S-ar putea să vă placă și
- Cosserat ForestDocument20 paginiCosserat ForestRodrigo Peluci de FigueiredoÎncă nu există evaluări
- Damage 99Document29 paginiDamage 99ing_costeroÎncă nu există evaluări
- Materials & Properties: Mechanical Behaviour: C. GarionDocument19 paginiMaterials & Properties: Mechanical Behaviour: C. GarionJosePeterPintoÎncă nu există evaluări
- 1 s2.0 S0045794905000805 Main PDFDocument10 pagini1 s2.0 S0045794905000805 Main PDFCandra ColivinnÎncă nu există evaluări
- Contact MechanicsDocument8 paginiContact MechanicsSom JaÎncă nu există evaluări
- Barsoum 1970Document18 paginiBarsoum 1970Doan Nguyen VanÎncă nu există evaluări
- 1 - What Are The Elastic Constants ?Document27 pagini1 - What Are The Elastic Constants ?Aliaa ELshabsheryÎncă nu există evaluări
- Elasticity 1Document32 paginiElasticity 1Sesha Sai KumarÎncă nu există evaluări
- Computational Physics Department Sandia National Laboratories Albuquerque, New Mexico 87185-0820, USA Math Group Boeing Phantom Works Seattle, Washington 98124-2207, USADocument9 paginiComputational Physics Department Sandia National Laboratories Albuquerque, New Mexico 87185-0820, USA Math Group Boeing Phantom Works Seattle, Washington 98124-2207, USAPra SuryaÎncă nu există evaluări
- Modeling of Large Deformations of Hyperelastic MaterialsDocument4 paginiModeling of Large Deformations of Hyperelastic MaterialsSEP-PublisherÎncă nu există evaluări
- Elasticity: Material PropertiesDocument37 paginiElasticity: Material PropertiesAmeen ShahidÎncă nu există evaluări
- 430 PDFDocument33 pagini430 PDFPeterÎncă nu există evaluări
- Das Acharya Ramola 2021Document9 paginiDas Acharya Ramola 2021Kabir RamolaÎncă nu există evaluări
- Solid MechanicsDocument12 paginiSolid MechanicsÅñírbāñ SārkârÎncă nu există evaluări
- Lemaitre (1984) - Coupled Elasto-Plasticity and Damage Constitutive Equations PDFDocument19 paginiLemaitre (1984) - Coupled Elasto-Plasticity and Damage Constitutive Equations PDFSalvatore MirandaÎncă nu există evaluări
- A Two-Scale Damage Model With Material Length: Cristian DascaluDocument8 paginiA Two-Scale Damage Model With Material Length: Cristian DascaluyycÎncă nu există evaluări
- Complex Engineering Problem: Stress AnalysisDocument17 paginiComplex Engineering Problem: Stress AnalysisIMRAN KHANÎncă nu există evaluări
- Modeling and Random Vibration Analysis of Sdof Systems With Asymmetric HysteresisDocument12 paginiModeling and Random Vibration Analysis of Sdof Systems With Asymmetric Hysteresisutsav_koshtiÎncă nu există evaluări
- J-Integral Approach For E-P Material Behaviour - AnsysDocument10 paginiJ-Integral Approach For E-P Material Behaviour - AnsysAbid HasanÎncă nu există evaluări
- Finite Element With No FORTRANDocument84 paginiFinite Element With No FORTRANNora MostafaÎncă nu există evaluări
- Metamaterial Negative MassDocument41 paginiMetamaterial Negative MassEmanuel CruvinelÎncă nu există evaluări
- Finite Strain - Isotropic HyperelasticityDocument26 paginiFinite Strain - Isotropic HyperelasticityvilukÎncă nu există evaluări
- An Investigation of The Self-Loosening Behavior of Bolts Under Transverse VibrationDocument21 paginiAn Investigation of The Self-Loosening Behavior of Bolts Under Transverse VibrationAhmed GalalÎncă nu există evaluări
