S-ar putea să vă placă și
- AN491 - Power Supply Rejection For Low-Jitter ClocksDocument8 paginiAN491 - Power Supply Rejection For Low-Jitter ClocksJohanes SetiawanÎncă nu există evaluări
- A Low Power, and Low Signal 5-Bit 25msamples/s Pipelined ADC For Monolithic Active PixelsDocument5 paginiA Low Power, and Low Signal 5-Bit 25msamples/s Pipelined ADC For Monolithic Active Pixelstajmjcet_123Încă nu există evaluări
- Proyecto. CrossoverDocument15 paginiProyecto. CrossoverAppa D. LuffyÎncă nu există evaluări
- Power Supply Noise Measurement 1290016135Document12 paginiPower Supply Noise Measurement 1290016135rotexÎncă nu există evaluări
- Hardware Noise Reduction Techniques in Embedded SystemsDocument15 paginiHardware Noise Reduction Techniques in Embedded SystemsmrezafarahrazÎncă nu există evaluări
- Audio Amplifier for Cell Phone EngineeringDocument16 paginiAudio Amplifier for Cell Phone EngineeringKrishna DhootÎncă nu există evaluări
- MS 2066Document16 paginiMS 2066Anonymous xokGtxhÎncă nu există evaluări
- DC DC Converters Output NoiseDocument10 paginiDC DC Converters Output NoiseMallickarjuna AsÎncă nu există evaluări
- Analyze Audio Distortion with THD AnalyzersDocument32 paginiAnalyze Audio Distortion with THD AnalyzersYolandaIbáñezÎncă nu există evaluări
- Performance Very Low Frequency Filters: Design Considerations For HighDocument4 paginiPerformance Very Low Frequency Filters: Design Considerations For Highmvmuthukumar88Încă nu există evaluări
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 paginiTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaÎncă nu există evaluări
- Full Report - E1Document13 paginiFull Report - E1Naddy MohdÎncă nu există evaluări
- Lem In2000 Paper v4b SroDocument9 paginiLem In2000 Paper v4b SromarinkokÎncă nu există evaluări
- Group 9 Panilag TabucalDocument26 paginiGroup 9 Panilag Tabucalallenpanilag24Încă nu există evaluări
- Noise Considerations For Integrated Pressure Sensors: Application NoteDocument7 paginiNoise Considerations For Integrated Pressure Sensors: Application NoteCarlos TibussiÎncă nu există evaluări
- Vibration Monitoring SystemDocument15 paginiVibration Monitoring SystemusmannasrullahÎncă nu există evaluări
- The Basics of Radio System DesignDocument7 paginiThe Basics of Radio System DesignMatthew CarterÎncă nu există evaluări
- The Basics of Anti-Aliasing - Using Switched-Capacitor Filters (Maxim Integrated Tutorials-Switched Cap)Document5 paginiThe Basics of Anti-Aliasing - Using Switched-Capacitor Filters (Maxim Integrated Tutorials-Switched Cap)arnoldo3551Încă nu există evaluări
- LNA Design: Iulian Rosu, YO3DAC / VA3IULDocument12 paginiLNA Design: Iulian Rosu, YO3DAC / VA3IULNoor Azreena Ab WahabÎncă nu există evaluări
- The Integrating A/D Converter (ICL7135) : Application Note February 1999Document5 paginiThe Integrating A/D Converter (ICL7135) : Application Note February 1999ytnateÎncă nu există evaluări
- Ultra Low Noise Quadrature Product DetectorDocument12 paginiUltra Low Noise Quadrature Product Detectorlu1agpÎncă nu există evaluări
- A 2.4-Ghz Low-Flicker-Noise Cmos Sub-Harmonic ReceiverDocument11 paginiA 2.4-Ghz Low-Flicker-Noise Cmos Sub-Harmonic ReceiverdabalejoÎncă nu există evaluări
- 24 DB Octave 2 and 3-Way Linkwitz-Riley Electronic CrossoverDocument12 pagini24 DB Octave 2 and 3-Way Linkwitz-Riley Electronic CrossoverMarcelo ZapataÎncă nu există evaluări
