S-ar putea să vă placă și
- Data TransmissionDocument2 paginiData TransmissionjakimlmÎncă nu există evaluări
- 02 Floater Switch Specpage 18Document28 pagini02 Floater Switch Specpage 18Kia GabriellaÎncă nu există evaluări
- Enderby 1990Document96 paginiEnderby 1990Fadjar MulyaÎncă nu există evaluări
- Project Report (Amie)Document28 paginiProject Report (Amie)Anonymous qID2bA60% (5)
- ASHIDA Corporate BrochureDocument5 paginiASHIDA Corporate Brochurerahulyadav2121545Încă nu există evaluări
- Swinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)Document24 paginiSwinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)pragatinareshÎncă nu există evaluări
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringDocument42 paginiBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooÎncă nu există evaluări
- 2.back To Back Test On Two Similar TransformersDocument5 pagini2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- O.C & S.C Test On Single Phase Transformer.: Siddhartha Institute of Engineering & TechnologyDocument6 paginiO.C & S.C Test On Single Phase Transformer.: Siddhartha Institute of Engineering & Technologyal imranÎncă nu există evaluări
- Beee Lab ManualDocument36 paginiBeee Lab ManualChanduVarmaKalidindiÎncă nu există evaluări
- Electrical Machine-1 Manual PDFDocument40 paginiElectrical Machine-1 Manual PDFsoumencha80% (5)
- EE-452 Power System Analysis Mannual 2013Document44 paginiEE-452 Power System Analysis Mannual 2013Alluri Appa RaoÎncă nu există evaluări
- Electric Machines LaboratoryDocument44 paginiElectric Machines Laboratory11mustafa.mÎncă nu există evaluări
- EE-452 - Power System Analysis - 2011Document44 paginiEE-452 - Power System Analysis - 2011eaf1Încă nu există evaluări
- 1.O.C. & S.C. Tests On Single Phase TransformerDocument6 pagini1.O.C. & S.C. Tests On Single Phase Transformerchandrakanth100% (3)
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Document7 paginiExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghÎncă nu există evaluări
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryDocument7 paginiExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriÎncă nu există evaluări
- AC Machines Lab Manual PDFDocument91 paginiAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document31 paginiParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanÎncă nu există evaluări
- Em Lab-II ManualDocument45 paginiEm Lab-II Manualrkadiraj701150% (4)
- 3 ExperimentsDocument100 pagini3 ExperimentsSaravanan T YÎncă nu există evaluări
- Advance Electrical Machine Manual 1-12Document48 paginiAdvance Electrical Machine Manual 1-12saqlainÎncă nu există evaluări
- 2 Wattmeter MethodDocument8 pagini2 Wattmeter Methodahg#0% (1)
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document18 paginiParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanÎncă nu există evaluări
- Machine Lab Non ElectricalDocument16 paginiMachine Lab Non ElectricalAbhishek MishraÎncă nu există evaluări
- Exp5. VTDocument10 paginiExp5. VTMohammed Abu Al HaijaÎncă nu există evaluări
- Experiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Document10 paginiExperiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Akshit VSÎncă nu există evaluări
- Lab 1Document32 paginiLab 1Adhithyan KzhlmÎncă nu există evaluări
- Machine LabDocument7 paginiMachine LabNurjahan-Ara StudentÎncă nu există evaluări
- EE536 ManualDocument67 paginiEE536 Manualciraj123456Încă nu există evaluări
- Yog Patil - Expt. No. 3Document8 paginiYog Patil - Expt. No. 3Yog PatilÎncă nu există evaluări
- Ele Lab ManualDocument10 paginiEle Lab ManualMothxNinjaÎncă nu există evaluări
- Sumpner's TestDocument5 paginiSumpner's TestDina GaranÎncă nu există evaluări
- EET1016 Lab SheetDocument14 paginiEET1016 Lab SheetNatasha92Încă nu există evaluări
- 10eel58 Transformers and Induction Machines LaboratoryDocument32 pagini10eel58 Transformers and Induction Machines Laboratorysvinod s100% (2)
- Electrical Machines - Ii Lab Manual: Anurag College of EngineeringDocument82 paginiElectrical Machines - Ii Lab Manual: Anurag College of Engineeringshehryar khanÎncă nu există evaluări
- EML Manual (2019 2023)Document43 paginiEML Manual (2019 2023)Areeba NasirÎncă nu există evaluări
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 paginiSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyÎncă nu există evaluări
- Electrical Machines Lab-II ManualDocument41 paginiElectrical Machines Lab-II Manualsuresh270Încă nu există evaluări
