S-ar putea să vă placă și
- UKOOA FPSO Design Guidance NotesDocument176 paginiUKOOA FPSO Design Guidance Notesnazwan14100% (5)
- Jack-Up Rigs Operational Aspects (Offshore Drilling)Document22 paginiJack-Up Rigs Operational Aspects (Offshore Drilling)myusuf_engineer100% (8)
- Technical Reference 2007 CompleteDocument782 paginiTechnical Reference 2007 CompleteIvan GradÎncă nu există evaluări
- Jack Up Rigs Operational Aspects Offshore DrillingDocument22 paginiJack Up Rigs Operational Aspects Offshore Drillinganang WahjudiÎncă nu există evaluări
- Rolling of ShipsDocument37 paginiRolling of ShipsMark Antolino75% (8)
- Effects of Tide and Wind in Ship HandlingDocument19 paginiEffects of Tide and Wind in Ship Handlingpolaris25100% (8)
- Anchoring N Ship Handel IngDocument19 paginiAnchoring N Ship Handel IngRishav Raj0% (1)
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningDe la EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningEvaluare: 3.5 din 5 stele3.5/5 (2)
- Pivot PointDocument26 paginiPivot PointJet RocetÎncă nu există evaluări
- Turning Circles and Stopping DistancesDocument7 paginiTurning Circles and Stopping DistancesBisrat100% (1)
- 11 SwathDocument16 pagini11 SwathGSÎncă nu există evaluări
- Mcnichols Master CatalogDocument56 paginiMcnichols Master CatalogULISES MONTANOÎncă nu există evaluări
- Drillship Hull Structure Design and AnalysisDocument214 paginiDrillship Hull Structure Design and AnalysisBinh PhamÎncă nu există evaluări
- CP 1 - PPT 2 - Manoeuvring CharacteristicsDocument28 paginiCP 1 - PPT 2 - Manoeuvring CharacteristicsAjay KumarÎncă nu există evaluări
- Ctec CatalogDocument51 paginiCtec CatalogFAISHAH ISAHAKÎncă nu există evaluări
- QFD PresentationDocument75 paginiQFD PresentationBhushan Verma100% (3)
- Turning Circle NotesDocument6 paginiTurning Circle Notesss_tayadeÎncă nu există evaluări
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Document19 paginiThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis MouzenidisÎncă nu există evaluări
- Understanding Different Types of Manoeuvres of A VesselDocument9 paginiUnderstanding Different Types of Manoeuvres of A VesselGiorgi Kandelaki100% (1)
- Dynamic Positioning SimulatorDocument79 paginiDynamic Positioning Simulatortm5u2r100% (3)
- Staad Pro TutorialsDocument17 paginiStaad Pro Tutorialsrandhir981Încă nu există evaluări
- 1.1 Ship Manoeuvring - Approach Pilot - Q&ADocument14 pagini1.1 Ship Manoeuvring - Approach Pilot - Q&Avishnu k100% (5)
- 04) ZEEPod & Other Project ExperienceDocument72 pagini04) ZEEPod & Other Project Experiencebapaobao100% (1)
- MooringDocument38 paginiMooringBinh Pham100% (1)
- Sten A Voyager ReportDocument45 paginiSten A Voyager ReportBinh PhamÎncă nu există evaluări
- Performance Boat TermsDocument6 paginiPerformance Boat TermsParamaet TamÎncă nu există evaluări
- API Deepwater Standards PosterDocument1 paginăAPI Deepwater Standards PosterBoonme ChinnaboonÎncă nu există evaluări
- Collission RickmersDubaiDocument88 paginiCollission RickmersDubaiBinh Pham100% (1)
- Otc19607 About API RP 2skDocument12 paginiOtc19607 About API RP 2skBinh PhamÎncă nu există evaluări
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Document19 paginiThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis Mouzenidis100% (1)