- Viscoelastic Behaviour of Polymers PDFDocument120 paginiViscoelastic Behaviour of Polymers PDFSivasankar JeyabaskaranÎncă nu există evaluări
- Contact MechanicsDocument8 paginiContact MechanicsPourya NouryÎncă nu există evaluări
- Elastic and Strength Properties of Metal Rubber MaDocument7 paginiElastic and Strength Properties of Metal Rubber MaMohamed ElgendyÎncă nu există evaluări
- Classic Dynamic Fracture Recovered As The Limit of A Nonlocal Peridynamic Model: The Single Edge Notch in TensionDocument40 paginiClassic Dynamic Fracture Recovered As The Limit of A Nonlocal Peridynamic Model: The Single Edge Notch in TensionGaston GBÎncă nu există evaluări
- Elastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainDocument7 paginiElastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainNawar TahaÎncă nu există evaluări
- Peridynamics: Peridynamics Is A Formulation ofDocument7 paginiPeridynamics: Peridynamics Is A Formulation ofimechanicaÎncă nu există evaluări
- Relationship of StiffnessDocument6 paginiRelationship of Stiffnesslaneeth nambisanÎncă nu există evaluări
- Orthopaedic Biomechanics J. Michael Kabo, PHDDocument12 paginiOrthopaedic Biomechanics J. Michael Kabo, PHDJimÎncă nu există evaluări
- Young's Modulus, Hooke's Law and Material Properties. From PhysclipsDocument5 paginiYoung's Modulus, Hooke's Law and Material Properties. From PhysclipsAvik MondalÎncă nu există evaluări
- Nonlinear Elasticity of Granular Media: A. N. NorrisDocument11 paginiNonlinear Elasticity of Granular Media: A. N. NorrisCesar HernandezÎncă nu există evaluări
- Wagner, Holian, Massively Parallel Molecular Dynamics Simulations of Two-Dimensional Materials at High Strain RatesDocument6 paginiWagner, Holian, Massively Parallel Molecular Dynamics Simulations of Two-Dimensional Materials at High Strain RatesBishwajyoti DuttaMajumdarÎncă nu există evaluări
- Constitutive Models For Compressible Nonlinearly Elastic Materials With Limiting Chain ExtensibilityDocument16 paginiConstitutive Models For Compressible Nonlinearly Elastic Materials With Limiting Chain Extensibility2007rlwjdtnÎncă nu există evaluări
- FUS ENG DES39-759 1998 ABDOU MechBehav PBDocument6 paginiFUS ENG DES39-759 1998 ABDOU MechBehav PBmzram22Încă nu există evaluări
- Analysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsDocument13 paginiAnalysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsAJER JOURNALÎncă nu există evaluări
- PDLAMMPS - Made Easy: 1 Peridynamic Theory of SolidsDocument8 paginiPDLAMMPS - Made Easy: 1 Peridynamic Theory of SolidsSaeed AbdÎncă nu există evaluări
- Von Mises CriterionDocument8 paginiVon Mises CriteriondamnagedÎncă nu există evaluări
- Closed-Form Solutions For Elastoplastic Pure Bending of A Curved Beam With Material InhomogeneityDocument11 paginiClosed-Form Solutions For Elastoplastic Pure Bending of A Curved Beam With Material Inhomogeneityडॉ. कनिष्क शर्माÎncă nu există evaluări
- Class 11 Physics Notes Chapter 7 Studyguide360Document55 paginiClass 11 Physics Notes Chapter 7 Studyguide360Astrid RedÎncă nu există evaluări
- Saint VenantDocument10 paginiSaint Venantsk8_cartuchoÎncă nu există evaluări
- Silling AskariDocument10 paginiSilling AskaritdenizÎncă nu există evaluări