- Low Noise Amplifier Design Using 0.35 Μm Sige Bicmos Technology For Wlan/Wimax ApplicationsDocument5 paginiLow Noise Amplifier Design Using 0.35 Μm Sige Bicmos Technology For Wlan/Wimax ApplicationssunilsheelavantÎncă nu există evaluări
- Chopper Amplifier ThesisDocument8 paginiChopper Amplifier Thesisyessicadiaznorthlasvegas100% (2)
- Adi Design SolutionDocument7 paginiAdi Design SolutionMark John Servado AgsalogÎncă nu există evaluări
- LTC6268 Photodiode AmplifierDocument7 paginiLTC6268 Photodiode Amplifierestraj1954Încă nu există evaluări
- Agilent AN 1287-4 Network Analyzer Measurements: Filter and Amplifier ExamplesDocument7 paginiAgilent AN 1287-4 Network Analyzer Measurements: Filter and Amplifier ExamplesgiorboscoloÎncă nu există evaluări
- CrossoverDocument12 paginiCrossoverManoj JoshiÎncă nu există evaluări
- An-779 Low-Distortion 1.6 To 30 MHZ SSB Driver DesignsDocument10 paginiAn-779 Low-Distortion 1.6 To 30 MHZ SSB Driver DesignsEdward YanezÎncă nu există evaluări
- Semiconductor Application Note: Archived by Freescale Semiconductor, Inc. 2005Document8 paginiSemiconductor Application Note: Archived by Freescale Semiconductor, Inc. 2005Shuvo RashidÎncă nu există evaluări
- Agilent 34970A Data Acquistion / Switch Unit: User's GuideDocument18 paginiAgilent 34970A Data Acquistion / Switch Unit: User's GuideUttam MishraÎncă nu există evaluări
- Paper LC Vco SohiniDocument5 paginiPaper LC Vco SohiniDr-Umakanta NandaÎncă nu există evaluări
- A 100MHz To 500MHz Low Noise Feedback Amplifier Using ATF-54143 (AN5057 Avago)Document8 paginiA 100MHz To 500MHz Low Noise Feedback Amplifier Using ATF-54143 (AN5057 Avago)XollloXÎncă nu există evaluări
- Circuit Note: High Performance, 12-Bit, 500 MSPS Wideband Receiver With Antialiasing FilterDocument6 paginiCircuit Note: High Performance, 12-Bit, 500 MSPS Wideband Receiver With Antialiasing Filtersanjay_drdo237Încă nu există evaluări
- 24 dB/Octave Linkwitz-Riley Electronic Crossover GuideDocument11 pagini24 dB/Octave Linkwitz-Riley Electronic Crossover Guideoemar_djokers0% (1)
- Improve Two-Tone, Third-Order Intermodulation TestingDocument5 paginiImprove Two-Tone, Third-Order Intermodulation TestingSteve AyalaÎncă nu există evaluări
- Band Pass Filter DesignDocument12 paginiBand Pass Filter DesignnhzaidiÎncă nu există evaluări
- Linear Amps For Mobile OperationDocument10 paginiLinear Amps For Mobile OperationIan McNairÎncă nu există evaluări
- VCO SpecificationDocument3 paginiVCO Specificationsunil_11100% (1)
- A 5.8-Ghz High Efficient, Low Power, Low Phase Noise Cmos Vco For Ieee 802.11ADocument4 paginiA 5.8-Ghz High Efficient, Low Power, Low Phase Noise Cmos Vco For Ieee 802.11ARitika SinghÎncă nu există evaluări
- Bioelectric Potential Amplfier Design: Senior Design Project P09004Document30 paginiBioelectric Potential Amplfier Design: Senior Design Project P09004Liliana Maria Plata SarmientoÎncă nu există evaluări
- Cascode Amp Design Reduces DistortionDocument4 paginiCascode Amp Design Reduces DistortionRaulh PerezÎncă nu există evaluări
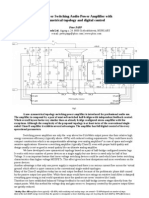
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDocument3 paginiHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPÎncă nu există evaluări
- Design of Filters To Reduce Harmonic Distortion inDocument8 paginiDesign of Filters To Reduce Harmonic Distortion inNatanael Acencio Rijo100% (1)
