S-ar putea să vă placă și
- Math Texas TAKS With Answers 2009Document51 paginiMath Texas TAKS With Answers 2009aehsgo2collegeÎncă nu există evaluări
- Lesson 4.2 - Greatest Common FactorDocument23 paginiLesson 4.2 - Greatest Common FactorehystadÎncă nu există evaluări
- Pipe Stress Analysis Per ASME B 31.3Document10 paginiPipe Stress Analysis Per ASME B 31.3Agung Pramu Aji100% (1)
- Elementary SurveyingDocument36 paginiElementary Surveyingbluscarab71% (7)
- Bibliometrix PresentationDocument41 paginiBibliometrix Presentationdaksh gupta100% (1)
- Prosafe Rs Maintenance Training: Course #9001Document2 paginiProsafe Rs Maintenance Training: Course #9001daviqueirozdemedeirosÎncă nu există evaluări
- Common Core Grade 5 Math Printable WorksheetsDocument3 paginiCommon Core Grade 5 Math Printable WorksheetsJessicaÎncă nu există evaluări
- Introduction To Vectors and TensorsDocument37 paginiIntroduction To Vectors and TensorsRitunjay JhaÎncă nu există evaluări
- Section 2 ProjectDocument23 paginiSection 2 ProjectAlex manÎncă nu există evaluări
- A Review of Membrane Processes and Renewable Energies For DesalinationDocument18 paginiA Review of Membrane Processes and Renewable Energies For DesalinationThipsuree KornboonraksaÎncă nu există evaluări
- Pantone - CMYK - RGB ConversionDocument41 paginiPantone - CMYK - RGB ConversionmanhhungvpcÎncă nu există evaluări
- Rescursos HidricosDocument9 paginiRescursos HidricosDarwin JavierÎncă nu există evaluări
- RIEGELS NielsDocument4 paginiRIEGELS NielszekibelesÎncă nu există evaluări
- Remote SensingDocument35 paginiRemote SensingMArio SabinoÎncă nu există evaluări
- Application of Remote Sensing in National Water PlansDocument57 paginiApplication of Remote Sensing in National Water PlansIlyes ChalghafÎncă nu există evaluări
- Water 09 00803Document14 paginiWater 09 00803Fase BakÎncă nu există evaluări
- Towards Circularization of Energy Cycle by Implementation OF Hydroelectricity in Existing Hydraulic Systems - Nexus SDGs Position PaperDocument8 paginiTowards Circularization of Energy Cycle by Implementation OF Hydroelectricity in Existing Hydraulic Systems - Nexus SDGs Position PaperSPE Baghdad sectionÎncă nu există evaluări
- Hydrological Vs Hydraulic RoutingDocument6 paginiHydrological Vs Hydraulic RoutingRahulKaushikÎncă nu există evaluări
- Use of Simulation Models in Water ResourcesDocument8 paginiUse of Simulation Models in Water ResourcesRyan L. TambalqueÎncă nu există evaluări
- Civil Eng ExtDocument7 paginiCivil Eng Exthamzaoui612Încă nu există evaluări
- Water 02 00239Document18 paginiWater 02 00239dequanzhouÎncă nu există evaluări
- Ejlw 2007-01-01 Clemmens Simple Approach To Surface Irrigation Design-TheoryDocument19 paginiEjlw 2007-01-01 Clemmens Simple Approach To Surface Irrigation Design-TheoryFlounfÎncă nu există evaluări
- Thesis ProposalDocument16 paginiThesis ProposalAbdulbasit Aba BiyaÎncă nu există evaluări
- Modeling Real Time ReviewDocument17 paginiModeling Real Time ReviewEstrada Zavala JuliettÎncă nu există evaluări
- Project BrijeshDocument18 paginiProject BrijeshVadhel BriÎncă nu există evaluări
- Water 07 06285Document16 paginiWater 07 06285marvinÎncă nu există evaluări
- Tamás Karches: Theses of The PHD DissertationDocument14 paginiTamás Karches: Theses of The PHD DissertationGökhan TurhanÎncă nu există evaluări
- Water 08 00601Document18 paginiWater 08 00601AbdulAziz shahidÎncă nu există evaluări
- Hydrological Studies For Small HydropoweDocument18 paginiHydrological Studies For Small HydropoweRakesh SahÎncă nu există evaluări
- Sponge Cities Emerging Approaches Challenges and Opportunities-5-2Document10 paginiSponge Cities Emerging Approaches Challenges and Opportunities-5-2Hector Alfredo Gutierrez RomeroÎncă nu există evaluări
- Territorial Approach To Increased EnergyDocument11 paginiTerritorial Approach To Increased EnergySantin GregorioÎncă nu există evaluări