- A. M. Samsonov, G. V. Dreiden, A. V. Porubov, I. V. Semenova and E. V. Sokurinskaya - Theory and Observation of Strain Solitons in SolidsDocument6 paginiA. M. Samsonov, G. V. Dreiden, A. V. Porubov, I. V. Semenova and E. V. Sokurinskaya - Theory and Observation of Strain Solitons in SolidsldkgfdÎncă nu există evaluări
- Flat Slab by FemDocument8 paginiFlat Slab by Femanuj kumarÎncă nu există evaluări
- Chapitre 2 Mécanique Linéaire de La Rupture (1) .FR - enDocument11 paginiChapitre 2 Mécanique Linéaire de La Rupture (1) .FR - enKith MhakaÎncă nu există evaluări
- Mechanical Properties of Solids and Mechanical Properties of FluidsDocument19 paginiMechanical Properties of Solids and Mechanical Properties of FluidsSasidaran SasiÎncă nu există evaluări
- Deformation PDFDocument66 paginiDeformation PDFRicardo ColosimoÎncă nu există evaluări
- Writing A UMAT - 0Document18 paginiWriting A UMAT - 0Noushad Bin Jamal Structural EngineerÎncă nu există evaluări
- Dynamical Modelling of Fracture PropagationDocument4 paginiDynamical Modelling of Fracture PropagationAvalos DavidÎncă nu există evaluări
- The Effect of Weight On Bit On The Contact Behavior of Drill String and WellboreDocument7 paginiThe Effect of Weight On Bit On The Contact Behavior of Drill String and Wellboreansoe21Încă nu există evaluări
- Transversely Isotropic Plasticity With Application To Fiber - Reinforced PlasticsDocument20 paginiTransversely Isotropic Plasticity With Application To Fiber - Reinforced Plasticsshossain1987Încă nu există evaluări
- A Stochastically Homogenized Peridynamic Model For Intraply Fracture in Fiber-Reinforced CompositesDocument31 paginiA Stochastically Homogenized Peridynamic Model For Intraply Fracture in Fiber-Reinforced CompositesSubayyal IlyasÎncă nu există evaluări
- 18ECE302T-U2-L12 Stress and Strain - Tensile Stress and Strain, Definition, RelationshipsDocument14 pagini18ECE302T-U2-L12 Stress and Strain - Tensile Stress and Strain, Definition, Relationshipsamitava2010Încă nu există evaluări
- Couple Stress Based Strain Gradient Theory For Elasticity - Yang, Chong, Lam, Tong - 2002, 13sDocument13 paginiCouple Stress Based Strain Gradient Theory For Elasticity - Yang, Chong, Lam, Tong - 2002, 13sSevim GüçlüÎncă nu există evaluări
- Embedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannDocument22 paginiEmbedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannRubén Darío RodariÎncă nu există evaluări
- Analysis of Composite Laminate Beams Using Coupling Cross-Section Finite Element MethodDocument10 paginiAnalysis of Composite Laminate Beams Using Coupling Cross-Section Finite Element MethodHossam T BadranÎncă nu există evaluări
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6De la EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6Încă nu există evaluări
- Seminar on Micro-Local Analysis. (AM-93), Volume 93De la EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Încă nu există evaluări
- Fundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityDocument76 paginiFundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityutkarshÎncă nu există evaluări
- Calendar of Cases (May 3, 2018)Document4 paginiCalendar of Cases (May 3, 2018)Roy BacaniÎncă nu există evaluări
- Work Teams and GroupsDocument6 paginiWork Teams and GroupsFides AvendanÎncă nu există evaluări
- 2018080, CRPC Research PaperDocument23 pagini2018080, CRPC Research Paperguru charanÎncă nu există evaluări