- Rudders: Semi Balanced Rudder Semi Balanced Rudder With Rudder HornDocument10 paginiRudders: Semi Balanced Rudder Semi Balanced Rudder With Rudder Hornsunil1237Încă nu există evaluări
- ASD TugsDocument3 paginiASD TugsVaruna Shantha100% (1)
- Azimuthal PropellersDocument7 paginiAzimuthal PropellersElena Turcu0% (1)
- Skandi HerculesDocument9 paginiSkandi Herculesiw2fualÎncă nu există evaluări
- BS IEC 61882 - 2001 - Hazard and Operability StudiesDocument60 paginiBS IEC 61882 - 2001 - Hazard and Operability Studiesd-fbuser-230265495100% (2)
- Standardized Tractor Tug Commands For Ship-Assist WorkDocument5 paginiStandardized Tractor Tug Commands For Ship-Assist WorkPoyraz Rüzgar100% (1)
- Hoegh Osaka MAIB ReportDocument86 paginiHoegh Osaka MAIB ReportIWCPOnlineÎncă nu există evaluări
- Maruti Bba Project For MarketingDocument92 paginiMaruti Bba Project For Marketingkaushal244256% (9)
- Pivot Point & Stopping Distance and Turning CircleDocument30 paginiPivot Point & Stopping Distance and Turning Circleمرتضى جبار السودانيÎncă nu există evaluări
- Towing Solutions IncDocument6 paginiTowing Solutions Incboca1966100% (1)
- 01a-3.3.2 - TugsDocument21 pagini01a-3.3.2 - TugsRajiv VigÎncă nu există evaluări
- Principles of Ship HandlingDocument10 paginiPrinciples of Ship HandlingGlen MacÎncă nu există evaluări
- Rudders: Semi Balanced RudderDocument10 paginiRudders: Semi Balanced RudderAurvin SinghÎncă nu există evaluări
- Quantum XT Stabilising SystemDocument18 paginiQuantum XT Stabilising Systemmariusamd100% (1)
- Marius Jonutis Quantum XT Stabilising SystemDocument18 paginiMarius Jonutis Quantum XT Stabilising SystemmariusamdÎncă nu există evaluări
- Type Stabilizer PDFDocument7 paginiType Stabilizer PDFHUNG NIKKOÎncă nu există evaluări
- Understanding Turning Circle of A ShipDocument3 paginiUnderstanding Turning Circle of A Shipandrew1970gÎncă nu există evaluări
- SeakeepingDocument5 paginiSeakeepingPallavi YempadaÎncă nu există evaluări
- StabilizerDocument46 paginiStabilizerlana ska100% (1)
- Stabilising SystemsDocument4 paginiStabilising Systemsshafwan1980Încă nu există evaluări
- Stabilising Systems: Bilge KeelsDocument5 paginiStabilising Systems: Bilge KeelsS SanchitÎncă nu există evaluări
- Anti-Heeling With Simulaneous Roll-Reduction - RRMDocument2 paginiAnti-Heeling With Simulaneous Roll-Reduction - RRMYao WeiÎncă nu există evaluări
- Anti-Rolling DevicesDocument26 paginiAnti-Rolling DevicesSaurav SainiÎncă nu există evaluări
- Mech CEP - Abstract, Intro & MechanismsDocument4 paginiMech CEP - Abstract, Intro & MechanismsTolphasÎncă nu există evaluări
- Bow Thruster, Ship Stabilizer MGPSDocument13 paginiBow Thruster, Ship Stabilizer MGPSSayem kaifÎncă nu există evaluări
- Whitepaper-1402-How Gyrostabilizers Work PDFDocument32 paginiWhitepaper-1402-How Gyrostabilizers Work PDFdanieldorelleÎncă nu există evaluări
- Ship Stability at The Management LevelDocument4 paginiShip Stability at The Management LevelShree Kanha100% (1)
- T Foil RuddersDocument4 paginiT Foil RuddersSlavi72Încă nu există evaluări
- DW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselDocument42 paginiDW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselSHARATHÎncă nu există evaluări
- Basic Ship HandlingDocument1 paginăBasic Ship HandlingCostisÎncă nu există evaluări
- (Swath) : Small Waterplane Area Twin HullDocument64 pagini(Swath) : Small Waterplane Area Twin HullDin ThorpeÎncă nu există evaluări