- Application of The Hechms Model For Runoff Simulation of Upper Blue Nile River Basin 2157 7587 1000199Document9 paginiApplication of The Hechms Model For Runoff Simulation of Upper Blue Nile River Basin 2157 7587 1000199Luis VargasÎncă nu există evaluări
- Water Supply Literature ReviewDocument4 paginiWater Supply Literature Reviewfuzkxnwgf100% (1)
- Shannak ProposalDocument3 paginiShannak ProposalCivil CivilÎncă nu există evaluări
- A GIS Based Evaluation of University of Ilorin Primaryy Water Distribution NetworkDocument14 paginiA GIS Based Evaluation of University of Ilorin Primaryy Water Distribution NetworkDr Olayinka Okeola100% (2)
- E3sconf Riverflow2018 01002Document2 paginiE3sconf Riverflow2018 01002Basem MohamedÎncă nu există evaluări
- Impact of A Changing Environment On Drainage System PerformanceDocument8 paginiImpact of A Changing Environment On Drainage System PerformanceMuhammed Ahmed100% (1)
- Urban Hydrology, Hydraulics Chapter 01Document4 paginiUrban Hydrology, Hydraulics Chapter 01yasirjurabaÎncă nu există evaluări
- Water 09 00068 PDFDocument28 paginiWater 09 00068 PDFJhoan CruzadoÎncă nu există evaluări
- Urban StormwaterDocument17 paginiUrban StormwaterZerihun AlemayehuÎncă nu există evaluări
- Hydrology: An Efficient GPU Implementation of A Coupled Overland-Sewer Hydraulic Model With Pollutant TransportDocument22 paginiHydrology: An Efficient GPU Implementation of A Coupled Overland-Sewer Hydraulic Model With Pollutant TransportOliver Colmenares Cortés100% (1)
- Integrated Modeling of The Belgian Coastal ZoneDocument15 paginiIntegrated Modeling of The Belgian Coastal ZonePham NgocÎncă nu există evaluări
- Modlagem WetlandDocument10 paginiModlagem WetlandAdrielle CastilhoÎncă nu există evaluări
- Hydrologic Simulation ModelsDocument14 paginiHydrologic Simulation ModelsMajedaÎncă nu există evaluări
- Water 10 00503Document16 paginiWater 10 00503HendraÎncă nu există evaluări
- Literature Review On Water Supply SystemDocument6 paginiLiterature Review On Water Supply Systemaflssjrda100% (1)
- Wu 2021Document16 paginiWu 2021Abinash SahooÎncă nu există evaluări
- Evaluation of Combined Sewer System Operation StraDocument21 paginiEvaluation of Combined Sewer System Operation StraMohammed SalahÎncă nu există evaluări
- Art - Control of Channel Bed Morphology in Large-Scale River Networks Using A Genetic AlgorithmDocument20 paginiArt - Control of Channel Bed Morphology in Large-Scale River Networks Using A Genetic AlgorithmdasievÎncă nu există evaluări
- Research ArticleDocument11 paginiResearch Articlesudheer chekkaÎncă nu există evaluări
- Water Energy Nexus Exploring The Interdependence of Water and EnergyDocument8 paginiWater Energy Nexus Exploring The Interdependence of Water and EnergyMohammadreza ShirvaniÎncă nu există evaluări
- Water 15 03998Document14 paginiWater 15 03998jyotsna pandeyÎncă nu există evaluări
- GómezSellés2021 Article RigidVersusVariableEnergySourcDocument18 paginiGómezSellés2021 Article RigidVersusVariableEnergySourcAbhishek Kumar SinhaÎncă nu există evaluări
- Micro Watershed To Basin Scale Impacts of Widespread Adoption of Watershed Management Interventions in Blue Nile BasinDocument6 paginiMicro Watershed To Basin Scale Impacts of Widespread Adoption of Watershed Management Interventions in Blue Nile BasinZerihun AlemayehuÎncă nu există evaluări
- Groundwater Modeling Research PapersDocument4 paginiGroundwater Modeling Research Papersafmcgebln100% (1)
- Water 07 00153Document22 paginiWater 07 00153Shiv DaniÎncă nu există evaluări
- Hydrologic Simulation Models: An Najah National University Faculty of Graduate StudiesDocument14 paginiHydrologic Simulation Models: An Najah National University Faculty of Graduate StudiesMajedaÎncă nu există evaluări