- Electrical Machines Lab Manual (DC Machines and Transformer)Document34 paginiElectrical Machines Lab Manual (DC Machines and Transformer)AmulyaÎncă nu există evaluări
- Laboratory Manual: Hirasugar Institute of Technology, NidasoshiDocument67 paginiLaboratory Manual: Hirasugar Institute of Technology, NidasoshipriyaÎncă nu există evaluări
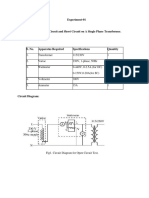
- Aim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDocument4 paginiAim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDevansh MankarÎncă nu există evaluări
- ENGR2200 Lab Manual Lab2Document12 paginiENGR2200 Lab Manual Lab2Sure TipsÎncă nu există evaluări
- Open Circuit and Short Circuit Test On Single Phase TransformerDocument5 paginiOpen Circuit and Short Circuit Test On Single Phase TransformerPratap SinghÎncă nu există evaluări
- Expt 6 EeeDocument9 paginiExpt 6 Eeezohair ahmedÎncă nu există evaluări
- Engineering Practice Lab ElectricalDocument23 paginiEngineering Practice Lab ElectricalKrishna Moorthy50% (2)
- 17eel37 Eml Lab ManualDocument64 pagini17eel37 Eml Lab ManualpriyaÎncă nu există evaluări
- Analog Electronic WattmetrDocument2 paginiAnalog Electronic WattmetrKaran AnejaÎncă nu există evaluări
- Basic Electrical Engineering Lab ManualDocument34 paginiBasic Electrical Engineering Lab ManualAmulyaÎncă nu există evaluări
- EE Lab ManualDocument23 paginiEE Lab ManualMoordhan SongadeÎncă nu există evaluări
- Exp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerDocument7 paginiExp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerSumit KatreÎncă nu există evaluări
- O.C & S.C of Single Phase TransformerDocument8 paginiO.C & S.C of Single Phase Transformerkudupudinagesh50% (2)
- Electrial Machines Third ReportDocument8 paginiElectrial Machines Third ReportMohamed YahiaÎncă nu există evaluări
- ETlab Manual 2Document16 paginiETlab Manual 2jyoti maheshÎncă nu există evaluări
- Electroagnetics 2 Lab ReportDocument8 paginiElectroagnetics 2 Lab ReportJoshuaÎncă nu există evaluări
- BeeeDocument66 paginiBeeejaydeep gudetiÎncă nu există evaluări
- Lecture6 Transformer PDFDocument50 paginiLecture6 Transformer PDFAhmad Akram100% (1)
- Electrical Machines-II Lab ManualDocument52 paginiElectrical Machines-II Lab Manualsai100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Employability Skills: Brush up Your ElectronicsDe la EverandEmployability Skills: Brush up Your ElectronicsÎncă nu există evaluări
- Internal Quality Assurance Cell: Welcomes NAAC Peer TeamDocument29 paginiInternal Quality Assurance Cell: Welcomes NAAC Peer TeampragatinareshÎncă nu există evaluări
- 2-11 Course FileDocument74 pagini2-11 Course FilepragatinareshÎncă nu există evaluări
- Presentation For: National Assessment and Accreditation CouncilDocument75 paginiPresentation For: National Assessment and Accreditation CouncilpragatinareshÎncă nu există evaluări
- New Age International (P) LTD., Publishers: Subject and Semester Book Required EnrolmentDocument1 paginăNew Age International (P) LTD., Publishers: Subject and Semester Book Required EnrolmentpragatinareshÎncă nu există evaluări
- 01-Architecture & PlanningDocument29 pagini01-Architecture & PlanningpragatinareshÎncă nu există evaluări
- Ps 9Document3 paginiPs 9pragatinareshÎncă nu există evaluări
- Pragati Engineering College: 1-378, Adb Road, Surampalem, Near Peddapuram, E.G.Dt, A.PDocument2 paginiPragati Engineering College: 1-378, Adb Road, Surampalem, Near Peddapuram, E.G.Dt, A.PpragatinareshÎncă nu există evaluări
- Ps 10Document5 paginiPs 10pragatinareshÎncă nu există evaluări
- Ps 8Document3 paginiPs 8pragatinareshÎncă nu există evaluări
- SOUL Installation: Universities/Institutions and Colleges - State-Wise Sr. NoDocument2 paginiSOUL Installation: Universities/Institutions and Colleges - State-Wise Sr. NopragatinareshÎncă nu există evaluări
- Ps 7Document3 paginiPs 7pragatinareshÎncă nu există evaluări
- 9th PRC Commission - Go - Ms.no52 Dt.25!02!2010Document1.012 pagini9th PRC Commission - Go - Ms.no52 Dt.25!02!2010emmreddyÎncă nu există evaluări
- Trainandoutput PatternsDocument2 paginiTrainandoutput PatternspragatinareshÎncă nu există evaluări
- NAAC SSR of The VRSEC1 PDFDocument492 paginiNAAC SSR of The VRSEC1 PDFanil_049100% (1)
- TCSC For Protection PDFDocument9 paginiTCSC For Protection PDFpragatinareshÎncă nu există evaluări
- Piohr, We Compute The Derivative Piobr Piobe. Thus Pinbe Piobc PP-'iodqDocument34 paginiPiohr, We Compute The Derivative Piobr Piobe. Thus Pinbe Piobc PP-'iodqpragatinareshÎncă nu există evaluări
