S-ar putea să vă placă și
- Ucla Department of Computer Science Email: Ucla Department of Electrical Engineering EmailDocument4 paginiUcla Department of Computer Science Email: Ucla Department of Electrical Engineering EmailCelis GonzálezÎncă nu există evaluări
- Instrumenting The World With Wireless Sensor NetworksDocument4 paginiInstrumenting The World With Wireless Sensor Networksshariifcqaadir985Încă nu există evaluări
- Report - Ajith 2Document20 paginiReport - Ajith 2Antony JinoÎncă nu există evaluări
- ReportDocument26 paginiReportDeepak_Gilkarw_7497Încă nu există evaluări
- Wireless Sensor NetworkDocument3 paginiWireless Sensor NetworkShounak KatyayanÎncă nu există evaluări
- Approximate Point in Triangulation (APIT) Based Localization Algorithm in Wireless Sensor NetworkDocument4 paginiApproximate Point in Triangulation (APIT) Based Localization Algorithm in Wireless Sensor NetworkIJIRSTÎncă nu există evaluări
- A Review: Wireless Sensor Networks and Its Application, Platforms, Standards and ToolsDocument7 paginiA Review: Wireless Sensor Networks and Its Application, Platforms, Standards and ToolsseventhsensegroupÎncă nu există evaluări
- Alex PDFDocument30 paginiAlex PDFAnonymous YffydbOYDeÎncă nu există evaluări
- WSN Lecturer Notes Unit1Document11 paginiWSN Lecturer Notes Unit1Kommisetty MurthyrajuÎncă nu există evaluări
- An Energy-Aware Technique To Improve The Lifetime of Cell Phone Based Wsns Using Isa100.11ADocument7 paginiAn Energy-Aware Technique To Improve The Lifetime of Cell Phone Based Wsns Using Isa100.11AInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Research Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksDocument10 paginiResearch Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksNaveen ChilamkurtiÎncă nu există evaluări
- Sistemas de Sensores en Red Lectura9-CDocument26 paginiSistemas de Sensores en Red Lectura9-Cmarchelo_cheloÎncă nu există evaluări
- Wireless Sensor Networks: Chris Guy School of Systems Engineering, University of Reading, Reading RG6 6AY, UKDocument4 paginiWireless Sensor Networks: Chris Guy School of Systems Engineering, University of Reading, Reading RG6 6AY, UKMedÎncă nu există evaluări
- Protocols For Self-Organization of A Wireless Sensor NetworkDocument24 paginiProtocols For Self-Organization of A Wireless Sensor NetworkMukesh KumarÎncă nu există evaluări
- Adaptive Routing Protocol For Reliable Sensor Network ApplicationsDocument25 paginiAdaptive Routing Protocol For Reliable Sensor Network ApplicationsLehel TothÎncă nu există evaluări
- Ant Colony Optimization For Improving Network Lifetime in Wireless Sensor NetworksDocument7 paginiAnt Colony Optimization For Improving Network Lifetime in Wireless Sensor NetworksInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Matrix Based Energy Efficient Routing in Static Wireless Sensor NetworksDocument9 paginiMatrix Based Energy Efficient Routing in Static Wireless Sensor NetworksInternational Journal of Sensor & Related NetworksÎncă nu există evaluări
- A Survey On Data Approximation Techniques For Wireless Sensor Networks by Pavitha N.Document4 paginiA Survey On Data Approximation Techniques For Wireless Sensor Networks by Pavitha N.ijr_journalÎncă nu există evaluări
- A Nobel Approach For Entropy Reduction of Wireless Sensor NetworksDocument5 paginiA Nobel Approach For Entropy Reduction of Wireless Sensor NetworksEditor IJRITCCÎncă nu există evaluări
- Thesis Report-ENERGY EFFICIENT CLUSTERING ALGORITHM BASED ON MAXIMUM LIKELIHOOD ESTIMATION IN WIRELESS SENSOR NETWORKDocument61 paginiThesis Report-ENERGY EFFICIENT CLUSTERING ALGORITHM BASED ON MAXIMUM LIKELIHOOD ESTIMATION IN WIRELESS SENSOR NETWORKUday Rai100% (2)
- Data-Centric Routing Protocols in Wireless Sensor Networks: A SurveyDocument6 paginiData-Centric Routing Protocols in Wireless Sensor Networks: A SurveyAnuskaÎncă nu există evaluări
