S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- IS 875 - 1987 Part 4 Design Loads For BLDG & STR - Snow Load PDFDocument10 paginiIS 875 - 1987 Part 4 Design Loads For BLDG & STR - Snow Load PDFArjun Kisan ShendeÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- IS 875 Part 1-1987Document40 paginiIS 875 Part 1-1987bhapar44Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Septic Tank-Model PDFDocument1 paginăSeptic Tank-Model PDFArjun Kisan ShendeÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Finall Reportt 5 27-05-13 6Document79 paginiFinall Reportt 5 27-05-13 6Arjun Kisan Shende100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Retrofitting of Earthquake Affected BuildingsDocument131 paginiRetrofitting of Earthquake Affected BuildingsArjun Kisan ShendeÎncă nu există evaluări
- 1 s2.0 0141029695000345 MainDocument16 pagini1 s2.0 0141029695000345 MainArjun Kisan ShendeÎncă nu există evaluări
- On Pre Stressed ConcreteDocument6 paginiOn Pre Stressed ConcreteArjun Kisan Shende50% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Effect of Rice Husk Ash On Properties of High Strength ConcreteDocument8 paginiEffect of Rice Husk Ash On Properties of High Strength ConcreteArjun Kisan ShendeÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Power Train: - 170 - STMGXXX 4/97Document66 paginiPower Train: - 170 - STMGXXX 4/97Evan AT YoelÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
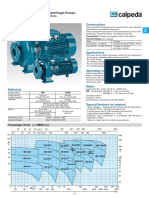
- Construction: Close Coupled Centrifugal PumpsDocument11 paginiConstruction: Close Coupled Centrifugal PumpsAhmed AbarchidÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Chapter 1 Introduction To Biochemistry and ThermodynamicsDocument4 paginiChapter 1 Introduction To Biochemistry and ThermodynamicsMamamiaÎncă nu există evaluări
- Coffee Brewing: Wetting, Hydrolysis & Extraction RevisitedDocument8 paginiCoffee Brewing: Wetting, Hydrolysis & Extraction Revisitedsheetalnirmal02Încă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Symbols of Oil Gas PipingDocument3 paginiSymbols of Oil Gas PipingDelvin Davis M0% (1)
- Practice Paper Chem 12, Unit-IiDocument2 paginiPractice Paper Chem 12, Unit-IiANUPAM S PRAKASHÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- 1603 03093Document51 pagini1603 03093pippoÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- ASME Cases of Boiler and Pressure Vessel CodeDocument3 paginiASME Cases of Boiler and Pressure Vessel CodeSanthosh ShrinivasÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- May 2022 Ce Board Exam Policarpio 3: Eview NnovationsDocument3 paginiMay 2022 Ce Board Exam Policarpio 3: Eview NnovationsKian InductivoÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- 7 Design of Singly Reinforced BeamsDocument16 pagini7 Design of Singly Reinforced Beamskiran sreekumarÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Theodolite HandbookDocument37 paginiTheodolite HandbooksuhasÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Analysis of G+20 RC Building in Different Zones Using Etabs: Narla Mohan, A.Mounika VardhanDocument14 paginiAnalysis of G+20 RC Building in Different Zones Using Etabs: Narla Mohan, A.Mounika VardhanRohan ChauguleÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- TurbochargerDocument8 paginiTurbochargersudheeshÎncă nu există evaluări
- Heating & Cooling LoadsDocument66 paginiHeating & Cooling LoadsAbdullah Maqsood50% (2)
- Avalanches, Facts and InformationDocument1 paginăAvalanches, Facts and InformationAiled Basurto AlvarezÎncă nu există evaluări
- Graphene Based TextileDocument10 paginiGraphene Based TextileTaofiqur Rahman ShochchoÎncă nu există evaluări
- 105mm Enhanced GunDocument38 pagini105mm Enhanced Gungrindormh53100% (1)
- Ruukki Double Grade S420MH S355J2H RectangularDocument6 paginiRuukki Double Grade S420MH S355J2H Rectangularhooky1Încă nu există evaluări
- Electrostatic AnalyzerDocument6 paginiElectrostatic AnalyzerKcirtap ZkethÎncă nu există evaluări
- 7.7 High Pressure Vapour Liquid Equilibria: V L I IDocument7 pagini7.7 High Pressure Vapour Liquid Equilibria: V L I IayushÎncă nu există evaluări
- Determining Wicking of Fibrous Glass Fiber Blanket Insulation (Aircraft Type)Document3 paginiDetermining Wicking of Fibrous Glass Fiber Blanket Insulation (Aircraft Type)Ahmed AlzubaidiÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Nitrogen RejectionDocument7 paginiNitrogen RejectionOmar TocmoÎncă nu există evaluări
- Efa FitnetDocument20 paginiEfa FitnetQuoc VinhÎncă nu există evaluări
- NEET-Exam-2022 With SolutionDocument78 paginiNEET-Exam-2022 With SolutionNIKHIL BISHNOIÎncă nu există evaluări
- Solutions Manual Chapter13Document42 paginiSolutions Manual Chapter13Daeyoung KimÎncă nu există evaluări
- Column Thumb RulesDocument4 paginiColumn Thumb RulesAnand.5100% (1)
- CV - Tony BroccoliDocument25 paginiCV - Tony BroccolitbroccoliÎncă nu există evaluări
- Materi MatrikulasiDocument72 paginiMateri MatrikulasiAyziffyÎncă nu există evaluări
- 4PH0 2PR Que 20170616Document20 pagini4PH0 2PR Que 20170616aya abdulfattahÎncă nu există evaluări
- Lec6 TorsionDocument26 paginiLec6 TorsionJordan DavidsonÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)