S-ar putea să vă placă și
- TS 3.02.01 RES I2Document12 paginiTS 3.02.01 RES I2Madhusudhan SrinivasanÎncă nu există evaluări
- 4-Policy Statement Busbar Configuration v3.0Document10 pagini4-Policy Statement Busbar Configuration v3.0Madhusudhan SrinivasanÎncă nu există evaluări
- Design and Installation of A 250 kVAr D-STATCOM For A Distribution SubstatioDocument9 paginiDesign and Installation of A 250 kVAr D-STATCOM For A Distribution SubstatioMadhusudhan SrinivasanÎncă nu există evaluări
- RG CE ENTSO-E Defence Plan Final 2011 Public 110131Document85 paginiRG CE ENTSO-E Defence Plan Final 2011 Public 110131Madhusudhan SrinivasanÎncă nu există evaluări
- A New Configuration of Two-Level 48-Pulse VSCs Based STATCOM For Voltage RegulatioDocument7 paginiA New Configuration of Two-Level 48-Pulse VSCs Based STATCOM For Voltage RegulatioMadhusudhan SrinivasanÎncă nu există evaluări
- 1-Policy Statement CT VT Cores Protection v1.0Document5 pagini1-Policy Statement CT VT Cores Protection v1.0Madhusudhan SrinivasanÎncă nu există evaluări
- Open Networks 2020 Ws1b p3 Operational Tripping Scheme ArrangementsDocument27 paginiOpen Networks 2020 Ws1b p3 Operational Tripping Scheme ArrangementsMadhusudhan SrinivasanÎncă nu există evaluări
- Full ReportDocument57 paginiFull Reportapi-3756989100% (4)
- Wind Turbine Generator System Power Quality Test Report For The Gaia Wind 11-kW Wind TurbineDocument37 paginiWind Turbine Generator System Power Quality Test Report For The Gaia Wind 11-kW Wind TurbineMadhusudhan SrinivasanÎncă nu există evaluări
- WETF-wind Power PDFDocument342 paginiWETF-wind Power PDFMadhusudhan SrinivasanÎncă nu există evaluări
- PQ Notes1 1Document26 paginiPQ Notes1 1bnewport1Încă nu există evaluări
- InTech-Power Quality in Grid Connected Wind Turbines PDFDocument25 paginiInTech-Power Quality in Grid Connected Wind Turbines PDFMadhusudhan SrinivasanÎncă nu există evaluări
- Voltage Drop in Distribution SystemsDocument4 paginiVoltage Drop in Distribution SystemsJanuary251987Încă nu există evaluări
- Voltage Quality of Grid Connected Wind TurbineDocument8 paginiVoltage Quality of Grid Connected Wind TurbineMadhusudhan SrinivasanÎncă nu există evaluări
- PQ Notes1 1Document26 paginiPQ Notes1 1bnewport1Încă nu există evaluări
- The Seven Types of Power Problems: White Paper 18Document21 paginiThe Seven Types of Power Problems: White Paper 18FELIXDEJÎncă nu există evaluări
- Smart Grid & Integration of Renewable Energy ResourcesDocument39 paginiSmart Grid & Integration of Renewable Energy ResourcesBipul KumarÎncă nu există evaluări
- The Seven Types of Power Problems: White Paper 18Document21 paginiThe Seven Types of Power Problems: White Paper 18FELIXDEJÎncă nu există evaluări
- WebsitesDocument1 paginăWebsitesMadhusudhan SrinivasanÎncă nu există evaluări
- Transformations - Dqo, Alpha-Beta and Symmetrical ComponentsDocument12 paginiTransformations - Dqo, Alpha-Beta and Symmetrical ComponentsMadhusudhan SrinivasanÎncă nu există evaluări
- Validation of GE System Planning SimulationsDocument8 paginiValidation of GE System Planning SimulationsMadhusudhan SrinivasanÎncă nu există evaluări
- Design Practices in Harmonic Analysis Studies Applied To Industrial Electrical Power SystemsDocument6 paginiDesign Practices in Harmonic Analysis Studies Applied To Industrial Electrical Power SystemsMadhusudhan SrinivasanÎncă nu există evaluări
- Three Phase Transformer Winding ConfigurationsDocument40 paginiThree Phase Transformer Winding ConfigurationsbudanaÎncă nu există evaluări
- Automation and Integration Solutions For Electric Power SystemsDocument16 paginiAutomation and Integration Solutions For Electric Power SystemsMadhusudhan SrinivasanÎncă nu există evaluări
- Motor StartingDocument16 paginiMotor StartingMadhusudhan SrinivasanÎncă nu există evaluări
- Conventional Power Plants EUDocument137 paginiConventional Power Plants EUMadhusudhan SrinivasanÎncă nu există evaluări
