOLI AD ELICA E A GETTO 103
2. Salita Rapida: `e la salita alla velocit` a indicata V
y
; essa diminuisce con
la quota e permette di raggiungere un determinato livello di quota nel
minimo tempo. E la velocit` a alla quale si ha il massimo valore della
velocit` a verticale V
z
.
3. Salita Economica: `e la salita alla velocit` a indicata (e successivamente a
numero di Mach) che minimizza il rapporto consumo/distanza; il volo
avviene ad una velocit` a maggiore rispetto alla V
y
, con conseguente
aumento del tempo di salita (e quindi del consumo), ma permette
comunque di ottenere dei beneci in termini di distanza percorsa.
4. Salita Bilanciata: `e la salita alla velocit` a indicata (e successivamente
a numero di Mach) che minimizza il rapporto tempo/distanza; il volo
avviene ad una velocit` a ancora superiore a quella di Salita Economica.
Anche in questo caso, pagando certo prezzo in termini di autonomia
chilometrica specica, `e possibile ottenere sensibili aumenti di velocit` a
e distanze percorse al suolo.
La salita con velivolo a getto presenta tuttavia anche degli aspetti svantag-
giosi, quali la transizione durante il decollo e la turbolenza. Il primo consiste
nella necessit` a di accelerare il velivolo dalla velocit` a di decollo (molto bassa)
no alla velocit` a, generalmente elevata per i discorsi n qui fatti, con cui si
aronta la salita. Questo fatto comporta un contenimento del rateo di salita
(o addirittura una rinuncia nel caso di piantata motore) a favore di una fase
di accelerazione esasperata. Tutto questo pu` o portare a dei problemi nel
sorvolo di eventuali ostacoli che, mentre per un velivolo ad elica (grazie alla
ridotta fase di accelerazione) risultano relativamente lontani rispetto alle-
stremit` a della pista, per un velivolo a getto possono invece apparire molto
pi` u vicini. La soluzione a questo problema consiste nel limitare il peso del
velivolo, garantendo cos` una minima pendenza della traiettoria, anche in
caso di avaria di uno dei motori.
Per quanto riguarda la turbolenza, le rache pi` u severe (quelle di intensit` a
superiore a 10 ft/sec) si incontrano frequentemente al disotto dei 5.000 ft.
Tali rache, a causa della elevata velocit` a di salita, introducono nei veli-
voli delle variazioni di fattore di carico tali da pregiudicare il comfort dei
passeggeri o in casi pi` u estremi lintegrit` a della struttura (le sollecitazioni in-
trodotte nel velivolo da una raca verticale sono proporzionali alla velocit` a
di volo e alla velocit` a della raca stessa).
104 CAPITOLO 8. IL VOLO SU TRAIETTORIE DI SALITA
8.5 Inuenza della congurazione
A parit` a di spinta e di peso, un velivolo si comporta durante la salita iniziale,
susseguente al decollo, in modo strettamente dipendente dalla congurazio-
ne. Esaminiamo, ad esempio, la dierenza tra due decolli eettuati con due
aerei aventi uguali caratteristiche aerodinamiche e propulsive, ma diverse
congurazioni ovvero angolazioni di ap. Dallequazione della meccanica del
volo in salita:
sin =
T D
mg
(8.8)
E facile osservare che a parit` a di peso e di spinta, la pendenza della traiet-
toria `e tanto pi` u elevata quanto maggiore `e il termine T D, ovvero quanto
minore `e la resistenza aerodinamica. Poiche ogni qual volta si applica una
deessione delle superci di ipersostentazione si ha un aumento della resi-
stenza totale, laereo che decolla con la minore deessione di ap dimostra
un maggiore gradiente di salita.
Quanto detto risulta evidente dallanalisi delle curve della spinte necessarie
e disponibili; per una data velocit` a, la distanza tra le due `e proporzionale
infatti al gradiente di salita ed un elevato setting di aps tende a ridurre tale
distanza riducendo cos` la possibilit` a di salite pi` u ripide.
Lutilizzo delle superci di ipersostentazione ha un eetto negativo anche
sulla velocit` a verticale V
z
; a parit` a di velocit` a indicata risulta infatti ridotta
a causa del minore eccesso di potenza disponibile.
Capitolo 9
Il volo su traiettorie di
discesa
Nel capitolo ?? `e stato evidenziato il fatto che, per una assegnata velocit` a,
ogni qual volta la potenza (o la spinta) disponibile fornita dal propulsore
risulta inferiore a quella necessaria al volo orizzontale il velivolo si immette
in una traiettoria di discesa, con una pendenza strettamente legata al difetto
di potenza (o di spinta). Escludendo la possibilit` a di equilibrare il velivolo
ad una velocit` a minore, lunico modo per compensare la mancanza di tra-
zione necessaria a vincere la resistenza aerodinamica `e quello di introdurre,
attraverso una pendenza della traiettoria negativa (e quindi di discesa), una
componente del peso parallela alla direzione del moto.
Poiche alcuni tra gli aspetti principali del volo planato sono stati gi` a aronta-
ti nel capitolo ??, in questo capitolo verranno approfondite alcune tematiche
relative alle prestazioni ed alle procedure operative dei velivoli.
105
106 CAPITOLO 9. IL VOLO SU TRAIETTORIE DI DISCESA
V
L
D
mg
T
g
Figura 9.1: Azioni sul velivolo in condizioni di discesa
9.1 Equazioni Caratteristiche
Il modello matematico per il volo in discesa `e formalmente identico a quello
per il volo in salita. Con riferimento alla gura ?? si ha:
T D mg sin = 0 (9.1)
L mg cos = 0 (9.2)
x V cos = 0 (9.3)
z +V sin = 0 (9.4)
Moltiplicando la prima equazione per V si ricava lequazione di equilibrio in
termini di potenza:
P
d
= P
n
0
+mg V z (9.5)
da cui la velocit` a verticale di discesa:
V
z
=
P
d
P
n
0
mg
(9.6)
Nel caso particolare di discesa in volo librato (in cui potenza disponibile `e
nulla), la velocit` a verticale di discesa `e data:
V
z
=
P
n
0
mg
(9.7)
E quindi, a conferma di quanto gi` a detto nel capitolo ??, la minima velocit` a
di discesa si ottiene allincidenza di minima potenza necessaria, mentre la
9.2. PRESTAZIONI IN DISCESA 107
velocit` a che consente la minima pendenza della traiettoria, ovvero il mas-
simo spazio percorso rispetto al suolo, corrisponde alla velocit` a ecienza
massima.
Le precedenti considerazioni sono valide sia per i velivoli a getto sia per il
velivoli ad elica. Nel caso in cui si abbia una trazione residua, la velocit` a
lungo la traiettoria corrispondente alla minima velocit` a di discesa `e legger-
mente superiore per i velivoli a getto.
E importante sottolineare inne che la velocit` a di discesa, contrariamente
alla velocit` a di salita, `e elevata ad alta quota e tende a diminuire mano a
mano che il velivolo scende. E chiaro quindi che `e possibile mantenere una
certa velocit` a di discesa, a velocit` a indicata costante, con una progressiva
riduzione del regime del motore.
9.2 Prestazioni in discesa
Il volo in discesa presenta un aspetto caratteristico che risulta di rilevante
importanza in tutti i velivoli commerciali il cui peso, a causa del consumo
di carburante, varia notevolmente durante la missione. Si supponga di vo-
ler realizzare una discesa ad una velocit` a assegnata, ed esempio 250 kt, ad
un regime del motore prossimo al minimo in modo da trascurare la spinta
rispetto alla resistenza ed ipotizzare un volo librato.
Dato che la velocit` a indicata da mantenere non varia col peso del velivolo ne
consegue che, a seconda del peso del velivolo allinizio della discesa, il coe-
ciente di portanza (ovvero langolo dincidenza) avr` a un valore dierente. In
particolare, lincidenza (e quindi la corrispondente ecienza aerodinamica)
sar` a minore per il velivolo pi` u leggero e, poiche nel volo librato la pendenza
della traiettoria `e proporzionale allincidenza, la discesa sar` a pi` u ripida.
