S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Magnetic Field PracticalDocument17 paginiMagnetic Field PracticalAaditya PandeyÎncă nu există evaluări
- Spring Final Exam Study Guide 2022-2024Document11 paginiSpring Final Exam Study Guide 2022-2024nathan.pancratz41Încă nu există evaluări
- BTech Chemical Engineering Syllabus 2015 16 PDFDocument112 paginiBTech Chemical Engineering Syllabus 2015 16 PDFShaviz SoudagarÎncă nu există evaluări
- PMC Mock Test 3Document18 paginiPMC Mock Test 3Musharaf RehmanÎncă nu există evaluări
- PB165242 PG068 - PG106Document39 paginiPB165242 PG068 - PG106Cikgu Zul ZacherryÎncă nu există evaluări
- Hall Effect PresentationDocument11 paginiHall Effect PresentationLucian SupliJenÎncă nu există evaluări
- Biot and Savart - S LawDocument23 paginiBiot and Savart - S LawMuzammilÎncă nu există evaluări
- Magnetic FlowmetersDocument72 paginiMagnetic FlowmetersJuan Manuel EscorihuelaÎncă nu există evaluări
- Electric Motor PresentationDocument16 paginiElectric Motor PresentationBhupender Kumar MahurÎncă nu există evaluări
- Problems For Electromagnetic Theory TEE3201Document5 paginiProblems For Electromagnetic Theory TEE3201Taboka SialumbaÎncă nu există evaluări
- Chapter 4 MEMS Micro Sensors and ActuatorsDocument12 paginiChapter 4 MEMS Micro Sensors and ActuatorstcsÎncă nu există evaluări
- EM Waves QuestionsDocument15 paginiEM Waves Questionskaushik247Încă nu există evaluări
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 paginiCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicÎncă nu există evaluări
- 04 - Test - FinalDocument3 pagini04 - Test - FinalHarshitha KulkarniÎncă nu există evaluări
- Ee 4101Document183 paginiEe 4101Franz TabioloÎncă nu există evaluări
- Engineering Physics L-5: (Electromagnetic Theory) Quantum MechanicsDocument7 paginiEngineering Physics L-5: (Electromagnetic Theory) Quantum MechanicsVijay ReddyÎncă nu există evaluări
- Questions & Answers: Astronomy (IOQA)Document9 paginiQuestions & Answers: Astronomy (IOQA)Akshay TiwariÎncă nu există evaluări
- DC GeneratirDocument77 paginiDC GeneratirXun Wen CheokÎncă nu există evaluări
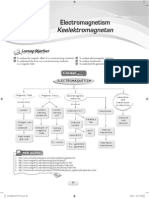
- ElectromagnetismDocument12 paginiElectromagnetismDavid ParfittÎncă nu există evaluări
- Magnetic Properties of MatterDocument8 paginiMagnetic Properties of MatterRobin SinghÎncă nu există evaluări
- Exact Solutions of The Klein-Gordon Equation in The Presence of A Dyon, Magnetic Flux and Scalar Potential in The Spacetime of Gravitational DefectsDocument16 paginiExact Solutions of The Klein-Gordon Equation in The Presence of A Dyon, Magnetic Flux and Scalar Potential in The Spacetime of Gravitational DefectsBilgehan Barış ÖNERÎncă nu există evaluări
- Worksheet of Electromagnetic InductionDocument2 paginiWorksheet of Electromagnetic InductionAmartya RajÎncă nu există evaluări
- Vibrations in Rotating Machinery (7th Int'l Conf.) (IME, 2000) WWDocument770 paginiVibrations in Rotating Machinery (7th Int'l Conf.) (IME, 2000) WWyounever12395% (20)
- Bedini - Free Energy Motor - Motor Diagrams and Lab Notes (1996)Document24 paginiBedini - Free Energy Motor - Motor Diagrams and Lab Notes (1996)turuc100% (2)
- MAI Specimen Papers 2021 - EnglishDocument138 paginiMAI Specimen Papers 2021 - EnglishNurul ArifahÎncă nu există evaluări
- Physics Xiith Class: Weekly Test (11) Total Marks: 100: Moving Charge and Magnetic FieldDocument3 paginiPhysics Xiith Class: Weekly Test (11) Total Marks: 100: Moving Charge and Magnetic FieldVinuben RajputÎncă nu există evaluări
- Magnetism AssignmentDocument3 paginiMagnetism AssignmentKartikey GautamÎncă nu există evaluări
- Adobe Scan 31 Jan 2023Document16 paginiAdobe Scan 31 Jan 2023Apn ApnÎncă nu există evaluări
- Course Description, CSE Dept, National University, BangladeshDocument30 paginiCourse Description, CSE Dept, National University, BangladeshPrashanth Kumar25% (8)
- Mutual and Self InductanceDocument53 paginiMutual and Self InductanceTrungpv PhamÎncă nu există evaluări