S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Variable Speed Drives: Smart Ideas For Your BusinessDocument2 paginiVariable Speed Drives: Smart Ideas For Your BusinessSamiYousifÎncă nu există evaluări
- Kinetic TheoryDocument25 paginiKinetic TheorySultan ParvezÎncă nu există evaluări
- Gas MedisDocument12 paginiGas MedistrisaktiyÎncă nu există evaluări
- Lateral, Pipe Lateral, Steel Pipe Lateral, 45 Degree LateralDocument2 paginiLateral, Pipe Lateral, Steel Pipe Lateral, 45 Degree Lateralณัฐพล ศักดิ์นภาพรเลิศÎncă nu există evaluări
- Steel, Sheet, Carbon, Structural, and High-Strength, Low-Alloy, Hot-Rolled and Cold-Rolled, General Requirements ForDocument31 paginiSteel, Sheet, Carbon, Structural, and High-Strength, Low-Alloy, Hot-Rolled and Cold-Rolled, General Requirements Foralucard375Încă nu există evaluări
- bs1452 Grade 250Document2 paginibs1452 Grade 250Syed Shoaib RazaÎncă nu există evaluări
- TimeSheet Calculator TrumpExcelRevised 2017 v1Document50 paginiTimeSheet Calculator TrumpExcelRevised 2017 v1RAJÎncă nu există evaluări
- Welding Defects:: Welding Defects Types, Diagram, Causes and Remedies, PDF. HereDocument6 paginiWelding Defects:: Welding Defects Types, Diagram, Causes and Remedies, PDF. HereWilberZangaÎncă nu există evaluări
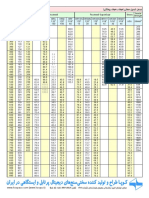
- Hardness Conversion Table: Tensile StrengthDocument1 paginăHardness Conversion Table: Tensile StrengthMehdy HosseiniÎncă nu există evaluări
- Module 5 DC MachinesDocument94 paginiModule 5 DC MachinesABC XYZÎncă nu există evaluări
- Cri:Iftzmiin: S - Ea/ SDocument52 paginiCri:Iftzmiin: S - Ea/ SElliott KastnerÎncă nu există evaluări
- Cambering BeamsDocument7 paginiCambering BeamsskidbarÎncă nu există evaluări
- PSF 250 PSF 510wDocument24 paginiPSF 250 PSF 510wthindmanmohanÎncă nu există evaluări
- Vectors Live Class 3 NotesDocument40 paginiVectors Live Class 3 NotesKushagra TiwariÎncă nu există evaluări
- Drying: CHE133 Heat and Mass Transfer ApplicationsDocument22 paginiDrying: CHE133 Heat and Mass Transfer ApplicationsRA MemijeÎncă nu există evaluări
- 1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Document18 pagini1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Elías Bravo CortésÎncă nu există evaluări
- Room Checksums by ArshadDocument4 paginiRoom Checksums by Arshadmeesam1Încă nu există evaluări
- STPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsDocument9 paginiSTPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsSouseiseki ChromeÎncă nu există evaluări
- Subject NotesDocument33 paginiSubject NotesI Am DeveshÎncă nu există evaluări
- Further Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeDocument6 paginiFurther Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeGavin Man20% (5)
- Calculation of Counterbalancing Force by Opposing Impellers Pressure 3rd Suc 3rd Dich 4th SucDocument5 paginiCalculation of Counterbalancing Force by Opposing Impellers Pressure 3rd Suc 3rd Dich 4th SucTusar KoleÎncă nu există evaluări
- Genset Installation and SopDocument3 paginiGenset Installation and Soptafi100% (1)
- Bobcat 730SH Sideshift Backhoes Service Repair Manual PDFDocument17 paginiBobcat 730SH Sideshift Backhoes Service Repair Manual PDFfujsjejfksekmem100% (1)
- Mechanical Properties of Solids - NotesDocument15 paginiMechanical Properties of Solids - NotesNyra HillsÎncă nu există evaluări
- 8.3 Theory of FlightDocument14 pagini8.3 Theory of Flightame_ravisinghÎncă nu există evaluări
- Stresses in Thin, Thick, Spherical PVsDocument22 paginiStresses in Thin, Thick, Spherical PVsSuresh SjÎncă nu există evaluări
- Dramix Setting The Standard SDocument8 paginiDramix Setting The Standard SwilmanesÎncă nu există evaluări
- Nzcs tr32Document145 paginiNzcs tr32Jianhua WuÎncă nu există evaluări
- Content 876957166474Document20 paginiContent 876957166474longtrandang5867100% (3)
- COLUMNPLAN2 RDocument35 paginiCOLUMNPLAN2 RAnonymous nwByj9LÎncă nu există evaluări