S-ar putea să vă placă și
- American Cars 1960-1972Document944 paginiAmerican Cars 1960-1972Caroline Bahna100% (9)
- American Cars 1960-1972Document944 paginiAmerican Cars 1960-1972Caroline Bahna100% (9)
- Static Analysis of A Bycycle FrameDocument24 paginiStatic Analysis of A Bycycle FrameADARSH SINGHÎncă nu există evaluări
- Understanding Crankshaft BalancingDocument5 paginiUnderstanding Crankshaft BalancingVontrex DergonÎncă nu există evaluări
- Vehicle VibrationDocument61 paginiVehicle VibrationAndrew ScheichÎncă nu există evaluări
- 3 CFD Analysis of Intake Valve ForDocument9 pagini3 CFD Analysis of Intake Valve Forbhavnamann1Încă nu există evaluări
- Vehicle Suspension Modeling NotesDocument25 paginiVehicle Suspension Modeling Notesahmetlutfu100% (2)
- Assignment ClutchDocument624 paginiAssignment ClutchSubhash KÎncă nu există evaluări
- The Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationDocument8 paginiThe Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationRitwik DasÎncă nu există evaluări
- Diesel Pumpset Selection HandbookDocument44 paginiDiesel Pumpset Selection Handbookahmedomar_953724702Încă nu există evaluări
- Design For NVH: Mpd575 DFX Jonathan WeaverDocument151 paginiDesign For NVH: Mpd575 DFX Jonathan WeaverJitendra ItankarÎncă nu există evaluări
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsDe la EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsÎncă nu există evaluări
- Fluent Tutorials 1Document912 paginiFluent Tutorials 1cagdasozen100% (1)
- Performance ParametersDocument19 paginiPerformance Parametersahmed50% (2)
- 1107ex Om PDFDocument120 pagini1107ex Om PDFJUNA RUSANDI S100% (1)
- Hierarchy Komponen-1Document57 paginiHierarchy Komponen-1HVariantzaÎncă nu există evaluări
- An Investigation of The Fatigue and Fretting PerformanceDocument19 paginiAn Investigation of The Fatigue and Fretting PerformanceKrishna PrasadÎncă nu există evaluări
- 2019 Ford F 250 - 350 - 450 - 550 Owners Manual Version 1 - Om - EN US - 05 - 2018Document661 pagini2019 Ford F 250 - 350 - 450 - 550 Owners Manual Version 1 - Om - EN US - 05 - 2018Alejandro ValenzuelaÎncă nu există evaluări
- D65P 12Document215 paginiD65P 12Sergey100% (5)
- BWM 0000215 01 PDFDocument24 paginiBWM 0000215 01 PDFAvishay TufikianÎncă nu există evaluări
- Generator RoomDocument3 paginiGenerator Roomparthiv100% (1)
- VHe New Hyundai-Kia 1,0 L Three-Cylinder Gasoline EngineDocument8 paginiVHe New Hyundai-Kia 1,0 L Three-Cylinder Gasoline EngineIndranil BhattacharyyaÎncă nu există evaluări
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesDe la EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesÎncă nu există evaluări
- Automotive Engine MaterialsDocument9 paginiAutomotive Engine Materialspera0% (1)
- Engineering Design Handbook - Automotive SeriesDocument264 paginiEngineering Design Handbook - Automotive SeriesIndranil Bhattacharyya100% (2)
- MotionView 11.0 TutorialsDocument371 paginiMotionView 11.0 TutorialsIndranil BhattacharyyaÎncă nu există evaluări
- Barry Isolators Selection GuideDocument16 paginiBarry Isolators Selection GuideJason E. CortésÎncă nu există evaluări
- 09 Suspension ConceptsDocument33 pagini09 Suspension Conceptskaka1211402Încă nu există evaluări
- Klein Technical GuidelineDocument21 paginiKlein Technical GuidelinePeter100% (2)
- Piaggio NRG Power DD (EN)Document180 paginiPiaggio NRG Power DD (EN)Manualles100% (8)
- Sae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawDocument12 paginiSae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawSrikanth SridharanÎncă nu există evaluări
- GEA Bock Open Type Compressors FDocument64 paginiGEA Bock Open Type Compressors FElif UsluÎncă nu există evaluări
