S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Engineering Department ProcedureDocument29 paginiEngineering Department ProcedureOmar Ahmed Elkhalil100% (1)
- Advanced Techniques in Power System Protective Relaying PDFDocument332 paginiAdvanced Techniques in Power System Protective Relaying PDFshashikant yadavÎncă nu există evaluări
- Acidizing TreatmentsDocument93 paginiAcidizing TreatmentsPeña Lucia100% (2)
- Carpentry: Exploratory CourseDocument25 paginiCarpentry: Exploratory CourseJohn Nelson Picones100% (3)
- 3500 91 Egd Communication Gateway Module Datasheet 0Document6 pagini3500 91 Egd Communication Gateway Module Datasheet 0dikastaloneÎncă nu există evaluări
- AE Yanmar 6GL UTDocument151 paginiAE Yanmar 6GL UTMehdi Es-SafiÎncă nu există evaluări
- Manual Técnico Sony HDC-DX70Document72 paginiManual Técnico Sony HDC-DX70Cristian MoraisÎncă nu există evaluări
- Smart Obj. Kiss and SwotDocument5 paginiSmart Obj. Kiss and SwotjtopuÎncă nu există evaluări
- Java SampleExamQuestionsDocument18 paginiJava SampleExamQuestionshmasryÎncă nu există evaluări
- Punjab Bye Laws For Commercial BuildingsDocument11 paginiPunjab Bye Laws For Commercial BuildingsAshween ManchandaÎncă nu există evaluări
- Metalco Valve TianjinDocument20 paginiMetalco Valve TianjinsathishÎncă nu există evaluări
- SensoNODE Catalog 3864 Feb 2015Document28 paginiSensoNODE Catalog 3864 Feb 2015btsgr parkerÎncă nu există evaluări
- Lab Gas FlowmeterDocument7 paginiLab Gas Flowmeterazym94Încă nu există evaluări
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenDocument34 paginiPresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliÎncă nu există evaluări
- Debug 1214Document3 paginiDebug 1214Anonymous B4WiRjÎncă nu există evaluări
- Customizing The ADFS Sign-In PagesDocument4 paginiCustomizing The ADFS Sign-In Pagesmicu0% (1)
- Technical LetteringDocument12 paginiTechnical LetteringMaverick Timbol50% (2)
- Unit 01 AssignmentDocument12 paginiUnit 01 Assignmentvipul unagarÎncă nu există evaluări
- UntitledDocument34 paginiUntitledRayudu VVSÎncă nu există evaluări
- MyNotes ConcreteDocument18 paginiMyNotes ConcreteKarl Si AkoÎncă nu există evaluări
- Parts Catalog: Paper Feed Unit Type 3800C (G568)Document23 paginiParts Catalog: Paper Feed Unit Type 3800C (G568)poldisagtÎncă nu există evaluări
- Kalzip - Vapour Layer FR 0822 PDFDocument2 paginiKalzip - Vapour Layer FR 0822 PDFBerat CakmakliÎncă nu există evaluări
- Project Steel - Final ReportDocument42 paginiProject Steel - Final Reportashikur rahmanÎncă nu există evaluări
- Scarifier 9 Piecies Tooth TypeDocument2 paginiScarifier 9 Piecies Tooth Typeangga setyawanÎncă nu există evaluări
- EC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFDocument102 paginiEC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFSivaramakrishnan Kanagaraj0% (1)
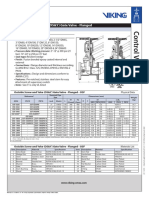
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 paginiOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoÎncă nu există evaluări
- X2 / 275 Vac: B 81 191 EMI Suppression CapacitorsDocument4 paginiX2 / 275 Vac: B 81 191 EMI Suppression CapacitorsMeg YorkÎncă nu există evaluări
- 545 ELP-ES-2011 - Catálogo de DisipadoresDocument24 pagini545 ELP-ES-2011 - Catálogo de DisipadoresrichkidÎncă nu există evaluări
- People Soft Bundle Release Note 9 Bundle9Document29 paginiPeople Soft Bundle Release Note 9 Bundle9rajiv_xguysÎncă nu există evaluări
- 592-A2GA DesbloqueadoDocument27 pagini592-A2GA DesbloqueadoVicktor GranadosÎncă nu există evaluări