- Campus Study of The Impact of Ultra-Low Flush Toilets On Sewerage Networks and Water UsageDocument17 paginiCampus Study of The Impact of Ultra-Low Flush Toilets On Sewerage Networks and Water UsagefruitzebraÎncă nu există evaluări
- A Chance-Constrainedmulti-Periodmodel For A Special Multi-Reservoir SystemDocument15 paginiA Chance-Constrainedmulti-Periodmodel For A Special Multi-Reservoir Systemdurmuş canÎncă nu există evaluări
- Water: Determination of Spatial and Temporal Variability of Soil Hydraulic Conductivity For Urban RunoDocument15 paginiWater: Determination of Spatial and Temporal Variability of Soil Hydraulic Conductivity For Urban RunoAnusia ThevendaranÎncă nu există evaluări
- Determination of Subcatchment and Watershed Boundaries in A Complex and Highly Urbanized LandscapeDocument34 paginiDetermination of Subcatchment and Watershed Boundaries in A Complex and Highly Urbanized LandscapeMinh VũÎncă nu există evaluări
- Vepra MarrjeDocument14 paginiVepra MarrjegertjaniÎncă nu există evaluări
- Processes: Innovative E That Increases COD Removal E Flow WetlandsDocument13 paginiProcesses: Innovative E That Increases COD Removal E Flow WetlandsPablo JiménezÎncă nu există evaluări
- Urban Flood Nazaf (17113075)Document6 paginiUrban Flood Nazaf (17113075)Nazaf AhzamÎncă nu există evaluări
- Water GyDocument44 paginiWater GyRao PanidapuÎncă nu există evaluări
- Water: Investigating Tradeo Infrastructure Using A Planning-Level Decision Support ToolDocument27 paginiWater: Investigating Tradeo Infrastructure Using A Planning-Level Decision Support ToolCaila PanerioÎncă nu există evaluări
- Finite Element Simulation of Construction Site Dewatering: Carlos Alonso, Alejandro Ferrer, Vicente SoriaDocument8 paginiFinite Element Simulation of Construction Site Dewatering: Carlos Alonso, Alejandro Ferrer, Vicente SoriajulianaÎncă nu există evaluări
- UpscDocument17 paginiUpscRavi SainiÎncă nu există evaluări
- Narmada No SourceDocument13 paginiNarmada No SourceRitunjay JhaÎncă nu există evaluări
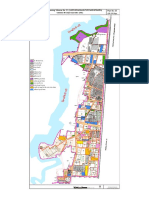
- Draft Town Planning Scheme No. 31 (VADSAR-MANJALPUR-NAGARWADA) Sub To Govt DT 30-04-2019 PDFDocument1 paginăDraft Town Planning Scheme No. 31 (VADSAR-MANJALPUR-NAGARWADA) Sub To Govt DT 30-04-2019 PDFRitunjay JhaÎncă nu există evaluări
- Taluka Village ListDocument68 paginiTaluka Village ListRitunjay JhaÎncă nu există evaluări
- Billed Line Tota Pipe IssuedDocument15 paginiBilled Line Tota Pipe IssuedRitunjay JhaÎncă nu există evaluări
- Show DocumentDocument1 paginăShow DocumentRitunjay JhaÎncă nu există evaluări
- CISF - Examination Rules of AC-LDCE-2014 Issued On 01.03.2014Document28 paginiCISF - Examination Rules of AC-LDCE-2014 Issued On 01.03.2014Ritunjay JhaÎncă nu există evaluări
- 579 2Document164 pagini579 2Ritunjay JhaÎncă nu există evaluări
- 15 Air Quality Management ADocument9 pagini15 Air Quality Management AEdgarvitÎncă nu există evaluări
- Adi PayDocument42 paginiAdi PayRitunjay JhaÎncă nu există evaluări
- Charge of OfficerDocument51 paginiCharge of OfficerRitunjay JhaÎncă nu există evaluări
- G Vat-RulesDocument118 paginiG Vat-RulesNitesh SanghviÎncă nu există evaluări
- P Fe PF Services Manual 1972Document183 paginiP Fe PF Services Manual 1972Ritunjay JhaÎncă nu există evaluări
- Vigilance Corner List of RegistersDocument13 paginiVigilance Corner List of RegistersRitunjay JhaÎncă nu există evaluări
- Delegation PowersDocument48 paginiDelegation PowersRitunjay JhaÎncă nu există evaluări
- PubliDocument10 paginiPubliRitunjay JhaÎncă nu există evaluări
- Adi PayDocument42 paginiAdi PayRitunjay JhaÎncă nu există evaluări
- PD JuneDocument4 paginiPD JuneRitunjay JhaÎncă nu există evaluări
- Bulletin Venturi ScrubbersDocument2 paginiBulletin Venturi ScrubbersRitunjay JhaÎncă nu există evaluări