- Jantzi Snelgrove Sigma Delta ModulatorDocument4 paginiJantzi Snelgrove Sigma Delta ModulatorMaciej KlimkiewiczÎncă nu există evaluări
- 10 1 1 464 2858Document31 pagini10 1 1 464 2858hariprasad123450% (1)
- Design of A Low Power 5Ghz Cmos Radio Frequency - Low Noise AmplifierDocument5 paginiDesign of A Low Power 5Ghz Cmos Radio Frequency - Low Noise AmplifierVignesh BarathiÎncă nu există evaluări
- CrossOver Series Vs ParallelDocument12 paginiCrossOver Series Vs ParallelTjunKiatÎncă nu există evaluări
- On The Stability of MMIC's Using Transistors With Inductive Source FeedbackDocument4 paginiOn The Stability of MMIC's Using Transistors With Inductive Source FeedbackRomualdo Begale PrudêncioÎncă nu există evaluări
- An 00008Document5 paginiAn 00008ClenaÎncă nu există evaluări
- Audio Level Control With Resistive OptocouplerDocument9 paginiAudio Level Control With Resistive Optocouplerkok6100% (1)
- LM1894 Dynamic Noise Reduction System DNR: General DescriptionDocument10 paginiLM1894 Dynamic Noise Reduction System DNR: General DescriptionKoszegi AttilaÎncă nu există evaluări
- Blind Paper SpineDocument5 paginiBlind Paper SpineJoao PauloÎncă nu există evaluări
- Mkm1133 Instrumentation and Control SystemDocument19 paginiMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiÎncă nu există evaluări
- High-Performance D/A-Converters: Application to Digital TransceiversDe la EverandHigh-Performance D/A-Converters: Application to Digital TransceiversÎncă nu există evaluări
- 6.1 Single Compare Match Mode - Programming DsPIC MCUs in CDocument4 pagini6.1 Single Compare Match Mode - Programming DsPIC MCUs in CDuc HuynhÎncă nu există evaluări
- 10 DOF IMU Sensor B SchematicDocument1 pagină10 DOF IMU Sensor B SchematicDuc Huynh100% (2)
- Solidworks Deoroller Tutorial PDFDocument36 paginiSolidworks Deoroller Tutorial PDFDuc HuynhÎncă nu există evaluări
- Hill ml87Document12 paginiHill ml87Duc HuynhÎncă nu există evaluări
- 3 OptimizingsearchDocument18 pagini3 OptimizingsearchDuc HuynhÎncă nu există evaluări
- SystemQ MultipleCPU PDFDocument268 paginiSystemQ MultipleCPU PDFDuc HuynhÎncă nu există evaluări
- PS Mpu 9255Document42 paginiPS Mpu 9255Duc HuynhÎncă nu există evaluări
- PWM Motor ControllerDocument44 paginiPWM Motor ControllerTrương Tuấn VũÎncă nu există evaluări
- InTech-Optimization and Synthesis of A Robot Fish MotionDocument23 paginiInTech-Optimization and Synthesis of A Robot Fish MotionDuc HuynhÎncă nu există evaluări
- Wiegand Protocol Format Pr25Document2 paginiWiegand Protocol Format Pr25Duc HuynhÎncă nu există evaluări
- Application Essays The Writing CenterDocument7 paginiApplication Essays The Writing CenterJordy13Încă nu există evaluări
- Software PID Control of An Inverted Pendulum Using The PIC16F684Document14 paginiSoftware PID Control of An Inverted Pendulum Using The PIC16F684Antony Charles TejadaÎncă nu există evaluări
- 20900624Document3 pagini20900624Duc HuynhÎncă nu există evaluări
- Code đo và khiển nhiệt độDocument6 paginiCode đo và khiển nhiệt độDuc HuynhÎncă nu există evaluări
- Software PID Control of An Inverted Pendulum Using The PIC16F684Document14 paginiSoftware PID Control of An Inverted Pendulum Using The PIC16F684Antony Charles TejadaÎncă nu există evaluări
- ReadmeDocument7 paginiReadmeAlejandro PonziniÎncă nu există evaluări
