S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Trigonometry HandbookDocument60 paginiTrigonometry HandbookJayakumar SankaranÎncă nu există evaluări
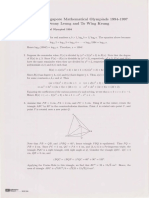
- Solutions To The Singapore Mathematical Olympiads 1994-1997 PDFDocument21 paginiSolutions To The Singapore Mathematical Olympiads 1994-1997 PDFNguyễn Thị LinhÎncă nu există evaluări
- MATH 181-Oblique Triangles and Vectors (11) Term 0306Document16 paginiMATH 181-Oblique Triangles and Vectors (11) Term 0306SharmaineTaguitagOmliÎncă nu există evaluări
- Yearly Plan Maths Form 4Document24 paginiYearly Plan Maths Form 4JiaJia LauÎncă nu există evaluări
- 25 Trigonometric FunctionsDocument29 pagini25 Trigonometric FunctionsSachin KumarÎncă nu există evaluări
- Mu123 - Tma04Document8 paginiMu123 - Tma04helÎncă nu există evaluări
- Mathematics in Ancient India: 1. An OverviewDocument16 paginiMathematics in Ancient India: 1. An Overviewkomal asraniÎncă nu există evaluări
- TrigonometryDocument4 paginiTrigonometrydayatÎncă nu există evaluări
- Trigonometry: Made By:-Suyash Agarwal X I - BDocument47 paginiTrigonometry: Made By:-Suyash Agarwal X I - BSuyash Agarwal100% (1)
- Blue Pelican Java Textbook by Charles E. CookDocument543 paginiBlue Pelican Java Textbook by Charles E. CookAlex PopaÎncă nu există evaluări
- Trigonometric Functions of Acute Angles: Assessment TasksDocument3 paginiTrigonometric Functions of Acute Angles: Assessment Tasksbyunbacooon456Încă nu există evaluări
- Geometry On The Sphere PDFDocument13 paginiGeometry On The Sphere PDFGopi GaÎncă nu există evaluări
- MTH3020Document21 paginiMTH3020pHysiXÎncă nu există evaluări
- Fourier SeriesDocument26 paginiFourier SeriesTushar ChopraÎncă nu există evaluări
- Integrating Additional Mathematics Project WorkDocument34 paginiIntegrating Additional Mathematics Project WorkWilliam yapÎncă nu există evaluări
- Sapce ClamDocument190 paginiSapce ClamIgnacio PazÎncă nu există evaluări
- TRIG POWERS INTEGRALSDocument10 paginiTRIG POWERS INTEGRALSrymacÎncă nu există evaluări
- ETS Calculator ManualDocument43 paginiETS Calculator ManualBasselBashourÎncă nu există evaluări
- The Art of Problem Solving Vol 2 SolutionsDocument188 paginiThe Art of Problem Solving Vol 2 SolutionsRahulKumar100% (4)
- CHP 2 StaticsDocument57 paginiCHP 2 StaticsApril Catherine ZafraÎncă nu există evaluări
- PC 4 7 WorksheetDocument3 paginiPC 4 7 Worksheetapi-261956805Încă nu există evaluări
- IGCSEFM TrigonometryII 3DTrigSineCosineDocument28 paginiIGCSEFM TrigonometryII 3DTrigSineCosinesreelakshmi100% (1)
- Hofierka JaroslavDocument19 paginiHofierka JaroslavMarly ReyesÎncă nu există evaluări
- Year 12 Advanced Mathematics ProblemsDocument7 paginiYear 12 Advanced Mathematics Problemswill bellÎncă nu există evaluări
- ECLR 33 (Matlab) ManualDocument81 paginiECLR 33 (Matlab) ManualKRITIKA 176Încă nu există evaluări
- EE301 Fall2017 hw1 SolutionsDocument8 paginiEE301 Fall2017 hw1 SolutionsÇinko PilÎncă nu există evaluări
- Euler's FormulaDocument25 paginiEuler's Formulaayesha noorÎncă nu există evaluări
- Physics ProjectileDocument9 paginiPhysics ProjectileSkeletonBaakohaÎncă nu există evaluări
- O Level Maths Notes, PDFDocument67 paginiO Level Maths Notes, PDFMahad Imran84% (180)
- Open Handed Lab Power Spectral Density: ObjectiveDocument3 paginiOpen Handed Lab Power Spectral Density: ObjectiveMiraniÎncă nu există evaluări