S-ar putea să vă placă și
- Cuadro Comparativo - Estructuras y OrganigramaDocument6 paginiCuadro Comparativo - Estructuras y OrganigramaYulieth Zuleta100% (1)
- Imco Sac TesisDocument246 paginiImco Sac TesisUmasi Carlos WilsonÎncă nu există evaluări
- 01 FO-TI-27 Formato Declaracion de Aplicabilidad V - 1.0 - Diligenciado Dic2015Document15 pagini01 FO-TI-27 Formato Declaracion de Aplicabilidad V - 1.0 - Diligenciado Dic2015Miguel AlfonsoÎncă nu există evaluări
- Caso Kristen Cookies ExcelDocument17 paginiCaso Kristen Cookies ExcelUmasi Carlos WilsonÎncă nu există evaluări
- Naturaleza de La EvidenciaDocument5 paginiNaturaleza de La EvidenciaAda BigvaiÎncă nu există evaluări
- Dossier Alcantara 1Document12 paginiDossier Alcantara 1Umasi Carlos WilsonÎncă nu există evaluări
- Caso Metallgesellschaft AGDocument10 paginiCaso Metallgesellschaft AGLaura Francisca Carril Cancino100% (1)
- Cuello de Botella - Carwash DaytonaDocument18 paginiCuello de Botella - Carwash DaytonaUmasi Carlos WilsonÎncă nu există evaluări
- Devolucion de Informacion en El Proceso PsicodiagnosticoDocument5 paginiDevolucion de Informacion en El Proceso PsicodiagnosticoCarlos Padilla Salgado100% (2)
- Microsoft Powerpoint - Caso Banco La SolucionDocument16 paginiMicrosoft Powerpoint - Caso Banco La SolucionUmasi Carlos Wilson100% (1)
- Plan de Trabajo Propuesto Por MyserDocument8 paginiPlan de Trabajo Propuesto Por MyserUmasi Carlos Wilson100% (1)
- Comunicacin Slabas InversasDocument5 paginiComunicacin Slabas InversasJIOSE100% (2)
- Analisis de La OfertaDocument2 paginiAnalisis de La OfertaUmasi Carlos WilsonÎncă nu există evaluări
- Cotizacion de Custer 28 Pasajeros Servosa 02 PDFDocument2 paginiCotizacion de Custer 28 Pasajeros Servosa 02 PDFUmasi Carlos WilsonÎncă nu există evaluări
- Toma de Decisiones Gerenciales Apuntes de ClasesDocument7 paginiToma de Decisiones Gerenciales Apuntes de ClasesUmasi Carlos WilsonÎncă nu există evaluări
- RP Líder de Control de Inventarios - Site-1Document3 paginiRP Líder de Control de Inventarios - Site-1Umasi Carlos WilsonÎncă nu există evaluări
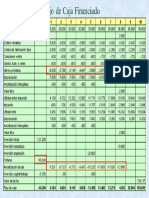
- Flujo+de+Caja PRACTICO+FinanciadoDocument1 paginăFlujo+de+Caja PRACTICO+FinanciadoUmasi Carlos WilsonÎncă nu există evaluări
- Cotizacion de Custer 28 Pasajeros Servosa 02Document2 paginiCotizacion de Custer 28 Pasajeros Servosa 02Umasi Carlos WilsonÎncă nu există evaluări
- Ejercicios Valuacion GF 2019Document2 paginiEjercicios Valuacion GF 2019Umasi Carlos WilsonÎncă nu există evaluări
- Ejercicios Estructura de Capital 2019Document2 paginiEjercicios Estructura de Capital 2019Umasi Carlos WilsonÎncă nu există evaluări
- Importancia de La TICS en La ContabilidadDocument5 paginiImportancia de La TICS en La ContabilidadIbett LopezÎncă nu există evaluări
- RAD 15 Servicios de Informaci N Aeron UticaDocument32 paginiRAD 15 Servicios de Informaci N Aeron UticaphillipdiazÎncă nu există evaluări
- PC Equipo7Document15 paginiPC Equipo7Ale MendezÎncă nu există evaluări
- Fundamentos de Economia Cap 10Document4 paginiFundamentos de Economia Cap 10Jhoan Ordoñez Muñoz100% (1)
- Nia 240Document6 paginiNia 240KENIA ALEJANDRA AGUILAR TOBARÎncă nu există evaluări
- Guia 2 - Lenguaje Grado 11 - 2021Document5 paginiGuia 2 - Lenguaje Grado 11 - 2021Lider OspinaÎncă nu există evaluări
- Informe Grupo 10Document11 paginiInforme Grupo 10Diana ChavezÎncă nu există evaluări
- José Miguel Valdivia - Lo Que Oculta La TransparenciaDocument10 paginiJosé Miguel Valdivia - Lo Que Oculta La TransparenciaFernandoÎncă nu există evaluări
- Preguntas - Psicologia EducativaDocument9 paginiPreguntas - Psicologia EducativaJossephsalmils OficialÎncă nu există evaluări
- Formas de Abordar La CorrupciónDocument17 paginiFormas de Abordar La CorrupciónSobeida MontillaÎncă nu există evaluări
- Gfpi-F-019 Guia de Aprendizaje Dibujo DigitalDocument10 paginiGfpi-F-019 Guia de Aprendizaje Dibujo DigitalMARIA ALEJANDRA VARGAS LEGROÎncă nu există evaluări
- Diac 2019-2020Document20 paginiDiac 2019-2020RONNTUFÎncă nu există evaluări
- Actividad 1 Procesos Cognitivos. Trabajo ColaborativoDocument4 paginiActividad 1 Procesos Cognitivos. Trabajo ColaborativoKarla ParraÎncă nu există evaluări
- Lectura La Maestra Recomienda A Sus Alumnos Que Se Pongan de Acuerdo Acerca de Qué Dice en Los Textos Que Se Les PresentanDocument15 paginiLectura La Maestra Recomienda A Sus Alumnos Que Se Pongan de Acuerdo Acerca de Qué Dice en Los Textos Que Se Les PresentanLucas VillagraÎncă nu există evaluări
- Trayectorias Laborales de Los Doctores en Ciencias e Ingenierías en ChileDocument615 paginiTrayectorias Laborales de Los Doctores en Ciencias e Ingenierías en ChileEnrique Adolfo Alvarez SotoÎncă nu există evaluări
- TRIPTICODocument2 paginiTRIPTICORemberto Gutierrez50% (2)
- El Espejo ContableDocument2 paginiEl Espejo ContableMayerly PallaresÎncă nu există evaluări
- Informe Primera Entrega 28 de Abril 2020Document2 paginiInforme Primera Entrega 28 de Abril 2020Jhon Sebastian LozanoÎncă nu există evaluări
- Activida 1 - MapaConceptualDocument6 paginiActivida 1 - MapaConceptualAlejandro MolanoÎncă nu există evaluări
- Ejemplo Plan LectorDocument26 paginiEjemplo Plan LectorEmmyta Romero HuarcaÎncă nu există evaluări
- PDF Adsi Contenido Programatico Sena DLDocument32 paginiPDF Adsi Contenido Programatico Sena DLJhoan Sanchez ChachinoyÎncă nu există evaluări
- IndicasDocument21 paginiIndicasnaomi monzalvoÎncă nu există evaluări
- Manual MiradorDocument13 paginiManual MiradorticomsaÎncă nu există evaluări
- Actividad 1 Tecnología de La InformaciónDocument5 paginiActividad 1 Tecnología de La InformaciónGABRIELÎncă nu există evaluări