International Journal of Engineering Research and Development
e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com
Volume 6, Issue 5 (March 2013), PP. 01-05
1
Dynamics in a Discrete Prey-Predator System
M.ReniSagayaRaj
1
, A.George Maria Selvam
2
, M.Meganathan
3
1, 2, 3
Sacred Heart College,Tirupattur - 635 601, S.India.
Abstract:- The stability analysis around equilibrium of a discrete-time predator prey system is considered
in this paper. We obtain local stability conditions of the system near equilibrium points. The phase
portraits are obtained for different sets of parameter values. Also limit cycles and bifurcation diagrams
are provided for selective range of growth parameter. It is observed that prey and predator populations
exhibit chaotic dynamics. Numerical simulations are performed and they exhibit rich dynamics of the
discrete model. 2010 Mathematics Subject Classification. 39A30, 92D25
Keywords and phrases:- Difference equations, predator prey system, fixed points, stability.
I. INTRODUCTION
Dynamics of interacting biological species has been studied in the past decades. The first models were put
forward independently by Alfred Lotka (an American biophysicist, 1925) and Vito Volterra (an Italian
Mathematician, 1926). Volterra formulated the model to explain oscillations in fish populations in Mediterranean.
The model is based on the following assumptions:
(a) Prey population grow in an unlimited way when predator is absent
(b) Predators depend on the presence of prey to survive
(c) The rate of predation depends up on the likelihood that a predator encounters a prey
(d) The growth rate of the predator population is proportional to rate of predation.
The Lotka-Volterra model is the simplest model of predator-prey interactions, expressed by the following equations
[2, 4].
= +
where x, yare the prey and predator population densities and a, b, c,d are positive constants.
II. MODEL DESCRIPTION AND EQUILIBRIUM POINTS
The discrete time models described by difference equations are more appropriate when the populations
have non overlapping generations. Discrete models can also provide efficient computational models of continuous
models for numerical simulations. The maps defined by simple difference equations can lead to rich complicated
dynamics [1,3,5,7]. The paper [1] discusses the local stability of fixed points, bifurcation, chaotic behavior,
Lyapunov exponents and fractal dimensions of the strange attractor associated with (1). This paper considers the
following system of deference equations which describes interactions between two species and presents the various
nature of fixed points and numerical simulations showing certain dynamical behavior.
( 1) ( )[1 ( )] ( ) ( )
( 1) ( ) ( ) ( )
x n rx n x n ax n y n
y n cy n bx n y n
+ =
+ = +
(1)
where r,a,b,c>0 The system (1) has the equilibrium points E
0
=(0,0),
1
1
, 0
r
E
r
| |
=
|
\ .
and
( )
2
1
1 1
,
r b c
c
E
b ab a
| |
+
=
|
\ .
. The trivial equilibrium point E
0
corresponds to extinction of prey and predator
species, E
1
corresponds to presence of prey and absence of predator and E
2
corresponds to coexistence of both
species. The equilibrium point E
2
is an interior positive equilibrium point provided
( ) 1
b
r
b c
>
+
.
International Journal of Engineering Research and Development
e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com
Volume 6, Issue 5 (March 2013), PP. 01-05
2
III. EIGEN VALUES AND STABILITY
Nonlinear systems are much harder to analyze than linear systems since they rarely possess analytical
solutions. One of the most useful and important technique for analyzing nonlinear systems qualitatively is the
analysis of the behavior of the solutions near equilibrium points using linearization. The local stability analysis of
the model can be carried out by computing the Jacobian corresponding to each equilibrium point. The Jacobian
matrix J for the system (1) is
The Jacobian at E
0
is of the form
( )
0
0
0
r
J E
c
| |
=
|
\ .
The eigen values are
1
r = and
2
c = . Stability is ensured if
1,2
1 < which implies r < 1 and c < 1.The
Jacobian matrix for E
1
is
( )
1
1
2
1
0
r
r a
r
J E
r
b c
r
| | | |
| |
\ .
|
=
|
| |
|
|
\ . \ .
