S-ar putea să vă placă și
- Brosch SmartBird en 8s RZ 300311 LoDocument8 paginiBrosch SmartBird en 8s RZ 300311 Loa_tacora3953Încă nu există evaluări
- Digital ModulationDocument9 paginiDigital Modulationelectricalbah100% (1)
- Signals: WaveformsDocument11 paginiSignals: WaveformseurerÎncă nu există evaluări
- Signals: WaveformsDocument11 paginiSignals: WaveformseurerÎncă nu există evaluări
- Replace This Line With Your Paper Identification Number (Double-ClickDocument6 paginiReplace This Line With Your Paper Identification Number (Double-ClickedwinriÎncă nu există evaluări
- Digital ModulationDocument9 paginiDigital Modulationelectricalbah100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Module 6: Advance Engineering MathematicsDocument2 paginiModule 6: Advance Engineering MathematicsSanty Enril Belardo Jr.Încă nu există evaluări
- Is - Iec.60793.1.42.2007 - OPGW Chromatic DisperssionDocument31 paginiIs - Iec.60793.1.42.2007 - OPGW Chromatic DisperssionKumara SubramanianÎncă nu există evaluări
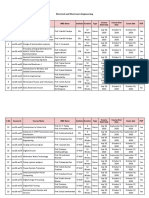
- Electrical and Electronics EngineeringDocument4 paginiElectrical and Electronics EngineeringPrithaBanerjeeÎncă nu există evaluări
- Fan Uc Manuals 1791Document322 paginiFan Uc Manuals 1791Vlad Leucuta100% (3)
- D-5450-1-B HS60G80GL SM EngDocument84 paginiD-5450-1-B HS60G80GL SM EngRuslan Valiakhmetov100% (2)
- Factors Affecting Maximum Power Generation IN Piezoelectric Pulse GeneratorDocument4 paginiFactors Affecting Maximum Power Generation IN Piezoelectric Pulse GeneratorHMBChannel - DhanaÎncă nu există evaluări
- LSQ5 Man-0964 V3.1.0 enDocument48 paginiLSQ5 Man-0964 V3.1.0 enDiego Mondragon100% (1)
- Lightsmart - Pe150E User'S Manual: Multi-Service Fiber Optical MultiplexerDocument119 paginiLightsmart - Pe150E User'S Manual: Multi-Service Fiber Optical MultiplexerHanh LeÎncă nu există evaluări
- VT Catalog PDFDocument11 paginiVT Catalog PDFShreya SharmaÎncă nu există evaluări
- August Inventory 2018Document75 paginiAugust Inventory 2018Cleyton Archbold BarkerÎncă nu există evaluări
- Actuador ML7999B PDFDocument12 paginiActuador ML7999B PDFjose david CardozoÎncă nu există evaluări
- Embedded & Real Time Systems Notes by Suman KalyanDocument20 paginiEmbedded & Real Time Systems Notes by Suman KalyanDaniel Paul100% (2)
- 5G RAN Feature Documentation 5G RAN2.1 - 07 20201229173029Document54 pagini5G RAN Feature Documentation 5G RAN2.1 - 07 20201229173029juliosantanaÎncă nu există evaluări
- Chapter 3Document41 paginiChapter 3Izzah AmaniÎncă nu există evaluări
- DMTE ABB 2csm445001d0202Document12 paginiDMTE ABB 2csm445001d0202Marco VolpeÎncă nu există evaluări
- PDF Sanken 882276Document13 paginiPDF Sanken 882276Moises CelosoÎncă nu există evaluări
- Approval Sheet: Customer ManufacturerDocument7 paginiApproval Sheet: Customer ManufacturerypadillaÎncă nu există evaluări
- Manual FLC3 70Document1 paginăManual FLC3 70joÎncă nu există evaluări
- Tutorial For Automated Design System (ADS) : You Chung Chung Cynthia FurseDocument23 paginiTutorial For Automated Design System (ADS) : You Chung Chung Cynthia Fursehassan abousalehÎncă nu există evaluări
- 10EC64 - AP - QB - Final - TopicsDocument13 pagini10EC64 - AP - QB - Final - TopicsharshithaÎncă nu există evaluări
- Government Approved Test Laboratory: Ia CertificateDocument13 paginiGovernment Approved Test Laboratory: Ia CertificatecisyabÎncă nu există evaluări
- 704af0d354 Mv790 User GuideDocument10 pagini704af0d354 Mv790 User GuideJes TreÎncă nu există evaluări
- Passenger Bus Alert System For Easy Navigation of BlindDocument5 paginiPassenger Bus Alert System For Easy Navigation of BlindArshad Mohammed0% (1)
- A Reduced Complexity Time-Domain Transmitter For UF-OFDMDocument5 paginiA Reduced Complexity Time-Domain Transmitter For UF-OFDMmehran_4xÎncă nu există evaluări
- L4 Translational Mechanical System PDFDocument33 paginiL4 Translational Mechanical System PDFshahabÎncă nu există evaluări
- Ina 122Document11 paginiIna 122Juan C Fdauzon100% (1)
- Veek-Mt2s User ManualDocument50 paginiVeek-Mt2s User ManualKevinÎncă nu există evaluări
- GB38031-2020EN Electric Vehiles Traction Battery Safety RequerimentsDocument15 paginiGB38031-2020EN Electric Vehiles Traction Battery Safety RequerimentsMarianoÎncă nu există evaluări
- IOT Based Automatic Water Container Filler Using ArduinoDocument6 paginiIOT Based Automatic Water Container Filler Using ArduinoInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- LPC2478 PDFDocument93 paginiLPC2478 PDFdecosat2012Încă nu există evaluări