S-ar putea să vă placă și
- Excavaciones y ZanjasDocument27 paginiExcavaciones y ZanjasHenry GarayÎncă nu există evaluări
- Comportamiento Sismico de Taludes: Camiper Consultancy & TrainingDocument48 paginiComportamiento Sismico de Taludes: Camiper Consultancy & TrainingHenry GarayÎncă nu există evaluări
- Ingenieria Geotecnica Aplicada Al Diseño de Excavaciones en Mineria SuperficialDocument45 paginiIngenieria Geotecnica Aplicada Al Diseño de Excavaciones en Mineria SuperficialHenry GarayÎncă nu există evaluări
- Capacidad de Carga Portante Del TerrenoDocument55 paginiCapacidad de Carga Portante Del TerrenoHenry GarayÎncă nu există evaluări
- Manual de Procedimiento para El Regidtro Geotecnico de Sondajes PDFDocument28 paginiManual de Procedimiento para El Regidtro Geotecnico de Sondajes PDFklerchch2013Încă nu există evaluări
- Modelo de Calculo de Rotura Semicircular en Material Con Poca Cohesion - Metodo Hoek Y BrayDocument80 paginiModelo de Calculo de Rotura Semicircular en Material Con Poca Cohesion - Metodo Hoek Y BrayHenry GarayÎncă nu există evaluări
- 2002 Parte1 2 PDFDocument242 pagini2002 Parte1 2 PDFFranz J. Balvin MontalvoÎncă nu există evaluări
- Porfidos Cupriferos - 29230Document12 paginiPorfidos Cupriferos - 29230quchufa100% (1)
- Prevencion de RiesgosDocument47 paginiPrevencion de RiesgosHenry GarayÎncă nu există evaluări
- Estratigrafia Analisis de Facies y PaleoDocument19 paginiEstratigrafia Analisis de Facies y PaleoHenry GarayÎncă nu există evaluări
- Clase 6-Correlaciones EstratigrficasDocument15 paginiClase 6-Correlaciones EstratigrficasCarlos Mossadek Torres CarvajalÎncă nu există evaluări
- Curso de ArcgisDocument24 paginiCurso de Arcgisesteban ortega flores100% (1)
- Modelamiento Geologico Implicito de AntaminaDocument34 paginiModelamiento Geologico Implicito de AntaminaMaycol García Laureano100% (1)
- Estudio Geologico de Ls Cuva Plaistocenica CelendinDocument13 paginiEstudio Geologico de Ls Cuva Plaistocenica CelendinHenry GarayÎncă nu există evaluări
- Depósitos Lacustres Terciarios PDFDocument24 paginiDepósitos Lacustres Terciarios PDFHenry GarayÎncă nu există evaluări
- 2 Estabilidad de Taludes GEO SLOPEDocument42 pagini2 Estabilidad de Taludes GEO SLOPEcesarperaltavidalÎncă nu există evaluări
- CORRELACIONES EN TODO EL TERRITORIO PERUANO y FÓSILES CARACTERISTICOSDocument10 paginiCORRELACIONES EN TODO EL TERRITORIO PERUANO y FÓSILES CARACTERISTICOSHenry GarayÎncă nu există evaluări
- PitDocument85 paginiPitHans Haro De la CruzÎncă nu există evaluări
- Resistencia Por Fuste en Terrenos GranularesDocument7 paginiResistencia Por Fuste en Terrenos GranularesHenry GarayÎncă nu există evaluări
- GeotermiaDocument5 paginiGeotermiaHenry GarayÎncă nu există evaluări
- Matriz 21 Parametros-ChontaDocument2 paginiMatriz 21 Parametros-ChontaHenry GarayÎncă nu există evaluări
- Plano Geológico - MRDocument1 paginăPlano Geológico - MRHenry GarayÎncă nu există evaluări
- Cap. V Rocas CarbonatadasDocument87 paginiCap. V Rocas CarbonatadasHenry GarayÎncă nu există evaluări
- 2da ExposicionDocument50 pagini2da ExposicionHenry GarayÎncă nu există evaluări
- Rinconada Tesis AmbientalDocument151 paginiRinconada Tesis Ambientalcarlos_albedrio_6664743100% (1)
- Curso de ArcgisDocument24 paginiCurso de Arcgisesteban ortega flores100% (1)
- Cap Ii.Document73 paginiCap Ii.Henry GarayÎncă nu există evaluări
- Petrologia, Ambientes y TectónicaDocument45 paginiPetrologia, Ambientes y TectónicaHenry GarayÎncă nu există evaluări
- 071 Rame Gustavo Alejandro - DesbloqueadoDocument6 pagini071 Rame Gustavo Alejandro - DesbloqueadoHenry GarayÎncă nu există evaluări