The eigen values are
1
2 r = and
2
1 r
b c
r
| |
=
|
\ .
.The interior equilibrium point E
2
has the Jacobian
( )
( )
( )
2
1
1
1
1
1
r c
c
a
b b
J E
r b c b
a
| | +
+ | |
|
|
\ .
|
=
|
|
\ .
Computation yields
( ) 1
2
r c
Tr
b
+
= and
( ) ( ) 1 2 c r b c
Det c
b
+
= .
IV. CLASSIFICATION OF EQUILIBRIUM POINTS
The following lemma [8] is useful in the study of the nature of fixed points.
Lemma1.Let
2
( ) p B C = + and
1
,
2
be the roots of ( ) 0 p = . Suppose that
(1) 0 p >
Then we have
(i)
1
1 < and
2
1 < if and only if ( 1) 0 p > and C<1.
(ii)
1
1 < and
2
1 > (or
1
1 > and
2
1 < ) if and only if ( 1) 0 p < .
(iii)
1
1 > and
2
1 > if and only if ( 1) 0 p > and C>1.
(iv)
1
1 = and
2
1 = if and only if ( 1) 0 p = and 0, 2 B= .
(v)
1
and
2
are complex and
1 2
= if and only if B
2
-4C < 0 and C=1.
The characteristic roots
1
and
2
of ( ) 0 p = are called eigen values of the fixed point
( )
, x y
- -
. The fixed point
( )
, x y
- -
is a sink if
1,2
1 < . Hence the sink is locally asymptotically stable. The fixed point
( )
, x y
- -
is a source if
1,2
1 > . The source is locally unstable. The fixed point
( )
, x y
- -
is a saddle if
1
1 > and
2
1 < (or
1
1 < and
2
1 > ). Finally
( )
, x y
- -
is called non hyperbolic if either
1 2
1 1 or = = . For the system (1), we have the
following results.
2
( , )
r rx ay ax
J x y
by bx c
| |
=
|
\ .
International Journal of Engineering Research and Development
e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com
Volume 6, Issue 5 (March 2013), PP. 01-05
3
Proposition 2. The fixed point E
0
is a
- Sink if 1 r < and 1 c< . Source if 1 r > and 1 c> .
- Saddle if 1 r > and 1 c< . Non hyperbolic if 1 r = and 1 c= .
Proposition 3. The fixed point E
1
is a
- Sink if 1 3 r < < and
( ) 1
1
r c
b
r
+
<
. Source if 3 r > and
( ) 1
1
r c
b
r
+
>
.
- Saddle if 1 3 r < < and
( ) 1
1
r c
b
r
+
>
.
Proposition 4. The fixed point E
2
is a
- Sink if
( )
( ) ( ) ( ) ( )
3
2 1 3
b c
b
r
b c c b c
< <
+ + +
.
- Source if
( )
( ) ( ) ( )
3
1 3
b c
r
c b c
>
+ +
and
( ) 2
b
r
b c
>
+
. Saddle if
( )
( ) ( ) ( )
3
1 3
b c
r
c b c
<
+ +
.
V. NUMERICAL SIMULATIONS
In this section, we provide the numerical simulations to illustrate some results of the previous sections.
Mainly, we present the time plots of the solutions x and y with phase plane diagrams (around the positive
equilibrium point) for the predator-prey systems. Dynamic natures of the system (1) about the equilibrium points
with different sets of parameter values are presented. Existence of limit cycles for selective set of parameters is
established through phase planes in Figures-3, 4. Also the bifurcation diagram, Figure-5, indicates the existence of
chaos in both prey and predator populations.
Example1.For the values r = 2.89, a = 0.099, b = 3.075, c = 1.09, we obtain E
1
=(0.65, 0) which is an axial fixed
point. Eigen values are
1
= -0.89 and
2
= 0.9209 so that
1,2
1 < . Hence the fixed point is stable. The time plot
and the phase diagramillustrate the result, see Figure - 1.
