S-ar putea să vă placă și
- Magia RúnicaDocument231 paginiMagia RúnicaAmdruy, Amador Muin94% (18)
- Taller Espectroscopia IR y MS - 2019Document5 paginiTaller Espectroscopia IR y MS - 2019Jeykco Wilfredo Villavicencio Huanila100% (1)
- Ficha #07 Identidad NacionalDocument3 paginiFicha #07 Identidad NacionalArumy Gutierrez VasquezÎncă nu există evaluări
- Ejercicios de Programacion LogixProDocument10 paginiEjercicios de Programacion LogixProMarte Valdez50% (4)
- Ejercicios de Programacion LogixProDocument10 paginiEjercicios de Programacion LogixProMarte Valdez50% (4)
- Licitacion Publica Grupo 1Document44 paginiLicitacion Publica Grupo 1Alexandra Ramos RojasÎncă nu există evaluări
- Reporte 45006.1 Mantenimiento A Motor Electrico de Comp FEEDDocument13 paginiReporte 45006.1 Mantenimiento A Motor Electrico de Comp FEEDAsesoramiento y Servicios Múltiples S.A.R, C.A.Încă nu există evaluări
- Medina Fisica2 Cap4Document48 paginiMedina Fisica2 Cap4Hector Manuel Mejia CurielÎncă nu există evaluări
- Modelo de Escrito Por Lo Que Se Formulan Alegatos 2Document3 paginiModelo de Escrito Por Lo Que Se Formulan Alegatos 2GilÎncă nu există evaluări
- V1000Document31 paginiV1000Vicpico PicosoÎncă nu există evaluări
- V1000Document31 paginiV1000Vicpico PicosoÎncă nu există evaluări
- Pets Armado de Tolvas de MaderaDocument4 paginiPets Armado de Tolvas de MaderaireneÎncă nu există evaluări
- Problem A Rio Mec FluidDocument277 paginiProblem A Rio Mec FluidBeto Medina BlancoÎncă nu există evaluări
- VLT HvacDocument285 paginiVLT HvacEduardo QuispeÎncă nu există evaluări
- Apéndice Conclusiones Observaciones y RecomendacionesDocument4 paginiApéndice Conclusiones Observaciones y RecomendacionesEduardo QuispeÎncă nu există evaluări
- Presiones Sobre Superficies SumergidasDocument15 paginiPresiones Sobre Superficies SumergidasEduardo QuispeÎncă nu există evaluări
- Presion Lab.Document10 paginiPresion Lab.Eduardo QuispeÎncă nu există evaluări
- SemáforpDocument4 paginiSemáforpEduardo QuispeÎncă nu există evaluări
- hs-7300 2Document2 paginihs-7300 2Eduardo QuispeÎncă nu există evaluări
- TransmisoresDocument57 paginiTransmisoresHalandiÎncă nu există evaluări
- S 0305 Medici On Caudal 1Document29 paginiS 0305 Medici On Caudal 1Postillo Espinoza MessiasÎncă nu există evaluări
- Control de Un Servo Con PLC Usando PIDDocument15 paginiControl de Un Servo Con PLC Usando PIDBrayan ShadyÎncă nu există evaluări
- Sintonizacion Controladores Sep07Document11 paginiSintonizacion Controladores Sep07Madianita EstradaÎncă nu există evaluări
- Guia 8Document10 paginiGuia 8Fernando Zambrano San MartínÎncă nu există evaluări
- Web Descarga 210 GestinMantenimientoRefinera.-nmero4Document10 paginiWeb Descarga 210 GestinMantenimientoRefinera.-nmero4Eduardo QuispeÎncă nu există evaluări
- Actuadores y Selección de VálvulasDocument32 paginiActuadores y Selección de VálvulasEduardo QuispeÎncă nu există evaluări
- ManifoldsDocument16 paginiManifoldscolh_10052789Încă nu există evaluări
- Calibración TermocuplasDocument12 paginiCalibración TermocuplasazulmanticÎncă nu există evaluări
- Ejemplo de Control en CascadaDocument12 paginiEjemplo de Control en CascadaAlirio NuñezÎncă nu există evaluări
- Transmisores:: (Antes Barton Instruments)Document13 paginiTransmisores:: (Antes Barton Instruments)Eduardo QuispeÎncă nu există evaluări
- Entradassalidas AnalogasDocument83 paginiEntradassalidas AnalogasEduardo QuispeÎncă nu există evaluări
- Control de Un Servo Con PLC Usando PIDDocument15 paginiControl de Un Servo Con PLC Usando PIDBrayan ShadyÎncă nu există evaluări