- Electronic Components, Parts and Their FunctionDocument4 paginiElectronic Components, Parts and Their FunctionRoldan LepartoÎncă nu există evaluări
- TDA7269ADocument7 paginiTDA7269ACojocar FlorinÎncă nu există evaluări
- JSSSTU BE Scheme Syllabus PDFDocument167 paginiJSSSTU BE Scheme Syllabus PDFMohammed Idrees IdreesÎncă nu există evaluări
- Radio Test Procedure ManualDocument161 paginiRadio Test Procedure ManualQll Communications100% (1)
- 05 PNDB Power Net Distribution Box-01-01Document1 pagină05 PNDB Power Net Distribution Box-01-01Isaac YañezÎncă nu există evaluări
- Maxim Trimless Vco DesignDocument6 paginiMaxim Trimless Vco DesignVedran Ibrahimovic100% (2)
- MEC Notes by Swamy PDFDocument217 paginiMEC Notes by Swamy PDFRajeevSangamÎncă nu există evaluări
- Tl022 TexasDocument10 paginiTl022 Texasenzo_60Încă nu există evaluări
- Updated Electronics Module 1 Question BankDocument3 paginiUpdated Electronics Module 1 Question Bankblehbo100% (1)
- Feniex 4200 Controller Instruction Manual V2Document10 paginiFeniex 4200 Controller Instruction Manual V2donald_wilson4741Încă nu există evaluări
- As19 h1g PDFDocument12 paginiAs19 h1g PDFronald sosaÎncă nu există evaluări
- Sh030107r - MR J4 - A - (RJ) - MR J4 03A6 (RJ) Servo Amplifier Instruction ManualDocument908 paginiSh030107r - MR J4 - A - (RJ) - MR J4 03A6 (RJ) Servo Amplifier Instruction ManualTp LinkÎncă nu există evaluări
- LM324 PDFDocument4 paginiLM324 PDFCarolina IskandarÎncă nu există evaluări
- Mamf-011015: X-Band Multifunction Mmic 8 - 11 GHZDocument17 paginiMamf-011015: X-Band Multifunction Mmic 8 - 11 GHZYumnaÎncă nu există evaluări
- CQ-DATV95 May 2021Document30 paginiCQ-DATV95 May 2021Benjamin DoverÎncă nu există evaluări
- Qx2442usb Qx2222usb Qx1832usb Qx1622usb M enDocument26 paginiQx2442usb Qx2222usb Qx1832usb Qx1622usb M enLAVINIA VIORICA POPAÎncă nu există evaluări
- KTN50 2Document41 paginiKTN50 2cunitchosserviceÎncă nu există evaluări
- FM3 Release NotesDocument17 paginiFM3 Release NotesIan MannÎncă nu există evaluări
- Lab ManualDocument17 paginiLab ManualSatyam Govila100% (1)
- BNP C3015 PDFDocument231 paginiBNP C3015 PDFibraheemÎncă nu există evaluări
- Lwmirror2 3.0-H-004 (A0) Mirror2 3.0Document56 paginiLwmirror2 3.0-H-004 (A0) Mirror2 3.0Pavel75% (4)
- Service Manual CentrifugeDocument42 paginiService Manual CentrifugemewkaharudinÎncă nu există evaluări
- Signal GenerationDocument13 paginiSignal GenerationLara Jane ReyesÎncă nu există evaluări
- भारत में निर्मित उत्पादों का समर्थनDocument56 paginiभारत में निर्मित उत्पादों का समर्थनSreejith S NairÎncă nu există evaluări
- Tannoy Hts Home Theatre System: Satellite SpeakerDocument2 paginiTannoy Hts Home Theatre System: Satellite SpeakerAnonymous IwqK1NlÎncă nu există evaluări
- Model APS-57E Table of Contents:: Installation Manual Keyless Entry and Remote Start SystemDocument24 paginiModel APS-57E Table of Contents:: Installation Manual Keyless Entry and Remote Start Systemmaria gonzalezÎncă nu există evaluări
- N-Channel Silicon Junction Field Effect Transistor: DescriptionDocument4 paginiN-Channel Silicon Junction Field Effect Transistor: DescriptionKoky HSÎncă nu există evaluări
- Denox2 - 20-DenEdit-1 2 PDFDocument25 paginiDenox2 - 20-DenEdit-1 2 PDFS M NaveedÎncă nu există evaluări
- Samsung sgh-l770 Service Manual PDFDocument21 paginiSamsung sgh-l770 Service Manual PDFjose03Încă nu există evaluări