Figure 1. Stability at E
1
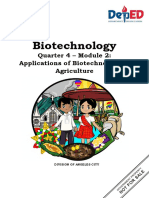
Example 2. In this example, we take r = 2.41, a = 1.19, b = 3.91 and c = 0.45. Computations yield E
2
= (0.37,
0.43). The eigen values are
1,2
= 0.5531 i0.7409 and
1,2
= 0.9246 < 1. Hence the criteria for stability are
satisfied [6]. The phase portrait in Figure - 2 shows a sink and the trajectory spirals towards the fixed point E
2
.
Figure 1. Stability at E
2
International Journal of Engineering Research and Development
e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com
Volume 6, Issue 5 (March 2013), PP. 01-05
4
Example 3. The parameters are r = 2.41, a = 1.43, b = 3.91, c = 0.25. The initial conditions on the populations of
the species are x(0) = 0.2 and y(0) = 0.3. The trajectory spirals inwards but does not approach a point. The
trajectory finally settles down as a limit cycle, see Figure-3.
Figure 3. Limit Cycle-1
The model (1) with parameters r = 2.31, a = 1.43, b = 3.91, c = 0.15 and initial conditions x(0) = 0.3,
y(0) = 0.4 exhibits another form of limit cycle. In this case the trajectory moves out in growing spirals and finally
approaches the limit cycle. The existence of limit cycles for selective range of parameters shows the oscillating
nature of the populations, see Figure-4.
VI. Figure 4. Limit Cycle 2
Studies in population dynamics focuses on identifying qualitative changes in the long-term dynamics
predicted by the model. Bifurcation theory deals with classifying, ordering and studying the regularity in the
dynamical changes. Bifurcation diagrams provide information about abrupt changes in the dynamics and the values
of parameters at which such changes occur. Also they provide information about the dependence of the dynamics on
a certain parameter. Qualitative changes are tied with bifurcation.
Figure 5. Bifurcation Diagram
Example 4. The parameters are assigned the values a = 1.43, b = 3.91, c = 0.25 and the bifurcation diagram is
plotted for the growth parameter in the range 2 - 3.9. Both prey and predator population undergoes chaos,Figure-5.
This paper, dealt with a 2-dimensional discrete predator - prey system. Fixed points are found and stability
conditions are obtained. The results are illustrated with suitable hypothetical sets of parameter values. Numerical
International Journal of Engineering Research and Development
e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com
Volume 6, Issue 5 (March 2013), PP. 01-05
5
simulations are presented to show the dynamical behavior of the system (1). Finally, bifurcation diagrams for both
species are presented.
REFERENCES
[1]. Abd-Elalim A. Elsadany, H. A. EL-Metwally, E. M. Elabbasy, H. N. Agiza, Chaos and bifurcation of a
nonlinear discrete prey-predator system, Computational Ecology and Software, 2012, 2(3):169-180.
[2]. Leah Edelstein-Keshet, Mathematical Models in Biology, SIAM, Random House, New York, 2005.
[3]. Marius Danca, Steliana Codreanu and Botond Bako, Detailed Analysis of a Nonlinear Prey-predator
Model, Journal of Biological Physics 23: 11-20, 1997.
[4]. J.D.Murray, Mathematical Biology I: An Introduction, 3-e, Springer International Edition, 2004.
[5]. Robert M.May, Simple Mathematical Models with very complicated dynamics,Nature, 261, 459
67(1976).
[6]. Saber Elaydi, An Introduction to Difference Equations, Third Edition, Springer International Edition,
First Indian Reprint, 2008.
[7]. L.M.Saha, Niteesh Sahni, Til Prasad Sarma, Measuring Chaos in Some Discrete Nonlinear Systems, IJEIT,
Vol. 2, Issue 5, Nov- 2012.
[8]. Sophia R.J.Jang, Jui-Ling Yu, Models of plant quality and larch bud moth interaction, Nonlinear Analysis,
doi:10.1016/j.na.2009.02.091.