- Sensores TemperaturaDocument51 paginiSensores TemperaturaDarwin ChaleÎncă nu există evaluări
- Control PLC S7200 de SiemensDocument32 paginiControl PLC S7200 de SiemensLuis Alfonso Prada Leon100% (6)
- Actuadores y Selección de VálvulasDocument32 paginiActuadores y Selección de VálvulasEduardo QuispeÎncă nu există evaluări
- ConvertidoresDocument28 paginiConvertidoresEduardo QuispeÎncă nu există evaluări
- 10 Papeles de TrabajoDocument17 pagini10 Papeles de TrabajoKarina Atuncar HuanchoÎncă nu există evaluări
- Guic3b3n Tutorial LogiclyDocument6 paginiGuic3b3n Tutorial LogiclynymgbyÎncă nu există evaluări
- Ciudadania Principio de Igualdad en La Constitución Del EcuadorDocument4 paginiCiudadania Principio de Igualdad en La Constitución Del EcuadorMateoTrujilloÎncă nu există evaluări
- Material Poema 11-08Document3 paginiMaterial Poema 11-08Yeimi VillarroelÎncă nu există evaluări
- Caracas para PrincipiantesDocument147 paginiCaracas para PrincipiantesSolángel RoccocuchiÎncă nu există evaluări
- Esquema de Trabajo para La Reunión de Vicaria de A. Brown JulioDocument2 paginiEsquema de Trabajo para La Reunión de Vicaria de A. Brown JulioEduardo BrusaÎncă nu există evaluări
- Los Hombres Son de Marte y Las Mujeres de VenusDocument3 paginiLos Hombres Son de Marte y Las Mujeres de VenusKaren MoyanoÎncă nu există evaluări
- Angulos de Elevacion y Depresion PDFDocument2 paginiAngulos de Elevacion y Depresion PDFJosé Miguel Trejo100% (1)
- Plan2° 2012-2013Document17 paginiPlan2° 2012-2013Miguel Eduardo Sanchez Frias100% (1)
- Cuadro Nuevas Referencias SHELLDocument1 paginăCuadro Nuevas Referencias SHELLGiancarlo Gonzales CruzÎncă nu există evaluări
- COMUNICADO DAVID 10-7 CorregidoDocument2 paginiCOMUNICADO DAVID 10-7 Corregidodavid bravo riveraÎncă nu există evaluări
- Cerámicas Dentales FinalDocument13 paginiCerámicas Dentales FinalCamila OpazoÎncă nu există evaluări
- OSPINADocument6 paginiOSPINADiego MantillaÎncă nu există evaluări
- Motores Electricos de Media y Alta TencionDocument20 paginiMotores Electricos de Media y Alta TencionCarlos Andres Fuentes BahamondesÎncă nu există evaluări
- Fuenmayor 1975-Slogans Divorcistas PDFDocument32 paginiFuenmayor 1975-Slogans Divorcistas PDFAnonymous LnTsz7cpÎncă nu există evaluări
- Acuerdos Escolares de ConvivenciaDocument30 paginiAcuerdos Escolares de Convivenciajuan jimenezÎncă nu există evaluări
- Que Son Los POESDocument2 paginiQue Son Los POESLuis Alfredo Casanova NinaÎncă nu există evaluări
- Guía de Clase ModeloDocument2 paginiGuía de Clase ModeloRenato MendozaÎncă nu există evaluări
- Gaceta Oficial N°42.128: Normas Legitimación de Capitales Financiamiento Al Terrorismo Armas Destruccion Masiva Actividad AseguradoraDocument20 paginiGaceta Oficial N°42.128: Normas Legitimación de Capitales Financiamiento Al Terrorismo Armas Destruccion Masiva Actividad AseguradoraFinanzas DigitalÎncă nu există evaluări
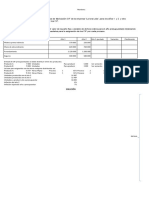
- Evaluación Presupuesto CIFDocument2 paginiEvaluación Presupuesto CIFvalentina garcia cubillosÎncă nu există evaluări
- Plantas Útiles de Un Ejido Tojolabal de Comitán, Chiapas, MéxicoDocument36 paginiPlantas Útiles de Un Ejido Tojolabal de Comitán, Chiapas, MéxicoCaleb Nahaliel Simuta VicenteÎncă nu există evaluări
- Formato de PracticaDocument13 paginiFormato de PracticaSolo NesTor QuispeÎncă nu există evaluări
- Cronograma Valorado de Inversiones (Referencial)Document1 paginăCronograma Valorado de Inversiones (Referencial)Maite MartinezÎncă nu există evaluări