- Engine Mounts and Powertrain Mounting SystemsDocument22 paginiEngine Mounts and Powertrain Mounting SystemsErdiner ParmaksızÎncă nu există evaluări
- Design of Shock Absorber For Car Front BumperDocument4 paginiDesign of Shock Absorber For Car Front BumperIJSTEÎncă nu există evaluări
- CFD Analysis of ManifoldDocument27 paginiCFD Analysis of ManifoldsravitejaÎncă nu există evaluări
- Lightweight SUV Frame Design DevelopmentDocument50 paginiLightweight SUV Frame Design DevelopmentAltairEnlightenÎncă nu există evaluări
- Workrolls Backup Rollers Cylindrical Roller Bearings Calculation Forces SelectionDocument2 paginiWorkrolls Backup Rollers Cylindrical Roller Bearings Calculation Forces SelectionJason BakerÎncă nu există evaluări
- Macpherson StrutDocument4 paginiMacpherson Strutponea92Încă nu există evaluări
- 101 Ways Extract Modal Parameters Which Is One Me PDFDocument13 pagini101 Ways Extract Modal Parameters Which Is One Me PDFValentino de GeorgeÎncă nu există evaluări
- MacPherson Strut Doc: Car Suspension SystemDocument7 paginiMacPherson Strut Doc: Car Suspension SystemNitin VarmanÎncă nu există evaluări
- Chassis AnalysisDocument11 paginiChassis AnalysisDaani OloraÎncă nu există evaluări
- RoehrigDocument40 paginiRoehrigGuille GarofaloÎncă nu există evaluări
- Suspension Assembly of BAJA ATVDocument4 paginiSuspension Assembly of BAJA ATVInfogain publicationÎncă nu există evaluări
- Baja Suspension ReportDocument3 paginiBaja Suspension ReportheroÎncă nu există evaluări
- A Modified Rainflow Counting Hong1991 PDFDocument5 paginiA Modified Rainflow Counting Hong1991 PDFRanu guptaÎncă nu există evaluări
- Editors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlDocument34 paginiEditors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlTech DudeÎncă nu există evaluări
- Classical Kinematis CHP 1-14Document95 paginiClassical Kinematis CHP 1-14kullayot suwantarojÎncă nu există evaluări
- 5245-New Valve Technologies Brochure-9.12Document5 pagini5245-New Valve Technologies Brochure-9.12Derrick ChongÎncă nu există evaluări
- IJERT-2015 Special Issue Structural Thermal Analysis Exhaust ManifoldDocument4 paginiIJERT-2015 Special Issue Structural Thermal Analysis Exhaust ManifoldKarthikÎncă nu există evaluări
- SAE 2002-01-3105 (Screen)Document14 paginiSAE 2002-01-3105 (Screen)rajdrklÎncă nu există evaluări
- Vibration IsolationDocument8 paginiVibration Isolationofitecnicajg100% (1)
- Finite Element Analysis of Disc Brake RotorDocument15 paginiFinite Element Analysis of Disc Brake RotorSyed Hafeez Peeran QuadriÎncă nu există evaluări
- Design and Analysis of Rack and Pinion Steering System ComponentsDocument22 paginiDesign and Analysis of Rack and Pinion Steering System ComponentsOmar MuñozÎncă nu există evaluări
- Steering Geometry and Caster Measurement PDFDocument18 paginiSteering Geometry and Caster Measurement PDFVinayChikÎncă nu există evaluări
- 4sthead Insight PDFDocument4 pagini4sthead Insight PDFGuilherme PfeilstickerÎncă nu există evaluări
- Noise and Vibration in PM Motors - Sources and RemediesDocument35 paginiNoise and Vibration in PM Motors - Sources and RemediesVirgilioÎncă nu există evaluări
- Numerical Simulation of Drag Reduction in Formula One CarsDocument5 paginiNumerical Simulation of Drag Reduction in Formula One Carssultanu89Încă nu există evaluări
- Banshee Scythe InfoDocument1 paginăBanshee Scythe InfobuilttorideÎncă nu există evaluări
- Test Rig For Shock AbsorberDocument15 paginiTest Rig For Shock AbsorberRajaSekarsajja100% (1)
- Balancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuDocument36 paginiBalancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuRatnesh Raman PathakÎncă nu există evaluări
- Torque and Power Measurement SecondDocument11 paginiTorque and Power Measurement SecondShukor Az100% (1)
