S-ar putea să vă placă și
- Travaux DirigesDocument32 paginiTravaux Dirigestarik outalÎncă nu există evaluări
- Presentation TuyauterieDocument26 paginiPresentation TuyauterieChaker Amir0% (1)
- Le développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionDe la EverandLe développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionÎncă nu există evaluări
- Unite de Fabrication de Couvercle en Beton Dossier TechniqueDocument6 paginiUnite de Fabrication de Couvercle en Beton Dossier TechniqueHoussamHannad50% (2)
- Schema Elecrikal Renault 11Document100 paginiSchema Elecrikal Renault 1124262380% (1)
- Acp SPSSDocument18 paginiAcp SPSSSaad ZanifiÎncă nu există evaluări
- Revision PDFDocument43 paginiRevision PDFdidoumaxÎncă nu există evaluări
- Moteur Tu5jp4Document13 paginiMoteur Tu5jp4José RodriguesÎncă nu există evaluări
- Manuel Epanet 2Document222 paginiManuel Epanet 2sosi2020100% (2)
- Cours UsinageDocument10 paginiCours UsinageAli TrikiÎncă nu există evaluări
- Cours UsinageDocument10 paginiCours UsinageAli TrikiÎncă nu există evaluări
- TP 03 Moteur ShuntDocument7 paginiTP 03 Moteur Shuntʚïɞ OùŠšàmà ʚïɞ89% (9)
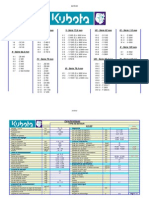
- Aprietes KubotaDocument78 paginiAprietes KubotaJOSEALBERICH80% (5)
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 paginiDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchÎncă nu există evaluări
- 1600Document51 pagini1600Cezar FlorinÎncă nu există evaluări
- Peugeot MoteurDw10 (2,0LHdi)Document28 paginiPeugeot MoteurDw10 (2,0LHdi)Rodolphe Sandrine VoisyÎncă nu există evaluări
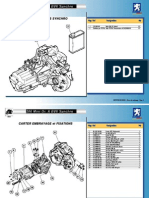
- Caja de Cambios (206 XS Desafío)Document9 paginiCaja de Cambios (206 XS Desafío)blancohccÎncă nu există evaluări
- Caracteristiques 2CV 1963-1970Document6 paginiCaracteristiques 2CV 1963-1970Jan MaňasÎncă nu există evaluări
- MC5000 FrenchDocument21 paginiMC5000 FrenchsinchicovichÎncă nu există evaluări
- Caja de Cambios Crabots (106 Maxi)Document9 paginiCaja de Cambios Crabots (106 Maxi)blancohccÎncă nu există evaluări
- HC50 S e 055 W B 38 M B (T38)Document12 paginiHC50 S e 055 W B 38 M B (T38)Franklin Gallardo ArayaÎncă nu există evaluări
- MS180 MS180CDocument24 paginiMS180 MS180CuimÎncă nu există evaluări
- Avon320dl SC V80371 + V80374Document13 paginiAvon320dl SC V80371 + V80374Karl Tellander100% (2)
- Bac GM Metro Juin95 Centre UsinageDocument24 paginiBac GM Metro Juin95 Centre UsinageMohamed Dridi100% (1)
- Machine de Debitage de CeinturesDocument14 paginiMachine de Debitage de CeinturesGuiliass100% (1)
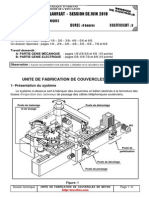
- Devoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR LotfiDocument12 paginiDevoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR Lotfizxhmnzao100% (2)
- Dossier Technique-Sommaire, DT1,2&3Document5 paginiDossier Technique-Sommaire, DT1,2&3Gamin'Încă nu există evaluări
- DT_DS2_3ST_23_24Document7 paginiDT_DS2_3ST_23_24Nejib JallouliÎncă nu există evaluări
- Vérin REXROTH FixationsDocument24 paginiVérin REXROTH FixationsSimon CocoÎncă nu există evaluări