- Escorting Ships With Tractor TugsDocument5 paginiEscorting Ships With Tractor TugsDiego Ramón Gonzalez-LlanosÎncă nu există evaluări
- High Speed MArine VehiclesDocument11 paginiHigh Speed MArine VehiclesAnonymous e3ceN15Încă nu există evaluări
- Ccfi Bulbs Anti Roll Devices PDFDocument2 paginiCcfi Bulbs Anti Roll Devices PDFtoshugoÎncă nu există evaluări
- 6 - Motion StabilizationDocument19 pagini6 - Motion StabilizationJofin LukoseÎncă nu există evaluări
- The Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsDocument32 paginiThe Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsPeter HinrichsenÎncă nu există evaluări
- Ship StabilityDocument5 paginiShip StabilityRachmat Hidayat SapwariÎncă nu există evaluări
- Dynamic Positioning c11Document60 paginiDynamic Positioning c11S DÎncă nu există evaluări
- Nama: Hasan Rohmani NRT: 20.11.21.033 Kelas: Nautika B English MaritimeDocument4 paginiNama: Hasan Rohmani NRT: 20.11.21.033 Kelas: Nautika B English Maritimehasanrohmani77Încă nu există evaluări
- HSC Machinery RequirementsDocument174 paginiHSC Machinery RequirementssasikumarmarineÎncă nu există evaluări
- TurningDocument8 paginiTurningFaizaan BadarÎncă nu există evaluări
- Different Ways To Reduce Ship Propeller Vibrations and Increase Its EfficiencyDocument14 paginiDifferent Ways To Reduce Ship Propeller Vibrations and Increase Its Efficiencynauval.archÎncă nu există evaluări
- Model Solar Boat HelpDocument38 paginiModel Solar Boat HelpAimanul HakimÎncă nu există evaluări
- Seam 5 Topic 1 Principles of Ship HandlingDocument16 paginiSeam 5 Topic 1 Principles of Ship Handlingbryan.negriteÎncă nu există evaluări
- Natural Stability and the Parachute Principle in AeroplanesDe la EverandNatural Stability and the Parachute Principle in AeroplanesÎncă nu există evaluări
- Understanding Mooring IncideDocument8 paginiUnderstanding Mooring IncideIan MaldonadoÎncă nu există evaluări
- Failure CPP - Key BoraDocument12 paginiFailure CPP - Key BoraBinh PhamÎncă nu există evaluări
- STRIKING of OSV Maersk DetectorDocument45 paginiSTRIKING of OSV Maersk DetectorBinh PhamÎncă nu există evaluări
- UnderstandingMooringIncidents PDFDocument8 paginiUnderstandingMooringIncidents PDFBinh PhamÎncă nu există evaluări
- Technical Investigation Accident Twin Crane LiftDocument6 paginiTechnical Investigation Accident Twin Crane LiftBinh PhamÎncă nu există evaluări
- Add MassDocument9 paginiAdd MassjamesÎncă nu există evaluări
- MAIB - Collision Due To Anchor DragDocument16 paginiMAIB - Collision Due To Anchor DragBinh Pham100% (1)
- Chief Ton TugDocument69 paginiChief Ton TugBinh PhamÎncă nu există evaluări
- MAIB Report On MSC Napoli CasualtyDocument56 paginiMAIB Report On MSC Napoli CasualtyBinh PhamÎncă nu există evaluări
- Annabella ReportDocument40 paginiAnnabella ReportBinh PhamÎncă nu există evaluări
- Annabella ReportDocument40 paginiAnnabella ReportBinh PhamÎncă nu există evaluări
- Failure CPP - Key BoraDocument12 paginiFailure CPP - Key BoraBinh PhamÎncă nu există evaluări
- Dutch NavigatorDocument66 paginiDutch NavigatorBinh Pham100% (1)
- Tie-In Spool - A Verification Study (MSC)Document213 paginiTie-In Spool - A Verification Study (MSC)Binh PhamÎncă nu există evaluări
- DP Class Notation: BV ABS GL LR NK Rina RS IRS CCS NMD KR DNVDocument1 paginăDP Class Notation: BV ABS GL LR NK Rina RS IRS CCS NMD KR DNVswapneel_kulkarniÎncă nu există evaluări