Questo aspetto, a prima vista paradossale e poco intuitivo, `e fondamentale
per la determinazione del punto della missione in cui iniziare la discesa al ne
di raggiungere la quota desiderata con la velocit` a pressata. In particolare
`e necessario anticipare il punto di inizio discesa, tanto pi` u laereo `e pesante
e posticiparlo tanto pi` u `e leggero.
Un altro aspetto legato alla discesa dei velivoli commerciali riguarda la va-
riazione della pressione in cabina. Durante la discesa degli aerei pressurizzati
infatti la quota in cabina deve scendere no al livello dellaeroporto senza re-
care disturbo ai passeggeri. Per una velocit` a di discesa di pari a 300 ft/min,
dallistante di inizio della discesa allistante nale deve trascorrere un tempo
108 CAPITOLO 9. IL VOLO SU TRAIETTORIE DI DISCESA
(espresso in minuti) pari a:
t =
z(Cabina)
300
(9.8)
9.2.1 Considerazioni operative
Si riportano qui di seguito alcuni programmi di discesa e le relative caratte-
ristiche. Come nel caso dei programmi di salita, la scelta di un programma
di volo rispetto ad un altro `e strettamente legata al tipo di velivolo ed alle
caratteristiche della missione.
1. Discesa a bassa velocit` a indicata; il regime del motore `e stabilito in
base alle esigenze di pressurizzazione, e la congurazione del velivolo
`e pulita, senza dispositivi frenanti (spoilers, aerofreni). Dal punto di
vista puramente teorico rappresenta il miglior programma di discesa
in quanto minimizza il rapporto consumo/distanza e si realizza in con-
dizioni di ecienza massima.
Esso presenta tuttavia alcuni inconvenienti: a) richiede una certa pre-
cisione in fase di pianicazione: un eventuale errore porterebbe infatti
ad un ulteriore segmento in volo livellato a bassa quota, che come vi-
sto risulta sconveniente per velivoli a getto, b) il rapporto tra la quota
persa e la distanza percorsa al suolo `e elevato: in caso di attesa o di
deviazione trovarsi a bassa quota costituisce un problema, c) il tempo
di volo `e inoltre molto elevato.
2. Discesa a bassa velocit` a, ma utilizzando i sistemi frenanti disponibili
(aerofreni o spoilers). Tale discesa risulta migliore dal punto di vista
del tempo e quindi del costo, tuttavia presenta linconveniente di essere
incompatibile con le esigenze di pressurizzazione della cabina.
3. Discesa spezzata, realizzata in due tratti. Nel primo tratto il velivolo
ha una congurazione pulita: la velocit` a di discesa `e tale da assicura-
re la corretta pressurizzazione della cabina mentre velocit` a indicata `e
molto elevata. Questo consente perdite di quota non eccessivamente
rapide garantendo allo stesso un certo valore di velocit` a al suolo. Il
secondo tratto viene sempre eettuato ad alta velocit` a ma con un regi-
me motore molto prossimo al minimo in quanto la quota della cabina
`e divenuta compatibile con quella del velivolo. Questo tipo di discesa
9.3. INFLUENZA DELLA CONFIGURAZIONE 109
consente allaereo di mantenere no alle ultime fasi una quota relativa-
mente elevata in modo da poter eettuare in caso di necessit` a unattesa
o una deviazione. Laspetto negativo di questo programma sta nel fat-
to che volando a velocit` a elevata i carichi introdotti dalla turbolenza
atmosferica sono elevati (si ricorda che le rache diventano sempre pi` u
severe mano a mano che si scende con la quota).
9.3 Inuenza della congurazione
I dispositivi frenanti (aerofreni e spoilers) hanno una inuenza negativa sulla
polare del velivolo e di conseguenza sulle prestazioni. Essi infatti a causa
dellaumento di resistenza provocano un aumento della potenza necessaria
al volo livellato.
Una diretta conseguenza, a parit` a di altri fattori, `e quindi un aumento del-
la velocit` a di discesa. Limpiego di questi dispositivi presenta dunque un
duplice aspetto: a) a parit` a di velocit` a indicata, a causa della riduzione
di ecienza aerodinamica, la pendenza della traiettoria di discesa aumenta
oppure b) a parit` a di quota la velocit` a indicata viene ridotta a causa del-
laumento di potenza (o spinta) necessaria.
Anche la deessione dei dispositivi di ipersostentazione (aps) comporta un
aumento della velocit` a di discesa, a parit` a di velocit` a indicata. Inoltre la
velocit` a di ecienza massima con aps estesi `e minore rispetto a quella che
si ha in congurazione pulita. Questo rende il ramo della curva in cui si
manifesta linstabilit` a di velocit` a pi` u compresso, facilitando le operazioni
in fase di atterraggio.
Capitolo 10
La virata
Tutte le condizioni di volo n qui esaminate hanno in comune il fatto che
levoluzione del moto avviene nel piano di simmetria del velivolo, e lipo-
tesi di assenza di forze laterali `e stata introdotta nel modello matematico
attraverso lannullamento dellangolo di bank ( = 0). Rimuovendo questa
ipotesi `e possibile immettere il velivolo in traiettorie appartenenti al piano
orizzontale: la forza laterale proporzionale allangolo di bank provoca infatti
una accelerazione che tende a deviare la traiettoria del velivolo.
La principale condizione di volo che prevede il moto nel piano orizzontale `e
la manovra di virata stazionaria (o virata corretta): il velivolo percorre una
traiettoria circolare di raggio R assegnato, mantenendo costante il valore
della quota. Anche il modulo della velocit` a `e costante durante la manovra,
mentre la direzione `e sempre tangente traiettoria e giace sul piano di sim-
metria del velivolo.
Le superci di controllo coinvolte per la manovra sono gli alettoni. Attra-
verso la loro deessione si provoca infatti una dierenza di portanza tra le
due semiali: da questa asimmetria nasce un momento attorno allasse lon-
gitudinale del velivolo e quindi una velocit` a angolare. Una volta raggiunta
linclinazione desiderata gli alettoni vengono riportati nella posizione neutra.
La portanza risulta a questo punto inclinata rispetto alla direzione orizzon-
tale e la sua componente laterale, combinata vettorialmente con la spinta,
provoca una continua deviazione della traiettoria che da rettilinea diviene
appunto circolare. Anche il velivolo sia equilibrato, la componente laterale
della portanza deve essere bilanciata dalla forza centrifuga.
Luso del timone di direzione durante la manovra di virata `e necessario per
111
112 CAPITOLO 10. LA VIRATA
Figura 10.1: Azioni sul velivolo durante una virata stazionaria
contrastare un eetto secondario provocato dalla deessione degli alettoni.
Leetto principale degli alettoni `e quello di generare una asimmetria di
portanza sulle due semiali, ma appare chiaro tuttavia che, a lato di una dif-
ferenza di portanza introdotta da una dierenza di incidenza, compare una
dierenza di resistenza indotta responsabile dellintroduzione di un momen-
to imbardante.
10.1 Equazioni caratteristiche
Con riferimento alla gura ?? le equazioni di equilibrio della virata stazio-
naria sono ricavate come segue. Lungo la direzione parallela allorizzontale
locale, la componente laterale portanza viene equilibrata dalla forza centri-
fuga F
c
, la quale `e sempre diretta esternamente alla traiettoria percorsa dal
velivolo. Indicando con R il raggio di curvatura si ha:
L sin =
mV
2
R
(10.1)
Lungo la direzione verticale invece laltra componente della portanza deve
equilibrare il peso del velivolo:
L cos = mg (10.2)
10.1. EQUAZIONI CARATTERISTICHE 113
Le equzioni (??) e (??) rappresentano le equazioni di equilibrio della mec-
canica del volo durante una manovra di virata stazionaria.