- Définition de L'idée de ProjetDocument2 paginiDéfinition de L'idée de ProjethichemÎncă nu există evaluări
- Caja de Cambios (106 GTI Gr.a)Document9 paginiCaja de Cambios (106 GTI Gr.a)blancohccÎncă nu există evaluări
- Caja de Cambios (106 Kit Car 8V)Document10 paginiCaja de Cambios (106 Kit Car 8V)blancohccÎncă nu există evaluări
- Devoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument12 paginiDevoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi Slaheddinemoussa zainÎncă nu există evaluări
- Stihl-Hs45 Parts DiagramDocument26 paginiStihl-Hs45 Parts DiagramtunznathÎncă nu există evaluări
- DT_DS2_3ST_23_24Document7 paginiDT_DS2_3ST_23_24Nejib JallouliÎncă nu există evaluări
- Caja de Cambios (206 CC Copa)Document9 paginiCaja de Cambios (206 CC Copa)blancohccÎncă nu există evaluări
- 1975 CitroenDocument6 pagini1975 CitroenRafael SadiÎncă nu există evaluări
- D HPDocument52 paginiD HPSoufiane El OuezzaniÎncă nu există evaluări
- TMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEDocument8 paginiTMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEThierry BoulayÎncă nu există evaluări
- Technique Book BeuchatDocument301 paginiTechnique Book Beuchatsch_stefanÎncă nu există evaluări
- Re 102 KDocument24 paginiRe 102 KclegracielaÎncă nu există evaluări
- DT Tracteur Embarreur NOMENCLATUREDocument1 paginăDT Tracteur Embarreur NOMENCLATUREMehrez ZaafouriÎncă nu există evaluări
- 03 BDocument8 pagini03 BRavengerÎncă nu există evaluări
- AscenseurDocument22 paginiAscenseurAljane BelgacemÎncă nu există evaluări
- Stihl 032Document40 paginiStihl 032Rafael MoraisÎncă nu există evaluări
- DS1!12!13 4ST SOUSSE Complet Prod Pots MielDocument35 paginiDS1!12!13 4ST SOUSSE Complet Prod Pots Miellotfi75% (4)
- Ponce UseDocument7 paginiPonce UseAbderrazak MiassarÎncă nu există evaluări
- Caja de Cambios Crabots (309 - 306 GTI Gr.a)Document10 paginiCaja de Cambios Crabots (309 - 306 GTI Gr.a)blancohccÎncă nu există evaluări
- AnetDocument25 paginiAnetGerard DupondÎncă nu există evaluări
- FS48 FS52 FS56 305Document22 paginiFS48 FS52 FS56 305Philippe MartinÎncă nu există evaluări
- Theme 2 Tambour MoteurDocument7 paginiTheme 2 Tambour MoteurKenou Laudince100% (1)
- HaubanageDocument12 paginiHaubanageRosemary GuerreroÎncă nu există evaluări
- 724 - 904 - Catalogue de Pieces de RechangeDocument73 pagini724 - 904 - Catalogue de Pieces de RechangenicolasÎncă nu există evaluări
- Re140kre160k 302Document34 paginiRe140kre160k 302garrettgtÎncă nu există evaluări
- DS3 4ST 0809 DT GR Kairouan Unite DusinageDocument5 paginiDS3 4ST 0809 DT GR Kairouan Unite DusinageArwa Berrich0% (1)
- Bac STI GM Antilles Guyane Juin2001 SujetDocument30 paginiBac STI GM Antilles Guyane Juin2001 SujetAli TrikiÎncă nu există evaluări
- Sopladora 471KATDocument8 paginiSopladora 471KATishigoÎncă nu există evaluări
- Technologie de Construction CC 2014 2015 PDFDocument12 paginiTechnologie de Construction CC 2014 2015 PDFisrael melchisedechÎncă nu există evaluări