- DK2871 CH05 PDFDocument27 paginiDK2871 CH05 PDFMadhusudhan SrinivasanÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- NJ Lemon LawDocument2 paginiNJ Lemon Lawscd9750Încă nu există evaluări
- Diablosport Trinity Comprehensive User Manual Ver. 2.04 Page 1Document33 paginiDiablosport Trinity Comprehensive User Manual Ver. 2.04 Page 1wadeÎncă nu există evaluări
- Creed Corporation Is Considering Manufacturing A New Engine Designated As PDFDocument2 paginiCreed Corporation Is Considering Manufacturing A New Engine Designated As PDFDoreenÎncă nu există evaluări
- IGST Claimed3Document66 paginiIGST Claimed3premierexim1Încă nu există evaluări
- Amari Aerospace LTD Aluminium Alloy 6026 T9 143Document2 paginiAmari Aerospace LTD Aluminium Alloy 6026 T9 143Sunil Kumar ReddyÎncă nu există evaluări
- ERP Assignment Group 2Document30 paginiERP Assignment Group 2rajatjbp100% (2)
- Placement Calendar of Complete Year (Core Branches)Document3 paginiPlacement Calendar of Complete Year (Core Branches)Mikey SanoÎncă nu există evaluări
- I18n DC Info OutDocument27 paginiI18n DC Info OutVipin ChhibberÎncă nu există evaluări
- Nickson Mamisay - CV-Electronics ManagerDocument4 paginiNickson Mamisay - CV-Electronics ManagercarlomaderazoÎncă nu există evaluări
- 20120522022911 (1)Document153 pagini20120522022911 (1)FlankerSparrowÎncă nu există evaluări
- Project Name: (Insert Your Company Name and Logo Here)Document11 paginiProject Name: (Insert Your Company Name and Logo Here)amitsingh5Încă nu există evaluări
- IJ GIS en - CompressedDocument24 paginiIJ GIS en - CompressedpopaminoÎncă nu există evaluări
- EX2100 Excitation SystemDocument26 paginiEX2100 Excitation SystemJeziel Juárez100% (2)
- Getting Started With A Pmo WPDocument10 paginiGetting Started With A Pmo WPfehemaÎncă nu există evaluări
- Ikigai Original Thesis-2Document203 paginiIkigai Original Thesis-2Pedrosa NardÎncă nu există evaluări
- 2nd ANNUAL CHINA AERONAUTICAL MATERIALS AND PROCESS SUMMITDocument8 pagini2nd ANNUAL CHINA AERONAUTICAL MATERIALS AND PROCESS SUMMITGengbei ShiÎncă nu există evaluări
- Steinway & Sons: Buying A Legend: Presented By: Group 4Document20 paginiSteinway & Sons: Buying A Legend: Presented By: Group 4adiÎncă nu există evaluări
- IRITS-0617-034 HLA Heatless Desiccant Air DryerDocument2 paginiIRITS-0617-034 HLA Heatless Desiccant Air DryerEddie SantillánÎncă nu există evaluări
- SLJ Super Lift Jack ManualDocument10 paginiSLJ Super Lift Jack Manualaula8045040Încă nu există evaluări
- Jurnal e CommerceDocument8 paginiJurnal e Commercewawan_goodÎncă nu există evaluări
- 04) ZEEPod & Other Project ExperienceDocument72 pagini04) ZEEPod & Other Project Experiencebapaobao100% (1)
- MahindraDocument83 paginiMahindraRajanikanth Reddy100% (1)
- Arch WiresDocument38 paginiArch WireskirmaniÎncă nu există evaluări
- CCDC 23 Guide To BiddingDocument53 paginiCCDC 23 Guide To BiddingSerafim Soudade100% (1)
- Ejot - Delta PT DsDocument2 paginiEjot - Delta PT DsLucas VeronaÎncă nu există evaluări
- IBM and Siemens PLM SoftwareDocument8 paginiIBM and Siemens PLM SoftwareImmanuel HenneÎncă nu există evaluări
- G4a ElDocument6 paginiG4a ElEvan Valentine CalderwoodÎncă nu există evaluări
- Dual Stack Ip-Mpls and MPLS-TPDocument6 paginiDual Stack Ip-Mpls and MPLS-TPFelipe A. PérezÎncă nu există evaluări
- Test Bank For Horngrens Financial Managerial Accounting 4e by Nobles 0133359840Document55 paginiTest Bank For Horngrens Financial Managerial Accounting 4e by Nobles 0133359840JonathanHicksnrmo100% (36)
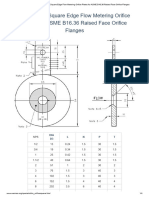
- Wermac - Dimensions of Square Edge Flow Metering Orifice Plates For ASME B16.36 Raised Face Orifice FlangesDocument4 paginiWermac - Dimensions of Square Edge Flow Metering Orifice Plates For ASME B16.36 Raised Face Orifice Flangestechnicalei sulfindoÎncă nu există evaluări