Appare evidente dalle equazioni che a parit` a di incidenza, immettendo il
velivolo in virata a partire da una condizione di volo livellato, la velocit` a
selezionata per il volo livellato non risulta pi` u suciente a generare una
portanza tale da equilibrare il peso. Indicando con V
la velocit` a in volo li-
vellato, durante una virata caratterizzata da un angolo di bank , la velocit` a
per equilibrare il velivolo deve variare secondo la legge:
V = V
_
1
cos
(10.3)
Applicando la precedente equazione in condizioni C
L
M
`e possibile ricavare
la velocit` a di stallo durante la virata; indicando infatti con V
st
la velocit` a di
stallo in volo livellato, in virata si ha:
V
st
= V
st
_
1
cos
(10.4)
La velocit` a di stallo aumenta dunque con la radice quadrata del fattore di
carico della virata; noto langolo di bank `e immediato calcolare lincremento
della velocit` a di stallo relativo alla manovra. La tabella ?? riporta in fun-
zione di alcuni valori di il fattore di carico e lincremento della velocit` a di
stallo del velivolo.
Inne, poiche la velocit` a in virata risulta essere maggiore rispetto a quella
realizzabile in volo livellato alla stessa incidenza anche la potenza (o la spin-
ta) necessaria sar` a superiore. Il modello matematico della virata stazionaria
viene quindi completato dalla seguente equazione di equilibrio propulsivo:
T
= 1/2S(V
2
/ cos ) C
D
(10.5)
Possiamo quindi concludere che durante una virata le componenti orizzon-
tale e verticale della portanza uguagliano la forza centrifuga F
c
ed il peso
rispettivamente mentre la spinta, superiore a quella richiesta per il volo li-
vellato a pari incidenza, serve ancora a vincere la resistenza aerodinamica.
10.1.1 I parametri della virata
Dividendo lequazione (??) per la (??) si ottiene:
tan =
V
2
g R
(10.6)
114 CAPITOLO 10. LA VIRATA
Angolo di bank, Fattore di carico, n Incremento velocit` a, V
st
/V
st
15
1.035 1.017
30
1.154 1.074
45
1.414 1.189
60
2 1.414
Tabella 10.1: Variazione del fattore di carico e della velocit` a di stallo
da cui esplicitando il raggio di curvatura della traiettoria:
R =
V
2
tan g
(10.7)
La precedente equazione rappresenta il legame tra i parametri fondamentali
della virata: il raggio curvatura, la velocit` a e langolo di bank; ssando due
dei suddetti parametri il terzo `e univocamente determinato.
E utile introdurre le seguenti considerazioni:
1. A parit` a di velocit` a, il raggio di curvatura diminuisce allaumentare
dellangolo di bank. Per eettuare virate pi` u strette `e necessario
quindi inclinare maggiormente il velivolo.
2. A parit` a di raggio di curvatura, la velocit` a con la quale viene percorsa la
traiettoria aumenta allaumentare dellangolo di bank. Ci` o `e dovuto al
fatto che inclinando maggiormente il velivolo, la componente verticale
tende a diminuire e quindi per equilibrare lo stesso peso non rimane
che incrementare la velocit` a secondo la (??).
3. A parit` a di angolo di bank, il raggio di virata dipende dal quadrato
della velocit` a, che `e intesa come velocit` a vera rispetto allaria: a parit` a
di altre condizioni il raggio virata aumenta con la quota.
4. Nellequazione (??) non compare la massa del velivolo: due velivoli
aventi pesi anche molto diversi tra loro, ma inclinati dello stesso angolo
e dotati della stessa velocit` a, percorrono la medesima traiettoria.
10.1.2 Virata in condizioni di non-equilibrio
Quando la condizione di equilibrio verticale, espressa dallequazione (??) non
risulta essere soddisfatta, si possono avere i seguenti casi, [?]:
10.2. VIRATA STANDARD 115
1. L cos < mg: la portanza sviluppata risulta essere insuciente. Il
velivolo non `e sostenuto e perde quota durante la virata, la traiettoria
non `e pi` u circolare ma diviene una spirale.
2. L cos > mg: la portanza sviluppata `e eccessiva ed quindi il velivolo
tende a guadagnare quota.
Relativamente allequilibrio orizzontale, nei casi in cui lequazione (??) non
risulta essere soddisfatta si ha:
1. L sin < mV
2
/R: langolo di bank non `e suciente a generare una
componente della portanza tale da equilibrare la forza centrifuga. Il
velivolo derapa e questa situazione si presenta ogni volta che il pilota
cerca di eettuare una virata con un comando di alettoni contenuto
ed utilizzando il timone. Estremizzando tale manovra si arriva alla
cosiddetta virata piatta, = 0, che per` o essendo caratterizzata da
elevati valori del raggio di curvatura non risulta di interesse pratico.
2. L sin > mV
2
/R: la componente laterale della portanza `e superiore
alla forza centrifuga; il velivolo scivola dala stringendo la traietto-
ria che risulter` a essere caratterizzata da un valore minore del raggio
di curvatura. Per riportare lequilibrio il pilota deve ridurre langolo
di bank o aumentare la velocit` a, oppure una combinazione delle due
soluzioni
Si conclude osservando che il fattore di carico dipende esclusivamente dallan-
golo di bank: `e richiesta quindi una particolare attenzione allinclinazione del
velivolo durante le manovre, al ne di evitare carichi eccessivi che possono
danneggiare la struttura.
10.2 Virata standard
Per virata standard, si intende una virata stazionaria eettuata in modo di
percorrere unintera circonferenza in 2 minuti. Dalle equazioni di equilibrio `e
possibile determinare langolo di bank necessario alla virata standard. Sup-
poniamo di dover eettuare ad esempio una virata a livello del mare con
una velocit` a pari a 110 m/s. Dal legame tra velocit` a angolare e velocit` a
periferica si ricava il raggio:
R =
V
=
110 m/s 120 s
2
= 2100 m/s (10.8)
116 CAPITOLO 10. LA VIRATA
dalla relazione che lega i parametri della virata si ha:
tan =
V
2
g R
=
110 m
2
/s
2
9.81 m/s
2
2100 m
= 0.585 (10.9)
da cui langolo di bank 30
. E importante osservare che la velocit` a
angolare `e proporzionale alla tangente dellangolo di bank ed inversamente
proporzionale alla velocit` a. In altre parole, assegnato un angolo di bank,
la virata standard pu` o eettuarsi per un unico valore della velocit` a e, allo
stesso modo, ssata la velocit` a esiste un solo angolo di inclinazione che ne
consente lesecuzione.
Per determinare in modo approssimato (ma comunque sucientemente accu-
rato) langolo di bank necessario ad eettuare una virata standard al livello
del mare ad una assegnata velocit` a, si ricorre ad un metodo empirico che
consiste nel sommare il numero 7 al 10% della velocit` a espressa in nodi. La
variazione dellangolo di bank e del raggio di curvatura con la quota, a parit` a
di velocit` a indicata, si ottengono attraverso le seguenti espressioni:
tan = tan
SL
_
(10.10)
e
R = R
SL
_
(10.11)
dove con il susso SL si fa riferimento alla condizione a livello del mare.
Si sottolinea ancora lindipendenza dal peso del velivolo: a parit` a di velocit` a
indicata velivoli di peso dierente richiedono per una virata standard lo
stesso angolo di bank.
10.3 Potenza e spinta necessarie per la virata
E stato evidenziato nel corso del capitolo che per mantenere la quota co-
stante durante una virata `e necessario un incremento di portanza: esso pu` o
essere realizzato o attraverso un incremento di velocit` a oppure attraverso un
incremento dellangolo dincidenza.
Aumentando lincidenza si incrementa tuttavia anche la resistenza indotta e
pertanto, senza un intervento sul regime del motore, la velocit` a diminuisce;
si genera quindi una ulteriore diminuzione della portanza che va a sua volta
10.3. POTENZA E SPINTA NECESSARIE PER LA VIRATA 117
Angolo di bank, Incremento di potenza, %P
n
30
33
45
100
60
300
Tabella 10.2: Variazione della potenza necessaria con langolo di bank
contrastata tramite un ulteriore aumento dellangolo dincidenza. Si instau-
ra un meccanismo instabile che porta il velivolo allo stallo.