[9]. Xiaoli Liu, Dongmei Xiao, Complex dynamic behaviors of a discrete-time predator prey system, Chaos,
Solutions and Fractals 32 (2007) 8094.
S-ar putea să vă placă și
- Router 1X3 - RTL Design and VerificationDocument10 paginiRouter 1X3 - RTL Design and VerificationIJERDÎncă nu există evaluări
- A Novel Method For Prevention of Bandwidth Distributed Denial of Service AttacksDocument8 paginiA Novel Method For Prevention of Bandwidth Distributed Denial of Service AttacksIJERDÎncă nu există evaluări
- Gold Prospecting Using Remote Sensing A Case Study of Sudan'Document5 paginiGold Prospecting Using Remote Sensing A Case Study of Sudan'IJERD0% (1)
- Influence of Tensile Behaviour of Slab On The Structural Behaviour of Shear Connection in Composite Beam Subjected To Hogging MomentDocument10 paginiInfluence of Tensile Behaviour of Slab On The Structural Behaviour of Shear Connection in Composite Beam Subjected To Hogging MomentIJERDÎncă nu există evaluări
- Reducing Corrosion Rate by Welding DesignDocument6 paginiReducing Corrosion Rate by Welding DesignIJERDÎncă nu există evaluări
- Mems Microphone InterfaceDocument4 paginiMems Microphone InterfaceIJERDÎncă nu există evaluări
- Application of Buckley-Leverett Equation in Modeling The Radius of Invasion in A Reservoir Undergoing Microbial Enhanced Oil RecoveryDocument10 paginiApplication of Buckley-Leverett Equation in Modeling The Radius of Invasion in A Reservoir Undergoing Microbial Enhanced Oil RecoveryIJERDÎncă nu există evaluări
- Study On The Fused Deposition Modelling in Additive ManufacturingDocument4 paginiStudy On The Fused Deposition Modelling in Additive ManufacturingIJERDÎncă nu există evaluări
- Active Power Exchange in Distributed Power-Flow Controller (DPFC) at Third Harmonic FrequencyDocument9 paginiActive Power Exchange in Distributed Power-Flow Controller (DPFC) at Third Harmonic FrequencyIJERDÎncă nu există evaluări
- A Blind Steganalysis On JPEG Gray Level Image Based On Statistical Features and Its Performance AnalysisDocument5 paginiA Blind Steganalysis On JPEG Gray Level Image Based On Statistical Features and Its Performance AnalysisIJERDÎncă nu există evaluări
- Spyware Triggering System by Particular String ValueDocument5 paginiSpyware Triggering System by Particular String ValueIJERDÎncă nu există evaluări
- Planar Internal Antenna Design For Cellular Applications & SAR AnalysisDocument7 paginiPlanar Internal Antenna Design For Cellular Applications & SAR AnalysisIJERDÎncă nu există evaluări
- Mitigation of Voltage Sag/Swell With Fuzzy Control Reduced Rating DVRDocument12 paginiMitigation of Voltage Sag/Swell With Fuzzy Control Reduced Rating DVRIJERDÎncă nu există evaluări
- Secure Image Transmission For Cloud Storage System Using Hybrid SchemeDocument9 paginiSecure Image Transmission For Cloud Storage System Using Hybrid SchemeIJERDÎncă nu există evaluări
- Seismic Drift Consideration in Soft Storied RCC Buildings: A Critical ReviewDocument5 paginiSeismic Drift Consideration in Soft Storied RCC Buildings: A Critical ReviewIJERDÎncă nu există evaluări
- Hardware Analysis of Resonant Frequency Converter Using Isolated Circuits and HF Transformer.Document8 paginiHardware Analysis of Resonant Frequency Converter Using Isolated Circuits and HF Transformer.IJERDÎncă nu există evaluări