- 03 ADocument16 pagini03 AMélinda ArnoldÎncă nu există evaluări
- Suj 1 SMDocument6 paginiSuj 1 SMMouâd Bihi100% (1)
- Verins Cnomo IsoDocument21 paginiVerins Cnomo Isoyouri59490Încă nu există evaluări
- BTS2005 2 ComplementsDocument17 paginiBTS2005 2 Complementssaded05Încă nu există evaluări
- FR 4715 Brochure Rescue ToolsDocument32 paginiFR 4715 Brochure Rescue ToolsLoic FerlandaÎncă nu există evaluări
- FCS230 Vanne 3 Voies MotoriseeDocument11 paginiFCS230 Vanne 3 Voies MotoriseeMEÎncă nu există evaluări
- Technique Beton Systemes de Levage Et D Ancrage Section 2Document27 paginiTechnique Beton Systemes de Levage Et D Ancrage Section 2Nawfel MimouniÎncă nu există evaluări
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Document6 pagini3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- CFM - TechnoDocument18 paginiCFM - TechnoAli TrikiÎncă nu există evaluări
- 1 10 09 Crs Cotation FonctionnelleDocument7 pagini1 10 09 Crs Cotation FonctionnelleYnsip SmixÎncă nu există evaluări
- 209 RectificationDocument5 pagini209 RectificationSidi RachÎncă nu există evaluări
- Ex 14Document5 paginiEx 14Ali TrikiÎncă nu există evaluări
- Couple Outil-Piece 3Document4 paginiCouple Outil-Piece 3Mohamed Abed100% (1)
- (FS01) Intro Aux Liaisons MecaDocument3 pagini(FS01) Intro Aux Liaisons MecaAli TrikiÎncă nu există evaluări
- Activités PédagogiquesDocument3 paginiActivités PédagogiquesAli TrikiÎncă nu există evaluări
- 00174854001134482987Document40 pagini00174854001134482987Ali TrikiÎncă nu există evaluări
- Présentation 2Document2 paginiPrésentation 2Ali TrikiÎncă nu există evaluări
- Usinage Par AbrasionDocument1 paginăUsinage Par AbrasionmatozoÎncă nu există evaluări
- Notes de Cours TCH040 - H2011Document93 paginiNotes de Cours TCH040 - H2011Ali TrikiÎncă nu există evaluări
- Determination Des Parametres de CoupeDocument33 paginiDetermination Des Parametres de CoupeAli Triki0% (1)
- Abrasifs AgglomeresDocument14 paginiAbrasifs AgglomeresAli TrikiÎncă nu există evaluări
- ChapitreiDocument11 paginiChapitreiAli TrikiÎncă nu există evaluări
- Exam COR20Document6 paginiExam COR20Ali TrikiÎncă nu există evaluări
- ChapitreivDocument9 paginiChapitreivAli TrikiÎncă nu există evaluări
- Conditions de CoupeDocument8 paginiConditions de Coupemaraghni_hassine7592Încă nu există evaluări
- Bac STI GM Antilles Guyane Juin2001 SujetDocument30 paginiBac STI GM Antilles Guyane Juin2001 SujetAli TrikiÎncă nu există evaluări
- 1059 TP Doser Par ConductimetrieDocument3 pagini1059 TP Doser Par ConductimetrieAli TrikiÎncă nu există evaluări
- Systأ¨me globale et environnementDocument3 paginiSystأ¨me globale et environnementAli TrikiÎncă nu există evaluări
- 1057 TP Synthese ChimiqueDocument1 pagină1057 TP Synthese ChimiqueAli TrikiÎncă nu există evaluări
- Bac STI GM Antilles Guyane Juin2001 Corrigé DOCDocument11 paginiBac STI GM Antilles Guyane Juin2001 Corrigé DOCAli TrikiÎncă nu există evaluări
- PageDocument2 paginiPageAli TrikiÎncă nu există evaluări