- 29 Ritsumeikanuniversity SpecsDocument2 pagini29 Ritsumeikanuniversity SpecsMari MuthuÎncă nu există evaluări
- ECOmove Powertrain SpecificationsDocument6 paginiECOmove Powertrain SpecificationsjavierÎncă nu există evaluări
- 08a605 Vehicle Design IIDocument3 pagini08a605 Vehicle Design IIdhana555Încă nu există evaluări
- Variable Length Intake Plenum Improves Engine PerformanceDocument6 paginiVariable Length Intake Plenum Improves Engine PerformancePaulo Wey Costa0% (1)
- Fsae Suspension Design Brazil StyleDocument10 paginiFsae Suspension Design Brazil StyleRahulVMuralidharanÎncă nu există evaluări
- Suspension SubsystemDocument29 paginiSuspension SubsystemAkhilesh KatdareÎncă nu există evaluări
- Theoretical Calculation and Experimental Analysis of The Rigid Body ModesDocument9 paginiTheoretical Calculation and Experimental Analysis of The Rigid Body ModesAnonymous d23gWCRQÎncă nu există evaluări
- Characterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerDocument19 paginiCharacterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerOliver RailaÎncă nu există evaluări
- FSAE Design Spec Sheet for Jetison Academy's 2011 Competition VehicleDocument2 paginiFSAE Design Spec Sheet for Jetison Academy's 2011 Competition VehicleSureshMcÎncă nu există evaluări
- Rotary Piston EngineDocument13 paginiRotary Piston EngineLahcen Khalif0% (1)
- " Automatic Air Suspension System ": A Seminar ReportDocument16 pagini" Automatic Air Suspension System ": A Seminar ReportUmar Hayat100% (1)
- Dynamic Analysis of A Car Chassis PDFDocument5 paginiDynamic Analysis of A Car Chassis PDFsultanu89Încă nu există evaluări
- Brake Analysis and NVH Optimization Using MSC - nastRANDocument15 paginiBrake Analysis and NVH Optimization Using MSC - nastRANMihir ShahÎncă nu există evaluări
- Torque PendulumDocument5 paginiTorque PendulumAhmed AlaminÎncă nu există evaluări
- Leaf Spring DesignDocument210 paginiLeaf Spring DesignIndranil BhattacharyyaÎncă nu există evaluări
- 15-Suspension Systems and Components v2Document42 pagini15-Suspension Systems and Components v2Ismail AmlaÎncă nu există evaluări
- Dynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDocument6 paginiDynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDhrubajyoti DasÎncă nu există evaluări
- Experiences Tuning An Augmented Power Unit Sound System For Both Interior and Exterior of An Electric CarDocument7 paginiExperiences Tuning An Augmented Power Unit Sound System For Both Interior and Exterior of An Electric CarIndranil BhattacharyyaÎncă nu există evaluări
- 0022 460x (64) 90082Document9 pagini0022 460x (64) 90082Indranil BhattacharyyaÎncă nu există evaluări
- Dynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDocument6 paginiDynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDhrubajyoti DasÎncă nu există evaluări
- Kinematic Analysis of Roll Motion For A StrutSLA Suspension SystemDocument5 paginiKinematic Analysis of Roll Motion For A StrutSLA Suspension SystemIndranil BhattacharyyaÎncă nu există evaluări
- Multi Link SimulationDocument11 paginiMulti Link SimulationIndranil BhattacharyyaÎncă nu există evaluări
- Vehicle Design and IntegrationDocument17 paginiVehicle Design and Integrationmail_sambhu0% (1)
- 24SIGHT Case StudyDocument8 pagini24SIGHT Case StudyIndranil Bhattacharyya100% (1)
- Trita Ave - 2013 04Document202 paginiTrita Ave - 2013 04Indranil BhattacharyyaÎncă nu există evaluări
- Master of Technology in Department of Mechanical Engineering byDocument56 paginiMaster of Technology in Department of Mechanical Engineering byIndranil BhattacharyyaÎncă nu există evaluări
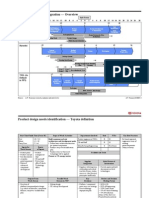
- Vehicle Development ProcessDocument22 paginiVehicle Development ProcessIndranil BhattacharyyaÎncă nu există evaluări