Per valori dellangolo di bank inferiori a 30
lincremento di potenza richie-
sto per lequilibrio `e tuttavia modesto: per questo tipo di manovra non c`e
un reale vantaggio nellaumentare il regime del motore al ne di contrastare
lincremento di resistenza aerodinamica. Anche la conseguente riduzione di
velocit` a risulta contenuta.
Per valori pi` u spinti dellangolo di bank, la portanza aggiuntiva richiesta per
mantenere la quota comporta un elevato aumento della resistenza indotta:
il pilota `e chiamato ad aumentare il regime del motore per evitare eccessive
perdite di velocit` a.
Laumento della potenza necessaria durante lesecuzione di una manovra di
virata `e lo stesso che si avrebbe in volo livellato incrementando il peso del
velivolo no a quel valore dato dal prodotto tra il peso eettivo ed il fattore
di carico della manovra. La tabella ?? riporta lincremento di potenza ne-
cessaria durante una virata per diversi valori dellangolo di bank. Poiche la
resistenza indotta assume i valori pi` u elevati alle basse velocit` a `e importante
evitare manovre caratterizzate da angoli di bank elevati nelle fasi immedia-
tamente successive al decollo o durante le fasi che precedono latterraggio.
E utile a questo punto andare a studiare le dierenze tra velivoli propulsi
ad elica e a getto in relazione allincremento della richiesta propulsiva in
condizioni di virata. Esprimendo, nellequazione della potenza necessaria, la
velocit` a in virata come frazione della velocit` a in volo livellato, V
, si ha:
P
n
=
1
2
S V
3
C
D
=
1
2
S n
nV
3
C
D
= P
n
n
n (10.12)
mentre per lequazione della spinta:
T
n
=
1
2
S V
2
C
D
=
1
2
S nV
2
C
D
= T
n
n (10.13)
118 CAPITOLO 10. LA VIRATA
V
V
A
B
C
D
E
F
T
n
T
d
T d
G
f
Figura 10.2: Variazione della spinta necessaria in funzione del fattore di
carico
Le precedenti equazioni mettono in evidenza il ruolo del fattore di carico
sulle richieste propulsive. Mentre per un velivolo propulso a getto la spinta
necessaria in virata aumenta linearmente con n, per il velivolo ad elica la
potenza necessaria cresce pi` u rapidamente.
La gura ?? riporta la curva T
n
= f(V ) per diversi valori del fattore di
carico, ovvero dellangolo di bank. Ad ogni punto (V
, T
d
) sulla curva del
volo livellato corrispondono, sulle analoghe curve del volo in virata con di-
versi valori di angolo di bank (e quindi di fattore di carico n), dei punti di
ascissa V
n ed ordinata nT
n
. Si dimostra cos` che la velocit` a, la spinta e
la potenza variano in virata col fattore di carico con la stessa con cui variano
in volo livellato rispetto al peso.
Nella precedente gura si osservano tre particolari condizioni di volo in
virata,[?]:
1. Virata ad incidenza costante: la velocit` a deve aumentare secondo
n
mentre la spinta e la potenza necessaria con n e n
n, rispettivamen-
te. I punti di lavoro D, E e C individuano tre manovre ad incidenza
costante per diversi angoli di bank. La manovra di virata ad inciden-
10.3. POTENZA E SPINTA NECESSARIE PER LA VIRATA 119
za costante ha il vantaggio di permettere al velivolo di mantenere un
margine di sicurezza costante rispetto alla condizione di stallo.
2. Virata a velocit` a costante; richiede un aumento di spinta o di potenza,
inferiori a quelli richiesti in una virata ad incidenza costante. I punti
di lavoro F, G e C individuano tre manovre a velocit` a costante per
diversi angoli di bank.
3. Virata a spinta costante; la velocit` a diminuisce in virata allaumentare
dellangolo di bank no alla velocit` a di E
M
per i velivoli a getto (velo-
cit` a di (E/
C
L
)
M
per i velivoli ad elica); tali velocit` a rappresentano
infatti il minimo valore al quale `e ancora possibile il volo orizzontale.
I punti di lavoro A, B e C individuano tre manovre a spinta costante
per diversi angoli di bank.
Il volo orizzontale non `e pi` u quindi possibile con velocit` a inferiori di quella
corrispondente al punto C ed il velivolo inizia in tal caso a scendere con
velocit` a appartenenti al lato instabile della curva.
Capitolo 11
Le prestazioni in decollo
Il decollo rappresenta la fase iniziale della missione. Essa consiste, attraverso
una accelerazione lungo la pista, nel portare il velivolo da una condizione di
quiete no ad una velocit` a tale da permettere il distacco dal suolo e, succes-
sivamente, attraverso una manovra, il superamento di un ostacolo posto ad
una altezza ssata dai regolamenti.
11.1 Lo spazio necessario al decollo
La distanza di decollo (take-o), denita come lo spazio necessario per por-
tare il velivolo da una condizione a terra caratterizzata da velocit` a nulla no
al raggiungimento di una quota h
0
(che i regolamenti pongono pari a 35
ft), pu` o essere calcolata suddividendo la manovra stessa in tre fasi distinte
e utilizzando per ciascuna di queste fasi un opportuno modello matematico.
La somma delle distanze corrispondenti a ciascuna delle tre fasi fornisce la
distanza necessaria al completamento della manovra, [?]. Con riferimento
alla gura ?? si ha:
1. Fase di rullaggio, individuata dal segmento AB. Durante questa fase
il velivolo accelera da velocit` a nulla no a raggiungere la velocit` a V
R
,
scelta per il decollo.
2. Fase di manovra, segmento BC. In questa fase il velivolo si distacca
dal suolo (lift-o). La fase termina con il velivolo, sostenuto comple-
tamente dalla portanza, che si immette nella traiettoria di salita. La
velocit` a si mantiene costante al valore V
R
.
121
122 CAPITOLO 11. LE PRESTAZIONI IN DECOLLO
A B C
D
x
r
x
m
x
h
h
0
g
Figura 11.1: Segmenti tipici della manovra di decollo
3. Fase di salita, segmento CD. Il velivolo sale a velocit` a costante V
R
con pendenza della traiettoria . La fase termina col superamento
dellostacolo posto alla quota h
0
.
I vincoli a cui `e soggetta la velocit` a di decollo V
R
verranno approfonditi nel
corso del capitolo.
Esaminiamo adesso in dettaglio ciascuna delle fasi sopra descritte.
11.1.1 La fase di rullaggio
Questa fase si evolve con il velivolo a terra e lequazione del moto lungo la
direzione della velocit` a `e data dalla seguente espressione:
m
V = T R (11.1)
Con R `e stata indicata la risultante delle azioni che si oppongono al moto
del velivolo; essa `e costituita da un termine di resistenza aerodinamica pi` u
un termine di attrito tra carrelli e pista:
R = R
a
+D = f
_
mg
1
2
SV
2
C
L
r
_
+
1
2
SV
2
C
D
r
(11.2)
con C
L
r
e C
D
r
si indicano i coecienti di portanza e resistenza durante il
rullaggio mentre con f il coeciente di attrito di rotolamento. Tenendo
conto dellequazione della polare del velivolo lespressione della resistenza
complessiva pu` o scriversi come:
R = fmg +
1
2
SV
2
_
C
D
0
+KC
2
L
r
fC
L
r
_
(11.3)
11.1. LO SPAZIO NECESSARIO AL DECOLLO 123
La fase di rullaggio pu` o essere ottimizzata attraverso il valore del coe-
ciente di portanza che rende minimo il termine di resistenza complessiva.