- Wave Drift Forces and Responses in Deep Water and Extreme Environmental ConditionsDocument4 paginiWave Drift Forces and Responses in Deep Water and Extreme Environmental Conditionssaeed-21Încă nu există evaluări
- 406 Lesson 9bDocument41 pagini406 Lesson 9bBinh PhamÎncă nu există evaluări
- 17.01 General HSE Induction EmployeesDocument4 pagini17.01 General HSE Induction EmployeesRetselisitsoeÎncă nu există evaluări
- MHPQ Pharm 35 Ayurvedic DrugsDocument104 paginiMHPQ Pharm 35 Ayurvedic DrugsDurban Chamber of Commerce and IndustryÎncă nu există evaluări
- Line History SheetDocument4 paginiLine History SheetBethel NdifonÎncă nu există evaluări
- Irshad Ansari: Al Raha Village Mafraq Abu Dhabi UAEDocument2 paginiIrshad Ansari: Al Raha Village Mafraq Abu Dhabi UAEirshadÎncă nu există evaluări
- Ecc 5.0-Sap-Sd For CRMDocument2 paginiEcc 5.0-Sap-Sd For CRMsnd31Încă nu există evaluări
- CV Sekretaris PC Tidar Batam PDFDocument4 paginiCV Sekretaris PC Tidar Batam PDFGlobal Inovasi BersamaÎncă nu există evaluări
- 09574099710805556Document50 pagini09574099710805556heartback100% (2)
- User Guide TemplateDocument12 paginiUser Guide TemplateClass InstructorÎncă nu există evaluări
- Signals Spectra Processing PowerPoint PresentationDocument8 paginiSignals Spectra Processing PowerPoint PresentationJohn Francis DizonÎncă nu există evaluări
- RVT Column Internals EN WEB 20220809Document11 paginiRVT Column Internals EN WEB 20220809Göksel VATANÎncă nu există evaluări
- Builders Hardware Manufacturers Association (BHMA) : Code Finish Description Base Material Category Nearest US EquivDocument5 paginiBuilders Hardware Manufacturers Association (BHMA) : Code Finish Description Base Material Category Nearest US EquivRey Eduard Q. UmelÎncă nu există evaluări
- Quick Fields 8Document11 paginiQuick Fields 8Khaled ElayyanÎncă nu există evaluări
- Draft Curriculum Telecommunication EngineeringDocument85 paginiDraft Curriculum Telecommunication EngineeringalareeqiÎncă nu există evaluări
- R & S Gratings CatalogueDocument48 paginiR & S Gratings CatalogueBarrasons Engineers TeamÎncă nu există evaluări
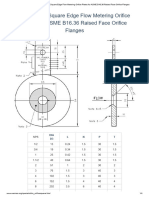
- Wermac - Dimensions of Square Edge Flow Metering Orifice Plates For ASME B16.36 Raised Face Orifice FlangesDocument4 paginiWermac - Dimensions of Square Edge Flow Metering Orifice Plates For ASME B16.36 Raised Face Orifice Flangestechnicalei sulfindoÎncă nu există evaluări
- Mj19 Sample Apm QuestionsDocument9 paginiMj19 Sample Apm QuestionsAakash AadeezÎncă nu există evaluări
- Vishnu Dutt PMDocument2 paginiVishnu Dutt PMvishnu choudharyÎncă nu există evaluări
- Conference Delegate Wish ListDocument55 paginiConference Delegate Wish ListThinkLink, Foreign Affairs www.thinklk.comÎncă nu există evaluări
- Export PDF Form Data To Microsoft AccessDocument2 paginiExport PDF Form Data To Microsoft AccessTamaraÎncă nu există evaluări
- Gables EngineeringDocument2 paginiGables EngineeringShamsuddin HasnaniÎncă nu există evaluări
- Project Chapter 2Document22 paginiProject Chapter 2N EÎncă nu există evaluări
- Emax DCDocument97 paginiEmax DCAhmad HamoudaÎncă nu există evaluări
- Tda1085c DDocument12 paginiTda1085c DpamururamuÎncă nu există evaluări
- CNC Roo:M: I Qumjtr AssuranceDocument2 paginiCNC Roo:M: I Qumjtr AssuranceSalvador TiñoÎncă nu există evaluări