- Cabin NVHDocument8 paginiCabin NVHIndranil BhattacharyyaÎncă nu există evaluări
- CFDDocument95 paginiCFDIndranil BhattacharyyaÎncă nu există evaluări
- SN 05114Document14 paginiSN 05114Indranil BhattacharyyaÎncă nu există evaluări
- Consultancy BrochureDocument8 paginiConsultancy BrochureIndranil BhattacharyyaÎncă nu există evaluări
- 211CH1257Document99 pagini211CH1257Indranil BhattacharyyaÎncă nu există evaluări
- Cabin ThermalDocument7 paginiCabin ThermalIndranil BhattacharyyaÎncă nu există evaluări
- 10 RansDocument47 pagini10 RansEmad PouryazdanpanahÎncă nu există evaluări
- ANSYS-FLUENT Tutorial: United Arab Emirates University Spring, 2010Document57 paginiANSYS-FLUENT Tutorial: United Arab Emirates University Spring, 2010ramkumar121Încă nu există evaluări
- Fluid ManualDocument0 paginiFluid ManualIndranil BhattacharyyaÎncă nu există evaluări
- ANSYS-FLUENT Tutorial: United Arab Emirates University Spring, 2010Document57 paginiANSYS-FLUENT Tutorial: United Arab Emirates University Spring, 2010ramkumar121Încă nu există evaluări
- rr320305 Design of Machine Members IIDocument8 paginirr320305 Design of Machine Members IISRINIVASA RAO GANTAÎncă nu există evaluări
- NTPC Combined Cycle Power Plant ReportDocument45 paginiNTPC Combined Cycle Power Plant ReportPriya GuptaÎncă nu există evaluări
- XAVS450Document2 paginiXAVS450wilmar tabordaÎncă nu există evaluări
- Technical Data Sheet Technical Data Sheet Technical Data Sheet Technical Data Sheet P 800 M P 800 M P 800 M P 800 MDocument4 paginiTechnical Data Sheet Technical Data Sheet Technical Data Sheet Technical Data Sheet P 800 M P 800 M P 800 M P 800 MMounir YousfiÎncă nu există evaluări
- Adama Science and Technology UniversityDocument27 paginiAdama Science and Technology UniversityDereje SimionÎncă nu există evaluări
- RRCAT Cryogenics Facility and Cryocomponent DevelopmentDocument35 paginiRRCAT Cryogenics Facility and Cryocomponent DevelopmentHari Manasa Sai RaghavendraÎncă nu există evaluări
- 2004 atDocument3 pagini2004 atjohn luis MoralesÎncă nu există evaluări
- 2008 450 SXF EngineDocument28 pagini2008 450 SXF EnginecharlesÎncă nu există evaluări
- HPGRDC Ngic 2022 BrochureDocument22 paginiHPGRDC Ngic 2022 BrochureJayvir AtodariyaÎncă nu există evaluări
- Gu MT Moteur Adblue enDocument27 paginiGu MT Moteur Adblue engreen_way26Încă nu există evaluări
- Cat 349D2: Hydraulic ExcavatorDocument2 paginiCat 349D2: Hydraulic ExcavatorAkhmad SebehÎncă nu există evaluări
- Eiapp 01Document2 paginiEiapp 01ifpradogÎncă nu există evaluări
- HTC-8660 60TDocument16 paginiHTC-8660 60TMIchael TaczaÎncă nu există evaluări
- Systems 13 Fuel Systems S34 PDFDocument79 paginiSystems 13 Fuel Systems S34 PDFCemalettin öztoprakÎncă nu există evaluări
- Liaquat 150TPD Finished Kraft QuotationDocument39 paginiLiaquat 150TPD Finished Kraft QuotationloveboydkÎncă nu există evaluări
- Genie Boom Lifts Telescopic Spec d4d179Document2 paginiGenie Boom Lifts Telescopic Spec d4d179zakaria yahyaÎncă nu există evaluări
- WPS100SDocument5 paginiWPS100SMotekÎncă nu există evaluări
- Honda bf2 Bael 1100001 1199999 Owners Manual 107929Document45 paginiHonda bf2 Bael 1100001 1199999 Owners Manual 107929Jean DupondÎncă nu există evaluări
- Safe operation of small rollers PPEDocument1 paginăSafe operation of small rollers PPERonald AranhaÎncă nu există evaluări
- HT Howard - Cylinder Liner Fitting For Cars, Motorcycles, Vans, Classic and Modern EnginesDocument3 paginiHT Howard - Cylinder Liner Fitting For Cars, Motorcycles, Vans, Classic and Modern EnginesAndrés Alejandro PereiraÎncă nu există evaluări
- BPV Boek SWK MachinistDocument86 paginiBPV Boek SWK MachinistKlaas WakkerÎncă nu există evaluări