- Gesture Gaming On The World Wide Web Using An Ordinary Web CameraDocument7 paginiGesture Gaming On The World Wide Web Using An Ordinary Web CameraIJERDÎncă nu există evaluări
- Importance of Measurements in Smart GridDocument3 paginiImportance of Measurements in Smart GridIJERDÎncă nu există evaluări
- MS-Extractor: An Innovative Approach To Extract Microsatellites On Y ChromosomeDocument10 paginiMS-Extractor: An Innovative Approach To Extract Microsatellites On Y ChromosomeIJERDÎncă nu există evaluări
- Moon-Bounce: A Boon For VHF DxingDocument5 paginiMoon-Bounce: A Boon For VHF DxingIJERDÎncă nu există evaluări
- Post Processing of SLM Ti-6Al-4V Alloy in Accordance With AMS 4928 StandardsDocument7 paginiPost Processing of SLM Ti-6Al-4V Alloy in Accordance With AMS 4928 StandardsIJERDÎncă nu există evaluări
- Treatment of Waste Water From Organic Fraction Incineration of Municipal Solid Waste (MSW) by Evaporation-Absorption ProcessDocument8 paginiTreatment of Waste Water From Organic Fraction Incineration of Municipal Solid Waste (MSW) by Evaporation-Absorption ProcessIJERDÎncă nu există evaluări
- Content Based Video Retrieval Using Integrated Feature Extraction and Personalization of ResultsDocument9 paginiContent Based Video Retrieval Using Integrated Feature Extraction and Personalization of ResultsIJERDÎncă nu există evaluări
- Simulated Analysis of Resonant Frequency Converter Using Different Tank Circuits.Document6 paginiSimulated Analysis of Resonant Frequency Converter Using Different Tank Circuits.IJERDÎncă nu există evaluări
- Study of Macro Level Properties of SCC Using GGBS and Lime Stone PowderDocument6 paginiStudy of Macro Level Properties of SCC Using GGBS and Lime Stone PowderIJERDÎncă nu există evaluări
- Joint State and Parameter Estimation by Extended Kalman Filter (EKF) TechniqueDocument11 paginiJoint State and Parameter Estimation by Extended Kalman Filter (EKF) TechniqueIJERDÎncă nu există evaluări
- Intelligent Learning Management System StartersDocument12 paginiIntelligent Learning Management System StartersIJERDÎncă nu există evaluări
- Analysis of Security Algorithms Used in E-Commerce and ATM TransactionsDocument6 paginiAnalysis of Security Algorithms Used in E-Commerce and ATM TransactionsIJERDÎncă nu există evaluări
- Experimental Study of Material Removal Efficiency in EDM Using Various Types of Dielectric OilDocument8 paginiExperimental Study of Material Removal Efficiency in EDM Using Various Types of Dielectric OilIJERDÎncă nu există evaluări
- Expositions On The Variation of Torsional-Distortional Stresses and Deformations in Box Girder BridgesDocument9 paginiExpositions On The Variation of Torsional-Distortional Stresses and Deformations in Box Girder BridgesIJERDÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Biology Today and Tomorrow With Physiology 5th Edition Starr Solutions Manual 1Document9 paginiBiology Today and Tomorrow With Physiology 5th Edition Starr Solutions Manual 1robert100% (32)
- Class 8 Winter Break Home-WorkDocument8 paginiClass 8 Winter Break Home-Workrani bloriaÎncă nu există evaluări
- Natural History of Ashkenazi IntelligenceDocument36 paginiNatural History of Ashkenazi IntelligenceMagnus Strömgren100% (1)
- Ghidul de Prevenire A Miopiei - de Dr. Kaisu VIIKARIDocument104 paginiGhidul de Prevenire A Miopiei - de Dr. Kaisu VIIKARICristian DamocÎncă nu există evaluări