Analiticamente il problema si risolve annullando la seguente derivata:
d
d C
L
r
_
C
D
0
+KC
2
L
r
fC
L
r
_
= 2 KC
L
r
f = 0 (11.4)
da cui:
C
L
r
|
ott
=
f
2K
(11.5)
Lassetto migliore per il decollo quindi `e funzione delle caratteristiche geo-
metriche del velivolo (in particolare dellallungamento alare) e delle caratte-
ristiche della pista. La tabella ?? riporta per diverse situazioni della pista il
relativo coeciente di attrito al rotolamento. Ipotizzando per tutta la fase
Condizioni della pista f (senza freni) f (con freni)
Cemento 0.03 - 0.05 0.4 - 0.5
Cemento bagnato 0.05 0.3
Erba 0.1 0.2
Pista ghiacciata 0.01 0.07 - 0.1
Tabella 11.1: Valori dellattrito al rotolamento
di decollo un valore costante per la spinta erogata dal motore, lo spazio per
la fase di rullaggio pu` o essere calcolato come segue. Dallequazione (??) si
ha che:
dV
dt
=
T R
m
(11.6)
ma vale anche:
dV
dx
=
dV
dx
dx
dt
=
T R
m
1
V
(11.7)
Lo spazio x
r
per la fase di rullaggio `e dato dalla soluzione del seguente
integrale:
x
r
=
_
V
R
0
mV
T R
dV (11.8)
nel quale imponendo per il coeciente di portanza il valore f/2K si ottiene:
x
r
=
_
V
R
0
V
r
1
r
2
V
2
dV (11.9)
124 CAPITOLO 11. LE PRESTAZIONI IN DECOLLO
dove si `e posto:
r
1
=
1
m
(T f mg) (11.10)
e
r
2
=
S
2m
(C
D
0
f
2
2K
) (11.11)
Integrando si ottiene lespressione per lo spazio necessario ad accelerare il
velivolo no alla velocit` a V
R
:
x
r
=
1
2r
2
_
ln |r
1
| ln |r
1
r
2
V
2
R
|
_
(11.12)
11.1.2 La fase di manovra
La fase ha inizio nel punto B in cui il velivolo, ancora a terra, ha raggiunto
la velocit` a V
R
. Durante questa fase il pilota deve portare, modicando las-
setto, il coeciente di portanza al suo valore massimo, C
L
M
.
Questa operazione, a causa dellinerzia aerodinamica del velivolo, non av-
verr` a istantaneamente ma richieder` a un certo tempo t
m
(generalmente del-
lordine di qualche secondo). Lo spazio percorso, sotto lipotesi di velocit` a
costante e pari alla V
R
, `e dato da
x
m
= V
R
t
m
(11.13)
11.1.3 La fase di salita
La precedente fase di manovra ha termine quando il velivolo `e in grado di
sviluppare la massima portanza e staccarsi da terra. Indicando con h = z
la quota rispetto alla pista, la fase di salita inizia con il velivolo che `e soggetto
alla accelerazione verticale:
m
h = L mg (11.14)
e termina in corrispondenza del punto D con il superamento dellostacolo
alla quota h
0
.
Laccelerazione verticale
h assume il valore massimo nellistante del distacco
(lift-o) per poi diminuire mano a mano che il velivolo sviluppa una sua
velocit` a verticale
h; laccelerazione verticale si annulla quando la suddetta
velocit` a assume il suo valore di regime.
Al ne di semplicare il calcolo dello spazio di salita x
h
si introducono, sotto
11.1. LO SPAZIO NECESSARIO AL DECOLLO 125
lipotesi di piccoli valori dellangolo di rampa, ovvero del rapporto
h/V
R
, le
seguenti posizioni:
1. Laccelerazione verticale
h `e costante nel tratto di CD e assume un
valore leggermente inferiore a al valore di lift-o.
h =
L mg
m
(11.15)
dove = 0.9 0.95.
2. La componente orizzontale della velocit` a `e costante e pari a V
R
.
Integrando 2 volte la (??) si ottiene lespressione della quota in funzione del
tempo:
z =
L mg
2m
t
2
(11.16)
Esplicitando il tempo nella precedente relazione e ricordando che x
h
= V
R
t,
quando il velivolo ha raggiunto la quota h
0
si ha:
x
h
= V
R
2h
0
(L mg)/m
(11.17)
da cui ricordando che n = L/mg si ottiene:
x
h
= V
R
2h
0
g(n 1)
(11.18)
Un valore tipico del fattore di carico per questa fase pu` o essere ricavato te-
nendo conto che i regolamenti impongono per la velocit` a V
R
il valore minimo
pari a 1.2 V
st
e che al termine della fase di lift-o il valore del coeciente di
portanza risulta essere C
L
h
= 0.8 C
L
M
:
n =
L
mg
=
1/2 S (1.2 V
st
)
2
(0.8 C
L
M
)
1/2 S V
2
st
C
L
M
= 1.152 (11.19)
Lo spazio totale di decollo `e quindi dato dalla somma dei tre singoli contri-
buti:
x
to
= x
r
+x
m
+x
h
=
1
2r
2
_
ln |r
1
| ln |r
1
r
2
V
2
R
|
_
+V
R
_
2h
0
g(n 1)
+t
m
_
(11.20)
126 CAPITOLO 11. LE PRESTAZIONI IN DECOLLO
11.2 Le velocit`a del decollo
Nella denizione delle prestazioni di decollo di un velivolo commerciale, `e
necessario determinare tre valori caratteristici della velocit` a (V
1
, V
R
e V
2
)
che permettono al pilota di eettuare la manovra rimanendo entro dei mar-
gini di sicurezza prestabiliti.
I valori delle suddette velocit` a sono funzioni dei parametri di decollo e di altre
caratteristiche tipiche del velivolo (velocit` a di stallo e margini di manovra-
bilit` a in caso di avaria spinta). Esistono inoltre altre velocit` a caratteristiche
per il decollo le quali, sebbene meno evidenziate rispetto alle tre sopra de-
scritte, rivestono comunque particolare importanza.
Qui di seguito si riporta, lelenco delle velocit` a caratteristiche, partendo dai
valori minori no ai maggiori seguendo lordine pi` u diuso per i velivoli da
trasporto.
1. Velocit` a minima di controllo in aria, V
MCA
.
E denita come la minima velocit` a alla quale `e possibile mantenere il
volo rettilineo in condizioni di avaria di spinta e con un angolo di bank
non superiore a 5
. E ammessa la massima deessione del timone di
direzione ma lo sforzo applicato deve essere inferiore a 180 lbs.
Il valore della V
MCA
`e fortemente inuenzato, oltre che dalle caratte-
ristiche aerodinamiche e geometriche del velivolo, dalla temperatura e
dalla quota dellaeroporto e, nel caso di timone verticale con elevato
angolo di freccia, dal peso del velivolo. Un peso elevato infatti, a parit` a
di velocit` a, richiede un angolo di incidenza maggiore ed un aumento
dellincidenza, introduce un aumento ttizio dellangolo di freccia del
timone. Di consegeunza la componente della velocit` a normale al bordo
dattacco del timone, che serve a generare la forza necessaria a contra-
stare il momento imbardante dellavaria di spinta, tende a diminuisce.
La velocit` a V
MCA
cresce quindi allaumentare del peso del velivolo.
2. Velocit` a minima di controllo a terra, V
MCG
.
E denita come la velocit` a minima al suolo alla quale `e possibile man-
tenere, in condizioni di avaria di spinta, la direzione di pista con la
massima deessione dei comandi aerodinamici ma senza diminuire la
spinta erogata dai motori ancora operativi.
Anche la velocit` a V
MCG
`e funzione delle caratteristiche del velivolo e
dalla quota e temperatura dellaeroporto.
11.2. LE VELOCIT
`
A DEL DECOLLO 127
C
1
C
2
V
A
V
1
V
2
V
d
d
1
d
A
d
BFL
d
2
Figura 11.2: Metodo graco per calcolo della V
1
3. Velocit` a di decisione, V
1
.
E denita come la velocit` a critica di avaria motore. Non deve essere
inferiore alla V
MCG
e deve consentire, in caso di avaria di un motore,
sia linterruzione che la prosecuzione in sicurezza del decollo.