- 4 Etude de Cas Systemes HydroliqueDocument45 pagini4 Etude de Cas Systemes HydroliqueAli TrikiÎncă nu există evaluări
- Tornos Dmag 200901048 Lub HLP Hydraulic FRDocument4 paginiTornos Dmag 200901048 Lub HLP Hydraulic FRAli TrikiÎncă nu există evaluări
- RapportLicence-Master - Methode de RedactionDocument1 paginăRapportLicence-Master - Methode de RedactionAli TrikiÎncă nu există evaluări
- Cours Capteurs Doc EleveDocument5 paginiCours Capteurs Doc EleveYoussef SadikÎncă nu există evaluări
- Diodes Et Applications2Document28 paginiDiodes Et Applications2Hafssa Ait AmarÎncă nu există evaluări
- Cefipa Exemple QCM SelectionDocument2 paginiCefipa Exemple QCM Selectionanashmimad100% (2)
- Chromatographie Sur Colonne Echangeuse D PDFDocument5 paginiChromatographie Sur Colonne Echangeuse D PDFمحمد دودو100% (3)
- Eoliennes PalerotorDocument11 paginiEoliennes PalerotorAbdellah MaÎncă nu există evaluări
- MCC Exos CorrDocument2 paginiMCC Exos CorrBounegab YoucefÎncă nu există evaluări
- ComplDocument37 paginiComplKader BakourÎncă nu există evaluări
- TC Maths Lecon 13 Nombres Complexes Et Géometrie Du Plan PDFDocument27 paginiTC Maths Lecon 13 Nombres Complexes Et Géometrie Du Plan PDFmassila sackoneÎncă nu există evaluări
- Cours Station de PompagesDocument76 paginiCours Station de PompagesOUSMANE BIAYEÎncă nu există evaluări
- Chapitre 1et 2 REGULATIONDocument40 paginiChapitre 1et 2 REGULATIONAmal ChafaiiÎncă nu există evaluări
- ExposéDocument3 paginiExposéMabrouk ZeghibÎncă nu există evaluări
- Serrage BrideDocument26 paginiSerrage Bridesebastienschlesser100% (1)
- ICPEED14Document7 paginiICPEED14Dadi AzizÎncă nu există evaluări
- AEC - Canada - Spiral Wound GasketDocument12 paginiAEC - Canada - Spiral Wound Gasketfujiman35Încă nu există evaluări
- Chap06 - Couplage Et Modelisation Des MS A Aimants Permanents PDFDocument39 paginiChap06 - Couplage Et Modelisation Des MS A Aimants Permanents PDFghadaÎncă nu există evaluări
- Fiche Technique de La Resine HIT-RE 500 Et Tige HIT-V Fiche Technique ASSET DOC LOC 1923018Document8 paginiFiche Technique de La Resine HIT-RE 500 Et Tige HIT-V Fiche Technique ASSET DOC LOC 1923018pedromjmoreiraÎncă nu există evaluări
- CiamDocument10 paginiCiamdakouriloba1207Încă nu există evaluări
- God PodDocument2 paginiGod PodDahmaniÎncă nu există evaluări
- Chapitre 1Document4 paginiChapitre 1Yassine KnazÎncă nu există evaluări
- Devoir de Synthèse N°3 - Physique - 3ème Technique (2011-2012) MR Fezai Mourad PDFDocument3 paginiDevoir de Synthèse N°3 - Physique - 3ème Technique (2011-2012) MR Fezai Mourad PDFLotfi BoucharebÎncă nu există evaluări
- LumiereDocument7 paginiLumiereFadoua KhmaissiaÎncă nu există evaluări
- Orsay 30112013 SolutionDocument7 paginiOrsay 30112013 SolutionkprepaaÎncă nu există evaluări
- STI Maths Génie Méca Des MatériauxDocument5 paginiSTI Maths Génie Méca Des MatériauxChristophe MceTvÎncă nu există evaluări
- Deux ForcesDocument4 paginiDeux ForcesMustapha ElhafiÎncă nu există evaluări
- ConductanceDocument6 paginiConductanceAbderrahim BoulanouarÎncă nu există evaluări