- Independence of India - AdiDocument15 paginiIndependence of India - AdiAditya BhaleÎncă nu există evaluări
- Fesc 116Document11 paginiFesc 116ak09Încă nu există evaluări
- Bulletin Venturi ScrubbersDocument2 paginiBulletin Venturi ScrubbersRitunjay JhaÎncă nu există evaluări
- Batra Continuum-Mech NotesDocument131 paginiBatra Continuum-Mech NotesRitunjay Jha100% (2)
- HW4 Spencer1Document1 paginăHW4 Spencer1Ritunjay JhaÎncă nu există evaluări
- HW4 SpencerDocument4 paginiHW4 SpencerRitunjay JhaÎncă nu există evaluări
- HW4 SpencerDocument4 paginiHW4 SpencerRitunjay JhaÎncă nu există evaluări
- Introduction of Solid Mechanics (ME 621) : Problem 1Document4 paginiIntroduction of Solid Mechanics (ME 621) : Problem 1Ritunjay JhaÎncă nu există evaluări
- Ebook PDF Science Einstein's Physics of IllusionDocument9 paginiEbook PDF Science Einstein's Physics of IllusionMuhammad Azhar IqbalÎncă nu există evaluări
- Congratulations! Your Booking Is Now ConfirmedDocument6 paginiCongratulations! Your Booking Is Now ConfirmedTufail AibaniÎncă nu există evaluări
- Coursera - Data Analytics - Course 1Document8 paginiCoursera - Data Analytics - Course 1UtjaleÎncă nu există evaluări
- Discrete MathDocument1 paginăDiscrete MathAngelo John R. JavinezÎncă nu există evaluări
- Liferay 6.2 User GuideDocument740 paginiLiferay 6.2 User GuideAshokFelix50% (2)
- Wireless-Tag WT-900M: DescriptionDocument12 paginiWireless-Tag WT-900M: DescriptionjoseiutÎncă nu există evaluări
- 35 MG2 and 38DLP Series Gage Upgrade Using GageviewDocument3 pagini35 MG2 and 38DLP Series Gage Upgrade Using GageviewBoulHich BoulHichÎncă nu există evaluări
- Course Details Telugu TestingDocument6 paginiCourse Details Telugu TestingMadhukar PatelÎncă nu există evaluări
- Devashish Kapadnis ResumeDocument1 paginăDevashish Kapadnis ResumeShubham MeshramÎncă nu există evaluări
- GoAir - Airline Tickets and Fares - Boarding PassDocument1 paginăGoAir - Airline Tickets and Fares - Boarding PassShubham PalÎncă nu există evaluări
- Account Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument10 paginiAccount Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit Balanceavinashdeshmukh7027Încă nu există evaluări
- Groover L Swot AnalysisDocument20 paginiGroover L Swot Analysisapi-412091880Încă nu există evaluări
- Department of Electrical Engineering: Riphah College of Science & Technology Faculty of Engineering & Applied SciencesDocument5 paginiDepartment of Electrical Engineering: Riphah College of Science & Technology Faculty of Engineering & Applied SciencesAafaqIqbalÎncă nu există evaluări
- Matrix COSEC-Product V2R1 PDFDocument24 paginiMatrix COSEC-Product V2R1 PDFMartin JohnÎncă nu există evaluări
- SCI (Serial Communication Interface) : The: DCX NetworksDocument51 paginiSCI (Serial Communication Interface) : The: DCX NetworksJesús GutiérrezÎncă nu există evaluări
- Consent FormDocument4 paginiConsent FormNessaÎncă nu există evaluări
- Enable Jumbo Frames For iSCSIDocument1 paginăEnable Jumbo Frames For iSCSIrshandyÎncă nu există evaluări
- Format LeafletDocument4 paginiFormat LeafletEllsrhmaÎncă nu există evaluări
- Land Use and Land Cover Classification For Bangladesh 2005 On Google Earth EngineDocument6 paginiLand Use and Land Cover Classification For Bangladesh 2005 On Google Earth EngineAlejandra RojasÎncă nu există evaluări
- ELS 13 Agustus 2022 RevDocument16 paginiELS 13 Agustus 2022 RevYANÎncă nu există evaluări
- Machtelt Garrels Bash Guide For Beginners 2nd EdDocument65 paginiMachtelt Garrels Bash Guide For Beginners 2nd EdZrkkrzÎncă nu există evaluări
- JCMONDocument5 paginiJCMONDevender5194Încă nu există evaluări
- Hill ClimbingDocument12 paginiHill ClimbingVishesh YadavÎncă nu există evaluări
- De Thi Thu Vao THPT 2022 - Online 03.4.2022Document5 paginiDe Thi Thu Vao THPT 2022 - Online 03.4.2022mai.nguyen.thi.phuongÎncă nu există evaluări