S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Objective Type Questions Electrical EngineeringDocument224 paginiObjective Type Questions Electrical EngineeringPrajwal J K DasÎncă nu există evaluări
- Ceiling FanDocument6 paginiCeiling Fanswaggerz95Încă nu există evaluări
- 1s9qsen 11-12-14 Adl300-Qs enDocument134 pagini1s9qsen 11-12-14 Adl300-Qs enMohammed AL KhamisÎncă nu există evaluări
- Stability DefinitionsDocument42 paginiStability DefinitionsEzequiel Yazdani Cavazos100% (6)
- English Grammar TensesDocument38 paginiEnglish Grammar Tensesapi-283719185Încă nu există evaluări
- Ac and DC MotorDocument6 paginiAc and DC MotorKhairunnisa ZakiriÎncă nu există evaluări
- Calculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL StarterDocument5 paginiCalculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL Startererson1981Încă nu există evaluări
- Basic Motor TechnologyDocument32 paginiBasic Motor TechnologyChandaKundaÎncă nu există evaluări
- System Integration DepartmentDocument1 paginăSystem Integration DepartmentjannumitsÎncă nu există evaluări
- Storage ContainerDocument1 paginăStorage ContainerjannumitsÎncă nu există evaluări
- The Make in India Opportunity in Five Charts - Print View - LivemintDocument1 paginăThe Make in India Opportunity in Five Charts - Print View - LivemintjannumitsÎncă nu există evaluări
- Annual Maintenance Contract (Form)Document1 paginăAnnual Maintenance Contract (Form)jannumitsÎncă nu există evaluări
- RegistDocument1 paginăRegistjannumitsÎncă nu există evaluări
- Future Seven Rules To Stop Your Phone Taking Over Your LifeDocument4 paginiFuture Seven Rules To Stop Your Phone Taking Over Your LifejannumitsÎncă nu există evaluări
- Useful Formulas For PS Analysis & PF CalculationDocument7 paginiUseful Formulas For PS Analysis & PF CalculationjannumitsÎncă nu există evaluări
- What Does Language Level A1, A2, B1, B2, C1 and C2 MeanDocument1 paginăWhat Does Language Level A1, A2, B1, B2, C1 and C2 MeanjannumitsÎncă nu există evaluări
- Statement of PurposeDocument2 paginiStatement of PurposejannumitsÎncă nu există evaluări
- ODIN Meter An Electricity Energy Meter From ABB: Technical DocumentationDocument10 paginiODIN Meter An Electricity Energy Meter From ABB: Technical DocumentationjannumitsÎncă nu există evaluări
- Storm Master Rotor Tech 4-09Document4 paginiStorm Master Rotor Tech 4-09jannumitsÎncă nu există evaluări
- Safety Clearance Recommendations For TransformerDocument6 paginiSafety Clearance Recommendations For Transformerjannumits100% (1)
- 200 Top Electrical Q&ans PDFDocument26 pagini200 Top Electrical Q&ans PDFRajesh MachchaÎncă nu există evaluări
- Mahatransco Electrical Engineer Question PaperDocument15 paginiMahatransco Electrical Engineer Question PaperMangeshRudrawar100% (2)
- Direct Torque Control of Permanent Magnet Synchronous Motor Using Three-Level InverterDocument75 paginiDirect Torque Control of Permanent Magnet Synchronous Motor Using Three-Level InverterNadeem AnjumÎncă nu există evaluări
- The Difference Between Asynchronous and Synchronous GeneratorDocument2 paginiThe Difference Between Asynchronous and Synchronous Generatorbik_mesiloveÎncă nu există evaluări
- Cnyd Me 2011 SepDocument40 paginiCnyd Me 2011 SepfchumpitazÎncă nu există evaluări
- 3-Phase Induction MachinesDocument22 pagini3-Phase Induction Machinescallsandhya100% (3)
- No Load Test of IMDocument2 paginiNo Load Test of IM2K20/CEEE/23 Nishi Kant kumarÎncă nu există evaluări
- Static DriveDocument74 paginiStatic DriveDrive SynqÎncă nu există evaluări
- GATE 2014 Electrical Engineering Keys & Solution On 1st March (Evening Session)Document28 paginiGATE 2014 Electrical Engineering Keys & Solution On 1st March (Evening Session)Lokesh KumarÎncă nu există evaluări
- Anaysis of Single-Phase Induction Motors With Centrifuged RotorsDocument5 paginiAnaysis of Single-Phase Induction Motors With Centrifuged RotorsOsmar JuniorÎncă nu există evaluări
- Design and Protective Measures of A PFI-Plant PDFDocument105 paginiDesign and Protective Measures of A PFI-Plant PDFrehanÎncă nu există evaluări
- OIL SyllabusDocument40 paginiOIL SyllabusAbhishekÎncă nu există evaluări
- BEEE QuestionsDocument8 paginiBEEE QuestionsPavan KhetrapalÎncă nu există evaluări
- Synchronous Motor Operation1Document3 paginiSynchronous Motor Operation1Alfnan AlfnanÎncă nu există evaluări
- PED SyllabusDocument32 paginiPED SyllabusRoger RozarioÎncă nu există evaluări
- E&EE Autonomous Syllabus-B of B.E. 7&8 Sem Approved by BoS 201107230Document59 paginiE&EE Autonomous Syllabus-B of B.E. 7&8 Sem Approved by BoS 201107230sachin s.d.Încă nu există evaluări
- ECE 3650 Electric Machines Course Outline - Winter Term 2012Document3 paginiECE 3650 Electric Machines Course Outline - Winter Term 2012Quyen NguyenÎncă nu există evaluări
- Atv212hu30n4 Datasheet WW En-GbDocument12 paginiAtv212hu30n4 Datasheet WW En-GbksÎncă nu există evaluări
- 263Document14 pagini263Mohan YanamadalaÎncă nu există evaluări
- 4712 E EEM 4-3 Asynchronous Machines 300W ShortDocument20 pagini4712 E EEM 4-3 Asynchronous Machines 300W ShortAnderson Tony Ramos InfantesÎncă nu există evaluări
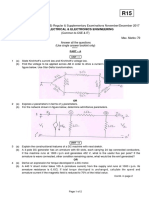
- 15A99301 Basic Electrical and Electronics Engineering - 3 PDFDocument2 pagini15A99301 Basic Electrical and Electronics Engineering - 3 PDFMadhuSudanÎncă nu există evaluări
- Modern Trends in Power Electronics & DrivesDocument62 paginiModern Trends in Power Electronics & DrivesNarendra SinhaÎncă nu există evaluări
- GGDocument7 paginiGGJonathan AmpisÎncă nu există evaluări