- Final Ece-Sar (30.05.2013)Document200 paginiFinal Ece-Sar (30.05.2013)pragatinareshÎncă nu există evaluări
- Final EceDocument156 paginiFinal EcepragatinareshÎncă nu există evaluări
- Date: 17.05.2013 Notice: To The Managements of Private Un-Aided Professional Colleges / InstitutionsDocument1 paginăDate: 17.05.2013 Notice: To The Managements of Private Un-Aided Professional Colleges / InstitutionspragatinareshÎncă nu există evaluări
- Application of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysisDocument4 paginiApplication of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysispragatinareshÎncă nu există evaluări
- Ppt2 (Compatibility Mode)Document37 paginiPpt2 (Compatibility Mode)pragatinareshÎncă nu există evaluări
- A Comprehensive Survey For Optimal Location and Coordinated Control Techniques For FACTS Controllers in Power System Environments and ApplicationsDocument7 paginiA Comprehensive Survey For Optimal Location and Coordinated Control Techniques For FACTS Controllers in Power System Environments and ApplicationspragatinareshÎncă nu există evaluări
- Modern Control TheoryDocument137 paginiModern Control TheorypragatinareshÎncă nu există evaluări
- Expression of Interest For State Energy Conservation Awards 2013Document1 paginăExpression of Interest For State Energy Conservation Awards 2013pragatinareshÎncă nu există evaluări
- CG-428 - 06 TransistorsDocument17 paginiCG-428 - 06 TransistorsMark ClementsÎncă nu există evaluări
- AM2837 V0.3 EngDocument9 paginiAM2837 V0.3 Engjuanito35731057Încă nu există evaluări
- Active Hi-Fi LoudspeakersDocument17 paginiActive Hi-Fi LoudspeakersCarioquenhoÎncă nu există evaluări
- Sony hcd-gx355, gx555, rg270, rg475, rg575 Ver1.4 SMDocument126 paginiSony hcd-gx355, gx555, rg270, rg475, rg575 Ver1.4 SM00darkÎncă nu există evaluări
- Commscope CCVVPX308.11R - 2016Document3 paginiCommscope CCVVPX308.11R - 2016klamar5Încă nu există evaluări
- IIP2-improved Frontend Receiver Using A Mismatch Compensation LNADocument8 paginiIIP2-improved Frontend Receiver Using A Mismatch Compensation LNAwrite2arshad_mÎncă nu există evaluări
- BN5983Document4 paginiBN5983iyilmaz1Încă nu există evaluări
- Normal Power DistributionDocument3 paginiNormal Power DistributionAkshay NadagoudaÎncă nu există evaluări
- Chapter 7Document69 paginiChapter 7Amit DostÎncă nu există evaluări
- LG Flatron L1752 L1952 (SM)Document34 paginiLG Flatron L1752 L1952 (SM)José Edson Silva BezerraÎncă nu există evaluări
- Speed Control IM (Edited)Document37 paginiSpeed Control IM (Edited)مصطفى حمدىÎncă nu există evaluări
- AVLIS Final MergeDocument454 paginiAVLIS Final MergeSrinu BoddulaÎncă nu există evaluări
- Measurement Techniques in The E-Meter LibraryDocument7 paginiMeasurement Techniques in The E-Meter LibraryNehaoua FaresÎncă nu există evaluări
- Anachip 18CV8P 25 DatasheetDocument11 paginiAnachip 18CV8P 25 DatasheetMarcelo PerezÎncă nu există evaluări
- QRP SuperRM Assembly ManualDocument26 paginiQRP SuperRM Assembly ManualBenjamin DoverÎncă nu există evaluări
- Marshall Class 5 Owner ManualDocument4 paginiMarshall Class 5 Owner ManualJuan Cruz LeónÎncă nu există evaluări
- C3198 EliteDocument1 paginăC3198 Eliteshahbaz ahmadÎncă nu există evaluări
- C 677798-l 1-k ElectricpowerengineeringDocument61 paginiC 677798-l 1-k Electricpowerengineeringnatnael mentesnotÎncă nu există evaluări
- High Voltage Devices For Standard Mos Technologies - Characterisation and ModellingDocument5 paginiHigh Voltage Devices For Standard Mos Technologies - Characterisation and ModellingAnouarÎncă nu există evaluări
- PHD Thesis JD - CR - GS - FinalDocument185 paginiPHD Thesis JD - CR - GS - FinalmvillabrÎncă nu există evaluări
- MV Panel DiemensionsDocument32 paginiMV Panel DiemensionsM Umar ChatthaÎncă nu există evaluări
- Electrical Safety PDFDocument16 paginiElectrical Safety PDFARPITA KUMARIÎncă nu există evaluări
- Glofa Master-K: User 'S ManualDocument71 paginiGlofa Master-K: User 'S Manualhass100% (1)
- Quicktronic Professional Optimal: Product Family DatasheetDocument9 paginiQuicktronic Professional Optimal: Product Family DatasheetSakahi SharmaÎncă nu există evaluări
- +12V, 30ma Flash Memory Programming Supply: Evaluation Kit Manual Follows Data SheetDocument6 pagini+12V, 30ma Flash Memory Programming Supply: Evaluation Kit Manual Follows Data SheetJuan Carlos TellezÎncă nu există evaluări