- 38 Bayan Muna Vs MendozaDocument3 pagini38 Bayan Muna Vs MendozaDavid Antonio A. EscuetaÎncă nu există evaluări
- DND Homebrew Ideas V1 - The HomebreweryDocument3 paginiDND Homebrew Ideas V1 - The HomebreweryKalazans CardialÎncă nu există evaluări
- In Mein KampfDocument3 paginiIn Mein KampfAnonymous t5XUqBÎncă nu există evaluări
- Process of CounsellingDocument15 paginiProcess of CounsellingSamuel Njenga100% (1)
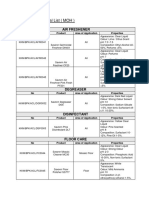
- Approved Chemical ListDocument2 paginiApproved Chemical ListSyed Mansur Alyahya100% (1)
- Espinosa - 2016 - Martín Ramírez at The Menil CollectionDocument3 paginiEspinosa - 2016 - Martín Ramírez at The Menil CollectionVíctor M. EspinosaÎncă nu există evaluări
- Essay EnglishDocument4 paginiEssay Englishkiera.kassellÎncă nu există evaluări
- Introduction To ICT EthicsDocument8 paginiIntroduction To ICT EthicsJohn Niño FilipinoÎncă nu există evaluări
- Old San Agustin NHS MSISAR Sept 2021Document2 paginiOld San Agustin NHS MSISAR Sept 2021ERICSON SABANGANÎncă nu există evaluări
- A Study of Consumer Behavior in Real Estate Sector: Inderpreet SinghDocument17 paginiA Study of Consumer Behavior in Real Estate Sector: Inderpreet SinghMahesh KhadeÎncă nu există evaluări
- Theater 10 Syllabus Printed PDFDocument7 paginiTheater 10 Syllabus Printed PDFJim QuentinÎncă nu există evaluări
- KAHOOT - Assignment 4.1 Lesson PlanDocument3 paginiKAHOOT - Assignment 4.1 Lesson PlanJan ZimmermannÎncă nu există evaluări
- SHS11Q4DLP 21st CentFinalDocument33 paginiSHS11Q4DLP 21st CentFinalNOEMI DE CASTROÎncă nu există evaluări
- Catastrophe Claims Guide 2007Document163 paginiCatastrophe Claims Guide 2007cottchen6605100% (1)
- Viva QuestionsDocument3 paginiViva QuestionssanjayshekarncÎncă nu există evaluări
- Challenges For Omnichannel StoreDocument5 paginiChallenges For Omnichannel StoreAnjali SrivastvaÎncă nu există evaluări
- NCPDocument3 paginiNCPchesca_paunganÎncă nu există evaluări
- Lorraln - Corson, Solutions Manual For Electromagnetism - Principles and Applications PDFDocument93 paginiLorraln - Corson, Solutions Manual For Electromagnetism - Principles and Applications PDFc. sorasÎncă nu există evaluări
- Bakhtin's Chronotope On The RoadDocument17 paginiBakhtin's Chronotope On The RoadLeandro OliveiraÎncă nu există evaluări
- Nature, and The Human Spirit: A Collection of QuotationsDocument2 paginiNature, and The Human Spirit: A Collection of QuotationsAxl AlfonsoÎncă nu există evaluări
- Indg 264.3 w02Document15 paginiIndg 264.3 w02FrauÎncă nu există evaluări
- Approach To Vaginal Discharge in ChildrenDocument12 paginiApproach To Vaginal Discharge in ChildrensujataÎncă nu există evaluări
- Finding The NTH Term of An Arithmetic SequenceDocument3 paginiFinding The NTH Term of An Arithmetic SequenceArdy PatawaranÎncă nu există evaluări
- (Dan Stone) The Historiography of The HolocaustDocument586 pagini(Dan Stone) The Historiography of The HolocaustPop Catalin100% (1)
- The Preparedness of The Data Center College of The Philippines To The Flexible Learning Amidst Covid-19 PandemicDocument16 paginiThe Preparedness of The Data Center College of The Philippines To The Flexible Learning Amidst Covid-19 PandemicInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- 2023-Tutorial 02Document6 pagini2023-Tutorial 02chyhyhyÎncă nu există evaluări