- 98 Robert Et Al BGSPeruDocument0 pagini98 Robert Et Al BGSPeruDuber Cáceres MalaverÎncă nu există evaluări
- Simbología Eléctrica y ElectrónicaDocument21 paginiSimbología Eléctrica y ElectrónicavickoÎncă nu există evaluări
- Trabajo de Gerencia de Operaciones-AvanceDocument16 paginiTrabajo de Gerencia de Operaciones-AvanceIvette HeránÎncă nu există evaluări
- Republica DominicanaDocument53 paginiRepublica DominicanaHugo Enrique Ramos Balanzar100% (2)
- Informe Frank HertzDocument7 paginiInforme Frank HertzCamilo Alejandro Rojas PachecoÎncă nu există evaluări
- Documento Tesis Rfid PDFDocument178 paginiDocumento Tesis Rfid PDFMargaritoPitiminiÎncă nu există evaluări
- Fritzel TRAMPAS Antena 10-15-20Document20 paginiFritzel TRAMPAS Antena 10-15-20Jacqueline BrownÎncă nu există evaluări
- Calculo Del Numero de Polos Del Motor de Induccion - AutomatizacionDocument7 paginiCalculo Del Numero de Polos Del Motor de Induccion - AutomatizacionAdrianVargasÎncă nu există evaluări
- GNJ Kit ConversionDocument2 paginiGNJ Kit ConversionHibelertCordóvaEspinosaÎncă nu există evaluări
- Triptico ModificadoDocument1 paginăTriptico ModificadoMargaro85Încă nu există evaluări
- Hardware y SoftwareDocument14 paginiHardware y SoftwareMichelle ChaconÎncă nu există evaluări
- Simbolos Electronicos - Sesion 5 - Fisica 6º de SecundariaDocument12 paginiSimbolos Electronicos - Sesion 5 - Fisica 6º de SecundariaAlejandra Lourdes Revollo QuispeÎncă nu există evaluări
- Ejercicio 1Document15 paginiEjercicio 1xato_xatin_21Încă nu există evaluări
- Laboratorio N°1-Electronica de PotenciaDocument12 paginiLaboratorio N°1-Electronica de PotenciaRicardo OliveraÎncă nu există evaluări
- Diseño de Un Acces PointDocument16 paginiDiseño de Un Acces PointMaximo La Vida ContinuaÎncă nu există evaluări
- Inventario E OMIDocument4 paginiInventario E OMISamuel Marcano LópezÎncă nu există evaluări
- Mop Sistema de Tierras Preventivo & Correctivo 2Document21 paginiMop Sistema de Tierras Preventivo & Correctivo 2Edgar RamirezÎncă nu există evaluări
- LiberarTeléfonosGRATIS PDFDocument2 paginiLiberarTeléfonosGRATIS PDFandrea urbinaÎncă nu există evaluări
- Impresora Zebra TLP2844 DS ESDocument3 paginiImpresora Zebra TLP2844 DS ESmarikonetyÎncă nu există evaluări
- U3 ResumenDocument15 paginiU3 ResumenUriel RangelÎncă nu există evaluări
- Práctica 4 Técnicas Electroanalíticas CuestionarioDocument3 paginiPráctica 4 Técnicas Electroanalíticas CuestionarioJeff CalugullinÎncă nu există evaluări
- Pic 600Document4 paginiPic 600Valentín GonzálezÎncă nu există evaluări
- Irobot Roomba 800 ManualDocument40 paginiIrobot Roomba 800 ManualFelipe RodriguezÎncă nu există evaluări
- Circuito Amplificador para Display de 7 SegmentosDocument1 paginăCircuito Amplificador para Display de 7 Segmentossantiago rodriguezÎncă nu există evaluări
- Sesetec PaginaDocument36 paginiSesetec PaginasesetecÎncă nu există evaluări
- DIGITA VERTICAL ARRAY Dva 2009Document11 paginiDIGITA VERTICAL ARRAY Dva 2009Numa Marcial GaiborÎncă nu există evaluări
- V y DDocument10 paginiV y DAleXiz LOriaaÎncă nu există evaluări
- Circuitos Digitales UNIDAD - I PDFDocument52 paginiCircuitos Digitales UNIDAD - I PDFPrinziipito EmvnuelÎncă nu există evaluări
- Informe Laboratorio Fuente DualDocument23 paginiInforme Laboratorio Fuente DualAlex BogmaÎncă nu există evaluări
- AnalogaDocument4 paginiAnalogaErica Liceth Muñoz GalvisÎncă nu există evaluări
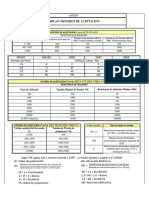
- Tablas de AceptaciónDocument1 paginăTablas de AceptaciónSebastian Iturra MuñozÎncă nu există evaluări