- Test Bank For Introduction To Human Anatomy and Physiology 4th Edition by Pearl Solomon Isbn 10 0323239250 Isbn 13 9780323239257Document7 paginiTest Bank For Introduction To Human Anatomy and Physiology 4th Edition by Pearl Solomon Isbn 10 0323239250 Isbn 13 9780323239257carwynquanh4tuozÎncă nu există evaluări
- Isometric Exercises SamsonDocument30 paginiIsometric Exercises SamsonTom Hill78% (9)
- Year 10 Term 1 Exam Revision Guide For ScienceDocument3 paginiYear 10 Term 1 Exam Revision Guide For ScienceErastus MainaÎncă nu există evaluări
- Test 3Document13 paginiTest 3Huỳnh NgọcÎncă nu există evaluări
- Points To Remember: Morphology of Flowering PlantsDocument8 paginiPoints To Remember: Morphology of Flowering PlantsMuskan VarlaniÎncă nu există evaluări
- Chemistry FactsDocument2 paginiChemistry FactsabcSDÎncă nu există evaluări
- Class Anthozoa LectureDocument16 paginiClass Anthozoa LectureNora QuddsyÎncă nu există evaluări
- Pharmacology: A Career inDocument2 paginiPharmacology: A Career insnikt7863443Încă nu există evaluări
- What Are The Health Benefits of Soy?Document4 paginiWhat Are The Health Benefits of Soy?Irfan SuliansyahÎncă nu există evaluări
- NParks GDP Guidelines Version 3Document214 paginiNParks GDP Guidelines Version 3Lim Kang HaiÎncă nu există evaluări
- Research Paper On 3D Printed Prosthesis As A Better AlternativeDocument16 paginiResearch Paper On 3D Printed Prosthesis As A Better AlternativeTanbin Rafee100% (1)
- Xerophilia - V 04 No - 4-15 Dec 2015Document110 paginiXerophilia - V 04 No - 4-15 Dec 2015golf2010100% (1)
- Grade8 STE Biotech Q4 Module 2 Wk3-4 ADMDocument24 paginiGrade8 STE Biotech Q4 Module 2 Wk3-4 ADMJohn Patrick Abraham90% (10)
- Science Adventure 3Document178 paginiScience Adventure 3Zabal AristiÎncă nu există evaluări
- Endocrine System: QuestionsDocument15 paginiEndocrine System: QuestionsJeane Irish Paller EgotÎncă nu există evaluări
- Of Basques, Blood, and Blue PeopleDocument6 paginiOf Basques, Blood, and Blue PeopleVince MiglioreÎncă nu există evaluări
- Womersley Arterial Flow - SimpleDocument10 paginiWomersley Arterial Flow - SimplebhatsindhoorÎncă nu există evaluări
- Anatomy, Head and Neck, Temporomandibular Joint - StatPearls - NCBI BookshelfDocument8 paginiAnatomy, Head and Neck, Temporomandibular Joint - StatPearls - NCBI BookshelfDrishti ShahÎncă nu există evaluări
- Cassava Flour - Specification EAS 7402010Document8 paginiCassava Flour - Specification EAS 7402010Suresh PatelÎncă nu există evaluări
- Jurnal Bakteri 3Document9 paginiJurnal Bakteri 3Mufidz AnÎncă nu există evaluări
- Review of LaboratoryDocument48 paginiReview of LaboratoryIkhar RidhoÎncă nu există evaluări
- Unit Ii Biomedical Perspective in Gender and SexualityDocument46 paginiUnit Ii Biomedical Perspective in Gender and SexualityRowena Lanete ButaÎncă nu există evaluări
- CBSE Class 12 Biology Marking Scheme and Answer Key Term 1 2021 22Document4 paginiCBSE Class 12 Biology Marking Scheme and Answer Key Term 1 2021 22Prashanth 070Încă nu există evaluări
- GPB 321 Crop Improvement Manual FinalDocument71 paginiGPB 321 Crop Improvement Manual FinalSultan AhmadÎncă nu există evaluări
- Delfi Spec LimbProtectionSleeveDocument2 paginiDelfi Spec LimbProtectionSleeveabhishekbmcÎncă nu există evaluări
- Erickson's Psycho-Social Theory of DevelopmentDocument29 paginiErickson's Psycho-Social Theory of Developmentexodo loverÎncă nu există evaluări