Per la determinazione della V
1
si fa riferimento al graco riportato in
gura ??. La curva c
1
rappresenta lo spazio necessario al decollo in
funzione della velocit` a alla quale si verica la piantata di un motore;
nel caso di piantata in corrispondenza della velocit` a V
A
il corrispon-
dente spazio di decollo d
A
`e tiene conto del fatto che no al valore
V
A
tutti i motori sono operativi. La distanza d
1
rappresenta lo spazio
necessario ad un decollo completamente eettuato con un motore in
avaria, mentre la distanza d
2
equivale ad un decollo senza motori in
avaria per velocit` a no a V
2
.
La curva c
2
rappresenta invece lo spazio necessario per accelerare il ve-
livolo no ad un dato valore di velocit` a e successivamente decelerarlo
no allarresto. Nel caso in cui lavaria si verichi in corrispondenza di
V
1
lo spazio necessario al completamento del decollo `e pari a quello ne-
128 CAPITOLO 11. LE PRESTAZIONI IN DECOLLO
cessario allarresto del velivolo. Lo spazio di decollo in corrispondenza
del valore di V
1
`e chiamato lunghezza bilanciata della pista, d
BFL
.
In conclusione, se lavaria si verica prima del raggiungimento della
V
1
il pilota arresta il velivolo in quanto la lunghezza di pista residua
consente la decelerazione in sicurezza. Se al contrario lavaria motore
avviene ad una velocit` a superiore alla V
1
, il pilota allora prosegue il
decollo secondo le modalit` a previste per lavaria di spinta, in quanto
la pista residua consente il completamento della manovra.
4. Velocit` a minima di distacco V
MU
.
La V
MU
(Minimum Unstick Speed) `e denita come la minima la mi-
nima velocit` a alla quale il velivolo pu` o staccarsi dal suolo e continua-
re il decollo. Generalmente il valore di tale velocit` a `e stabilito dal
costruttore ed circa 1.3 V
st
.
5. Velocit` a di rotazione, V
R
.
Rappresenta una delle velocit` a caratteristiche pi` u importanti. Il rag-
giungimento di tale velocit` a denisce listante in cui il pilota pu` o ini-
ziare la rotazione del velivolo, con una velocit` a angolare di circa 3
/ s,
al ne di staccarlo dal suolo.
Le norme regolamentari che regolano la denizione della velocit` a V
R
sono molto complesse. Qui di seguito sono riportati i principi guida
per la determinazione di tale velocit` a.
a) non deve essere inferiore a 1.05 V
MCA
. Infatti nel caso di una
avaria durante il decollo, un seppur piccolo margine rispetto alla
V
MCA
contribuisce a migliorare il controllo iniziale del velivolo.
b) non deve essere inferiore alla V
1
. Ipotizzando il contrario si do-
vrebbe ammettere la possibilit` a di interrompere il decollo con
il velivolo in fase di distacco da terra. Questa ovviamente non
`e una situazione accettabile in quanto comporterebbe pericolose
manovre per la rimessa a terra e inoltre un ridotto spazio per la
successiva frenata.
c) deve consentire il raggiungimento della velocit` a V
2
ad una quota
rispetto alla pista di non oltre 35 ft. La velocit` a V
2
come vedremo
pi` u avanti `e la minima velocit` a di sicurezza in volo e la V
R
deve
garantire al velivolo un margine di accelerazione tale da poter
raggiungere tale velocit` a rapidamente.
11.2. LE VELOCIT
`
A DEL DECOLLO 129
6. Velocit` a di sollevamento, V
LOF
.
E denita come la velocit` a alla quale il velivolo deve sollevarsi dal
suolo. Essa `e strettamente legata al valore della V
R
; in particolare
se la V
R
assume il massimo valore possibile, la relativa velocit` a di
sollevamento deve risultare pari almeno a 1.05 V
MU
con un motore in
avaria ed a 1.1 V
MU
con i tutti i motori operativi.
7. Velocit` a di sicurezza al decollo, V
2
.
E denita la velocit` a con la quale il velivolo deve sorvolare lostacolo
posto 35 ft di altezza sulla pista. I vincoli che limitano il valore sono
i seguenti:
a) Non deve essere inferiore a 1.2V
s
.
b) Non deve essere inferiore a 1.1V
MCG
.
c) La V
2
deve consentire di percorrere con un motore in avaria la pre-
scritta pendenza di traiettoria di salita mantenendo un pressato
margine dallo stallo.
Nella situazione in cui sia commercialmente conveniente, `e possibile
adottare un valore di V
2
superiore ai suddetti limiti purche si man-
tengano inalterati i rapporti con la V
R
. In particolare va rispettato
sempre lobbligo di raggiungere la V
2
entro 35 ft di altezza entro i li-
miti di pista disponibile.
Capitolo 12
Le prestazioni in atterraggio
Latterraggio costituisce la conclusione della missione di un velivolo e rappre-
senta una fase delicata in quanto, come per il decollo, le operazioni vengono
eettuate a valori della velocit` a prossimi alla velocit` a di stallo.
Le prestazioni durante latterraggio sono fortemente inuenzate dalle condi-
zioni atmosferiche e dalle caratteristiche del velivolo e del pilota.
Ai ni di uniformare tali prestazioni si prevedono, a livello regolamentare,
adeguati margini di sicurezza imponendo quindi che la fase di atterraggio
avvenga utilizzando opportune velocit` a e lunghezze di pista, ed in caso di
riattaccata, un prestabilito gradiente minimo.
Anche in questo caso verranno analizzati i parametri che inuenzano le pre-
stazioni del velivolo e che, alla luce delle precedenti considerazioni, introdu-
cono delle limitazioni al peso del velivolo in atterraggio.
12.1 Lo spazio necessario allatterraggio
La lunghezza di pista necessaria non pu` o coincidere con la pista eettiva-
mente disponibile sullaeroporto. In tal caso infatti verrebbero a mancare
tutti i margini di sicurezza in caso di sorvolo dellinizio pista a quote e velo-
cit` a superiori a quelle previste. In particolare i regolamenti stabiliscono che
la distanza datterraggio non sia superiore al 60% della lunghezza di pista
disponibile.
Come nel caso del decollo, anche lo studio dellatterraggio pu` o essere aron-
tato suddividendo lintera manovra in tre fasi diverse, a ciascuna delle quali
131
132 CAPITOLO 12. LE PRESTAZIONI IN ATTERRAGGIO
E
G
H I
x
d
x
d
d
2
d
1
g
g
x
m
x
r
h
0
R
R cosg
R(1-cos ) g
Figura 12.1: Segmenti tipici della manovra di atterraggio
corrisponde un determinato spazio necessario. La somma dei singoli contri-
buti fornisce lo spazio necessario per portare il velivolo da una altezza minima
h
0
= 50 ft no allarresto completo sulla pista. Le tre fasi dellatterraggio
sono:
1. Fase di discesa, segmento EG. Durante questa fase il velivolo dece-
lera dalla velocit` a di avvicinamento V
a
> 1.3 V
st
no alla V
st
che
corrisponde alla velocit` a di stallo con aps estesi e carrelli abbassati.
2. Fase di manovra, segmento GH. Il velivolo in questa fase passa dallas-
setto caratterizzato da incidenza prossima allo stallo ad quello appog-
giato sui carrelli. La velocit` a si mantiene costante al valore V
st
.
3. Fase di rullaggio segmento HI. Il velivolo decelera no ad arrestarsi,
dissipando lenergia cinetica attraverso i dispositivi frenanti (reverse di
spinta e/o freni).
Le tre fasi sono ora esaminate in dettaglio. La velocit` a di avvicinamento
viene mantenuta, per motivi di sicurezza, ad una valore pari circa a 1.3 V
st
.
Durante la prima fase della discesa il velivolo deve decelerare no al valore
V
st
per poi eettuare la richiamata. Prima della richiamata la pendenza
della traiettoria `e costante e pari al valore che assume in prossimit` a dello-
stacolo (punto E). La distanza per la fase di discesa, pu` o essere scritta come
12.1. LO SPAZIO NECESSARIO ALLATTERRAGGIO 133
somma dei seguenti contributi:
x
d
= x
d
+x
d
(12.1)
dove il termine x
d
rappresenta la distanza di discesa che si avrebbe senza
la manovra di richiamata prima di toccare terra, mentre x
d
rappresenta
lincremento di spazio orizzontale introdotto dalla manovra di richiamata.
