S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Perkins Sets - Generator Set - Technical Operation and Maintenance Manual - TMANP - US - May 1998 - OLYMPIANDocument49 paginiPerkins Sets - Generator Set - Technical Operation and Maintenance Manual - TMANP - US - May 1998 - OLYMPIANalstomÎncă nu există evaluări
- FAT Procedure For PLC SystemsDocument52 paginiFAT Procedure For PLC SystemsJaison JoseÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Systems Atpl PDFDocument111 paginiSystems Atpl PDFMay Be100% (1)
- SOP 11-16 V3 - Protection Requirements For Embedded GeneratorsDocument33 paginiSOP 11-16 V3 - Protection Requirements For Embedded GeneratorsJeyson Ramírez GonzálezÎncă nu există evaluări
- Nota Padat Fizik F5 ElectromagnetDocument36 paginiNota Padat Fizik F5 Electromagnetslokkro100% (40)
- Unit Iii - 04.09.2021Document94 paginiUnit Iii - 04.09.2021G.L. Jai Purushotham RajÎncă nu există evaluări
- PHY G10 Q2 W10 D3 RevDocument9 paginiPHY G10 Q2 W10 D3 RevVictorino Victorino Butron100% (1)
- Operation and Maintenance Manual of WP13D Series Diesel EnginesDocument26 paginiOperation and Maintenance Manual of WP13D Series Diesel EnginesMontasserÎncă nu există evaluări
- White-Paper Peltiertechnik 02-2013 EDocument15 paginiWhite-Paper Peltiertechnik 02-2013 EArief Noor RahmanÎncă nu există evaluări
- Rigol DS1054Z Schematic FrontEndDocument1 paginăRigol DS1054Z Schematic FrontEndArief Noor RahmanÎncă nu există evaluări
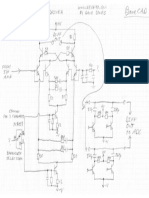
- Rigol DS1054Z Schematic DiffAmp PDFDocument1 paginăRigol DS1054Z Schematic DiffAmp PDFArief Noor RahmanÎncă nu există evaluări
- VLSI System Design For Automotive ControlDocument7 paginiVLSI System Design For Automotive ControlArief Noor RahmanÎncă nu există evaluări
- 1996 CUG Presentation Nonblocking AssignsDocument26 pagini1996 CUG Presentation Nonblocking AssignsArief Noor RahmanÎncă nu există evaluări
- l6561 PFC AnDocument21 paginil6561 PFC AnArief Noor RahmanÎncă nu există evaluări
- Modeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFDocument12 paginiModeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFArief Noor RahmanÎncă nu există evaluări
- A Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSDocument6 paginiA Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSArief Noor RahmanÎncă nu există evaluări
- Comparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesDocument6 paginiComparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesArief Noor RahmanÎncă nu există evaluări
- A New Model of The Double-Feed Induction Generator Wind TurbineDocument7 paginiA New Model of The Double-Feed Induction Generator Wind TurbineArief Noor RahmanÎncă nu există evaluări
- Back To Back ConverterDocument114 paginiBack To Back ConverterMateo Jimenez CastañoÎncă nu există evaluări
- MPC of Condesate Distillation ColumnDocument9 paginiMPC of Condesate Distillation ColumnArief Noor RahmanÎncă nu există evaluări
- 3 How To Create The PartsDocument47 pagini3 How To Create The PartsArief Noor RahmanÎncă nu există evaluări
- 2N2222 Transistor BJTDocument2 pagini2N2222 Transistor BJTMauricioGSÎncă nu există evaluări
- WorkstationDocument160 paginiWorkstationArief Noor RahmanÎncă nu există evaluări
- 3 How To Create The PartsDocument47 pagini3 How To Create The PartsArief Noor RahmanÎncă nu există evaluări
- Progress 3Document5 paginiProgress 3Arief Noor RahmanÎncă nu există evaluări
- DECS15 Product BulletinDocument8 paginiDECS15 Product Bulletinraghav4life8724Încă nu există evaluări
- QuestionsDocument34 paginiQuestionsHENIGUEDRIÎncă nu există evaluări
- Electrical Elements of Lift Technology Ed 3Document51 paginiElectrical Elements of Lift Technology Ed 3Fiorella Amer CarrÎncă nu există evaluări
- Cpd200 Genset PG AlsdDocument26 paginiCpd200 Genset PG Alsdoscar72008Încă nu există evaluări
- Power Management System: Including Generator ProtectionDocument2 paginiPower Management System: Including Generator ProtectionVictor EugenÎncă nu există evaluări
- P3 - Automatic Regulation of Remote VoltageDocument2 paginiP3 - Automatic Regulation of Remote VoltageksajjÎncă nu există evaluări
- BacComber System1 PDFDocument59 paginiBacComber System1 PDFVenkates AdhinarayananÎncă nu există evaluări
- My BHEL Report (Block 1)Document53 paginiMy BHEL Report (Block 1)Appu Kumar75% (4)
- MAY 2022 Surplus Record Machinery & Equipment DirectoryDocument720 paginiMAY 2022 Surplus Record Machinery & Equipment DirectorySurplus RecordÎncă nu există evaluări
- Air-7000 Manual EnglishDocument7 paginiAir-7000 Manual EnglishClaudiu PastorÎncă nu există evaluări
- Module 2J Synchronization of Alternators in ParallelDocument25 paginiModule 2J Synchronization of Alternators in Parallelsнıkαмαяυ NaraÎncă nu există evaluări
- MV January 2014 EEDocument10 paginiMV January 2014 EEMargo Isay EriveÎncă nu există evaluări
- EET202 - Ktu QbankDocument8 paginiEET202 - Ktu QbankJisha KuruvillaÎncă nu există evaluări
- Reozt Reozt: Model: ModelDocument4 paginiReozt Reozt: Model: Modelrendi valentinoÎncă nu există evaluări
- TDA2086ADocument14 paginiTDA2086AMikhaelA.RodriguezÎncă nu există evaluări
- List of EnclosuresDocument4 paginiList of EnclosuresKec M&BDÎncă nu există evaluări
- Test Report (QSK50-G4)Document6 paginiTest Report (QSK50-G4)Mazen SalibaÎncă nu există evaluări
- Qustion TestDocument3 paginiQustion Testprabhu4321Încă nu există evaluări
- FlywheelDocument4 paginiFlywheelMihai ConstantinescuÎncă nu există evaluări
- All-Test Pro, LLC: Atpol IiDocument3 paginiAll-Test Pro, LLC: Atpol IiMuhammad Tahir AbbasÎncă nu există evaluări
- Container Generator Qac Qec Leaflet EnglishDocument8 paginiContainer Generator Qac Qec Leaflet EnglishGem RÎncă nu există evaluări