Dallanalisi della gura ?? si ottiene:
x
d
=
h
0
tan
E
=
h
0
E
E
(12.2)
dove con E
E
si indica il valore dellecienza aerodinamica del velivolo in
corrispondenza del punto E. Per il contributo dovuto alla manovra di
richiamata, eettuata alla velocit` a V
st
, si ha:
x
d
= d
2
d
1
= R
_
sin
E
1 cos
E
tan
E
/2
_
(12.3)
e inne esplicitando R dalla (??) e imponendolo nellequazione precedente:
x
d
=
V
2
st
(n 1)
tan
E
/2 (12.4)
E opportuno precisare che la velocit` a di stallo con aps potrebbe esse-
re diversa rispetto alla corrispondente per il decollo, a causa della diversa
deessione delle superci di ipersostentazione.
12.1.1 La fase di manovra
Per il calcolo dello spazio necessario alla manovra si ipotizza un valore del
tempo necessario al cambiamento di assetto dellordine di qualche secondo
(t
m
= 1 3 s). Lo spazio percorso dal velivolo, sotto lipotesi di velocit` a
costante, in questo intervallo di tempo `e dato da:
x
m
= V
st
t
m
(12.5)
Nella realt` a la velocit` a durante la fase di manovra non `e costante in quanto le
ruote frenate introducono una certa decelerazione nel velivolo nel istante del
contatto. Tuttavia, per una valutazione di primo tentativo delle prestazioni,
`e pi` u che accettabile.
134 CAPITOLO 12. LE PRESTAZIONI IN ATTERRAGGIO
12.1.2 La fase di rullaggio
Durante questa ultima fase il velivolo viene decelerato, no a dissipare tutta
la sua energia cinetica, attraverso i dispositivi frenanti. Il calcolo dello spa-
zio di frenata pu` o essere eettuato con una procedura del tutto analoga a
quella vista nel paragrafo ??. Tuttavia, ipotizzando un moto uniformemente
decelerato, lo spazio necessario allarresto del velivolo `e dato da:
x
r
=
V
2
st
2 a
r
(12.6)
Valori tipici per la decelerazione a
r
sono dellordine di 2 m/s
2
.
Lo spazio totale di atterraggio `e quindi dato dalla somma dei tre singoli
contributi:
x
l
= x
d
+x
m
+x
r
=
_
h
0
E
E
+
V
2
st
(n 1)
tan
E
/2
_
+V
st
t
m
+
V
2
st
2 a
r
(12.7)
12.2 La riattaccata
Per motivi di sicurezza, a prescindere dalla lunghezza della pista disponibile,
il velivolo in fase di atterraggio deve essere sempre in grado di interrompere
lavvicinamento alla pista ed eseguire la manovra di riattaccata, percorrendo
traiettorie caratterizzate da determinati valori della pendenza.
Generalmente sono considerati due diversi requisiti da soddisfare: 1) il ve-
livolo in congurazione di atterraggio, con il carrello esteso e tutti i motori
funzionanti alla spinta di riattaccata, deve percorrere una traiettoria con
una pendenza pari a = 2
, e 2) il velivolo in congurazione di atterraggio,
con il carrello esteso ed un motore in avaria, deve percorrere una traiettoria
con una pendenza pari a = 1.2
. Come `e stato osservato per il secondo
segmento della fase di decollo, anche nel caso di riattaccata, laumento del
peso del velivolo diviene tanto pi` u critico quanto sono pi` u elevate sono la
temperatura e la quota dellaeroporto.
12.3 Leetto suolo
La vicinanza di un velivolo alla supercie della pista (o dellacqua) introdu-
ce forti variazioni del campo aerodinamico, a causa delle diverse traiettorie
12.3. LEFFETTO SUOLO 135
h/b 1
1
C
Di
(GE)
(0) C
Di
Figura 12.2: Variazione della resistanza indotta in condizioni di vicinanza al
suolo
che percorrono i vortici delle superci portanti. Una supercie solida infat-
ti rappresenta una sorta di condotto, modicando conseguentemente sia la
direzione della massa daria (a monte e a valle dellala) sia lintensit` a dei
vortici destremit` a.
Sebbene tutti gli elementi del velivolo (ala, piani di coda e fusoliera) siano
interessati dalle variazioni introdottte nel campo aerodinamico della vici-
nanza del suolo, gli eetti principali sono maggiormente evidenti sullala. In
prossimit` a del suolo, in condizioni di velocit` a indicata costante, la traiettorie
dei letti uidi immediatamente a monte ed a valle dei proli alari risulta-
no meno inclinate rispetto ad una condizione libera. Si riduce lintensit` a
dei vortici marginali e lala mostra un aumento della portanza (a parit` a di
incidenza) ed una diminuzione della resistenza indotta (e quindi di potenza
necessaria); le stesse variazioni cio`e che si riscontrano dopo una aumento
dellallungamento alare. La gura ?? riporta la variazione percentuale del
coeciente di resistenza indotta a parit` a di coeciente di portanza, in fun-
zione dellaltezza relativa del piano alare dal suolo.
Gli eetti della vicinanza del velivolo rispetto al terreno sono particolarmen-
136 CAPITOLO 12. LE PRESTAZIONI IN ATTERRAGGIO
te importanti in fase di atterraggio e possono dar luogo a volte a situazioni
potenzialmente pericolose. Avvicinandosi alla pista ad incidenza costante, a
causa dellaumento del coeciente di portanza e della diminuzione di poten-
za necessaria, il velivolo tende a galleggiare con conseguente aumento della
distanza di atterraggio.
Durante il decollo invece il velivolo si allontana dalla supercie: gli eetti
causati dalla progressiva uscita dalleetto suolo sono contrari rispetto a
quelli visti per latterraggio, e possono essere riassunti come segue:
1. A parit` a di velocit` a indicata, `e richiesto un maggior angolo di incidenza
per mantenere la condizione di volo.
2. A causa dellaumento di resistenza indotta la potenza necessaria au-
menta.
3. La stabilit` a statica longitudinale diminuisce in quanto aumenta il mo-
mento a cabrare.
Bibliograa
[1] J. L. Boier, The Dynamics of Flight: The Equations, Wiley, 1998.
[2] G. Mengali, Elementi di Dinamica del Volo con Matlab, Edizioni
ETS, Pisa 2001.
[3] C. Casarosa, Meccanica del Volo, Ed. Plus, Pisa 2004.
[4] B. W. McCormick, Aerodynamics, Aeronautics, and Flight
Mechanics, Wiley, 1995.
[5] M. Asselin, An Introduction to Aircraft Performance, AIAA
Education Series, 1997.
[6] M. Venuti, Aerodinamica Oggi, Editrice Totem, Roma.
[7] G. Lucarelli, Meccanica del Volo, IBN Editore, Roma.
[8] A. Lausetti e F. Filippi, Elementi di Meccanica del Volo, Levrotto
& Bella, Torino.
137
S-ar putea să vă placă și
- PROPULSIONE AEROSPAZIALE Lez. 1Document56 paginiPROPULSIONE AEROSPAZIALE Lez. 1Adriano IsoldiÎncă nu există evaluări
- Esercizi di fisica per licei: fluidodinamica e termodinamicaDe la EverandEsercizi di fisica per licei: fluidodinamica e termodinamicaEvaluare: 5 din 5 stele5/5 (1)
- Appunti Di Costruzioni AeronauticheDocument355 paginiAppunti Di Costruzioni AeronauticheingegnereIrrazionale100% (2)
- Meccanica Dei Fluidi - Lezioni Di FluidodinamicaDocument286 paginiMeccanica Dei Fluidi - Lezioni Di FluidodinamicaMauro MenchiniÎncă nu există evaluări
- MDV3 2Document526 paginiMDV3 2Marcello ScarnecchiaÎncă nu există evaluări
- Anteprima Meccanica Del VoloDocument20 paginiAnteprima Meccanica Del VoloAndrea QuinciÎncă nu există evaluări
- Aerodinamica - Appunti Di Costruzioni Aeronautiche PDFDocument61 paginiAerodinamica - Appunti Di Costruzioni Aeronautiche PDFAntonio SgròÎncă nu există evaluări
- Esercizi4 CuscinettiDocument3 paginiEsercizi4 CuscinettiHernan MarianiÎncă nu există evaluări
- Impianti Motore Aereo PDFDocument20 paginiImpianti Motore Aereo PDFNgul ThometÎncă nu există evaluări
- CuscinettiDocument19 paginiCuscinettimgualdiÎncă nu există evaluări
- Meccanica+Del+Volo+ +Parte+1+Di+2+ +v3.57Document256 paginiMeccanica+Del+Volo+ +Parte+1+Di+2+ +v3.57anddev100% (1)
- Manuale - 5-Valutazione Di Edifici Esistenti in C.A.Document238 paginiManuale - 5-Valutazione Di Edifici Esistenti in C.A.Emanuele MastrangeloÎncă nu există evaluări
- AerodinamicaDocument61 paginiAerodinamicaAntonio PalombaÎncă nu există evaluări
- Trasformata Di Laplace e Trasformata Z FermoDocument19 paginiTrasformata Di Laplace e Trasformata Z FermoromoluswÎncă nu există evaluări
- Trasmissione e Regolazione Del Moto RotatorioDocument43 paginiTrasmissione e Regolazione Del Moto Rotatoriodpiperis1118100% (1)
- Meccanica VoloDocument123 paginiMeccanica VoloMarialaura MarcucciÎncă nu există evaluări
- Esempio Esercizio Completo Velivolo A GettoDocument12 paginiEsempio Esercizio Completo Velivolo A GettoBrian AdkinsÎncă nu există evaluări
- Strutture Delle FusoliereDocument20 paginiStrutture Delle FusolierestaedtlerpÎncă nu există evaluări
- ECM Appunti Sulle Ruote DentateDocument34 paginiECM Appunti Sulle Ruote DentateFrank WhittleÎncă nu există evaluări
- Elementi Di Meccanica PDFDocument55 paginiElementi Di Meccanica PDFMatteoÎncă nu există evaluări
- ISTITUZIONI-Di Ing. AerospazialeDocument30 paginiISTITUZIONI-Di Ing. Aerospazialefenix_realeÎncă nu există evaluări
- Dispense Di Marco Di Fisica TecnicaDocument560 paginiDispense Di Marco Di Fisica TecnicaCristian Grigore100% (1)
- Aerodinamica Del Velivolo (Cap.5)Document16 paginiAerodinamica Del Velivolo (Cap.5)jonathan.gelli5153100% (1)
- Fondamenti Di AutomaticaDocument39 paginiFondamenti Di Automaticamona_mi8202Încă nu există evaluări
- Motori A Combustione InternaDocument20 paginiMotori A Combustione Internamatealoredana8015Încă nu există evaluări
- Dadone - Macchine IdraulicheDocument91 paginiDadone - Macchine IdraulicheMartina0% (1)
- Cicli CombinatiDocument30 paginiCicli CombinatiNiccolò Giannotti100% (3)
- DSV-DQV Quaderno 1Document37 paginiDSV-DQV Quaderno 1don-donnolaÎncă nu există evaluări
- Eserciziario Piscaglia-OnoratiDocument35 paginiEserciziario Piscaglia-Onoratikirokiro92Încă nu există evaluări
- Meccanica Razionale EserciziDocument248 paginiMeccanica Razionale EserciziPepÎncă nu există evaluări
- Calcolo Volo LivellatoDocument29 paginiCalcolo Volo LivellatoAnonimoÎncă nu există evaluări
- Teoria Ed Esercizi Fondamenti Di MacchineDocument39 paginiTeoria Ed Esercizi Fondamenti Di MacchinePastoreÎncă nu există evaluări
- AerodinamicaDocument376 paginiAerodinamicaAlessandro Jommi100% (1)
- Domande Di Fisica TecnicaDocument4 paginiDomande Di Fisica TecnicaFlavia BarigelliÎncă nu există evaluări
- Motor I Per Aero Mobil IDocument56 paginiMotor I Per Aero Mobil IAgostino De GiuseppeÎncă nu există evaluări
- Elementi Di Aerodinamica by Mauro DaridaDocument219 paginiElementi Di Aerodinamica by Mauro DaridaCiccozzi58100% (1)
- Appunti Del CorsoDocument145 paginiAppunti Del Corsoleodilea1Încă nu există evaluări
- (Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniDocument112 pagini(Meccanica Applicata Alle Macchine) Meccanica Delle VibrazioniFedericoCÎncă nu există evaluări
- Spinta Intro PDFDocument14 paginiSpinta Intro PDFAlessandro Soli100% (1)
- 01-Meccanica Del Volo SpazialeDocument11 pagini01-Meccanica Del Volo Spazialemarcobianchi198000Încă nu există evaluări
- Meccanica Del Volo Spaziale - Parte1Document68 paginiMeccanica Del Volo Spaziale - Parte1Giancarlo PaolettiÎncă nu există evaluări
- Appunti Di Strutture PDFDocument182 paginiAppunti Di Strutture PDFNgul ThometÎncă nu există evaluări
- Aerodinamica Degli Aeromotori - Parte1Document48 paginiAerodinamica Degli Aeromotori - Parte1Federico BorrelliÎncă nu există evaluări
- Domande Di Sistemi EnergeticiDocument17 paginiDomande Di Sistemi EnergeticiucimolfettaÎncă nu există evaluări
- Macchine A FluidoDocument47 paginiMacchine A FluidoLeo LonardelliÎncă nu există evaluări
- Turbine AssialiDocument44 paginiTurbine Assialiannalisa.d.orazio5738Încă nu există evaluări
- Macchine 05 PDFDocument32 paginiMacchine 05 PDFbrufraÎncă nu există evaluări
- Esercizi Motori A Combustione Interna 1Document13 paginiEsercizi Motori A Combustione Interna 1Antonio Macrì100% (1)
- Aeroplano e Le Sue PartiDocument22 paginiAeroplano e Le Sue Partiproxymo1Încă nu există evaluări
- Introduzione A MatlabDocument32 paginiIntroduzione A Matlabgiordanobi859641Încă nu există evaluări
- Esercizio Aerotecnica 1Document1 paginăEsercizio Aerotecnica 1proxymo1Încă nu există evaluări
- Esercizio Sul Motore EndotermicoDocument6 paginiEsercizio Sul Motore Endotermicodpiperis1118Încă nu există evaluări
- Capitolo 9-Ciclo Frigor PDFDocument15 paginiCapitolo 9-Ciclo Frigor PDFLorenzo RiscicaÎncă nu există evaluări
- Soluzione Es 3Document21 paginiSoluzione Es 3LeonardoMadeira11Încă nu există evaluări
- 2017 - COMPORTAMENTO MECCANICO DI MATERIALI PER L'aerospazio PDFDocument2 pagini2017 - COMPORTAMENTO MECCANICO DI MATERIALI PER L'aerospazio PDFLeo LonardelliÎncă nu există evaluări
- Dispensa 1Document16 paginiDispensa 1Diogene Istocasto100% (1)
- Matematica vettoriale, matriciale e tensorialeDe la EverandMatematica vettoriale, matriciale e tensorialeEvaluare: 5 din 5 stele5/5 (1)
- Principi Di PneumaticaDocument12 paginiPrincipi Di PneumaticaAlessandro PatanèÎncă nu există evaluări
- Ferella Free f24 Mel MetDocument7 paginiFerella Free f24 Mel MetD RashÎncă nu există evaluări
- Reti e Dintorni 20Document54 paginiReti e Dintorni 20Roberto GaetaÎncă nu există evaluări
- Manuale Tecnix LT100-500Document2 paginiManuale Tecnix LT100-500Alessandro ChircoÎncă nu există evaluări
- Abbott Sapphire Manuale Uso AddendumDocument1.229 paginiAbbott Sapphire Manuale Uso Addenduminfo_710713766Încă nu există evaluări