- S-MAC Simulation Using NS2Document65 paginiS-MAC Simulation Using NS2Pravin Gareta100% (7)
- Student ID (In Figures) : 1 0 0 2 0 5 7 6 7 7: Course Code & Name: CC217 NetworkingDocument8 paginiStudent ID (In Figures) : 1 0 0 2 0 5 7 6 7 7: Course Code & Name: CC217 NetworkingSrijan Raj DahalÎncă nu există evaluări
- Project Report On Super Nodes - An Embedded ApproachDocument24 paginiProject Report On Super Nodes - An Embedded ApproachKarthikÎncă nu există evaluări
- C CJJCDocument16 paginiC CJJCpiyushsethiaÎncă nu există evaluări
- Ijaiem 2013 04 27 078Document7 paginiIjaiem 2013 04 27 078International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Wireless Sensor Networks - CambriaDocument3 paginiWireless Sensor Networks - CambriaNaveen P KalroÎncă nu există evaluări
- Reliable Energy Efficient Clustering Scheme Analysis Using Mobile Sink in Wireless Sensor NetworksDocument6 paginiReliable Energy Efficient Clustering Scheme Analysis Using Mobile Sink in Wireless Sensor NetworksseventhsensegroupÎncă nu există evaluări
- Enhancement in Divide and Conquer Scheme To Increase Efficiency of The NetworksDocument5 paginiEnhancement in Divide and Conquer Scheme To Increase Efficiency of The NetworksijsretÎncă nu există evaluări
- Energy Efficient Routing Algorithms in Wireless Sensor NetworksDocument29 paginiEnergy Efficient Routing Algorithms in Wireless Sensor NetworksKinko GuaÎncă nu există evaluări
- Module 3 - Wireless Adhoc and Sensor NetworksDocument61 paginiModule 3 - Wireless Adhoc and Sensor Networkspratik16892Încă nu există evaluări
- EAR ClusterDocument20 paginiEAR ClusterNivedita Acharyya 2035Încă nu există evaluări
- Threshold Sensitive Routing Protocol For Wireless Sensor NetworksDocument40 paginiThreshold Sensitive Routing Protocol For Wireless Sensor NetworksPerumal NamasivayamÎncă nu există evaluări
- Introduction To Wireless Sensor NetworksDocument6 paginiIntroduction To Wireless Sensor NetworksIndraneel RoyÎncă nu există evaluări
- IOSR JournalsDocument8 paginiIOSR JournalsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- 2010 Article 311Document21 pagini2010 Article 311Ruy Lopez ClosedÎncă nu există evaluări
- E-Tarjome-E17415 231026 014331Document9 paginiE-Tarjome-E17415 231026 014331alizadeyahyaÎncă nu există evaluări
- Wireless Sensor Networks - IntroductionDocument21 paginiWireless Sensor Networks - IntroductionBalamurugan GopalakrishnanÎncă nu există evaluări
- An Improved Pegasis Protocol To Enhance Energy Utilization in WSNDocument10 paginiAn Improved Pegasis Protocol To Enhance Energy Utilization in WSNParendra SinghÎncă nu există evaluări
- Distributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksDocument7 paginiDistributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Energy-Aware Management For Cluster-Based Sensor Networks: Mohamed YounisDocument18 paginiEnergy-Aware Management For Cluster-Based Sensor Networks: Mohamed YounisFaseeh SultanÎncă nu există evaluări
- 11 - Chapter 2Document66 pagini11 - Chapter 2wissemÎncă nu există evaluări
- An Adaptive Energy Efficient Reliable Routing Protocol For Wireless Sensor NetworksDocument5 paginiAn Adaptive Energy Efficient Reliable Routing Protocol For Wireless Sensor Networkseditor_ijarcsseÎncă nu există evaluări
- Full Seminar ReportDocument17 paginiFull Seminar Reportnaveenb273Încă nu există evaluări
- LEACH Ad HocDocument10 paginiLEACH Ad HocHimadri BhattacharjeeÎncă nu există evaluări
- Wireless Sensor Networks The Basics Part I PDFDocument8 paginiWireless Sensor Networks The Basics Part I PDFAditya WijayantoÎncă nu există evaluări
- Hohlt 2004Document10 paginiHohlt 2004Eko PrayitnoÎncă nu există evaluări
- Unit 4Document8 paginiUnit 4PriyanshuÎncă nu există evaluări
- Research Papers On Wireless Sensor NetworkingDocument5 paginiResearch Papers On Wireless Sensor Networkingfvffv0x7100% (1)
- Virtual Energy Based Encryption & Keying On Wireless Sensor NetworkDocument10 paginiVirtual Energy Based Encryption & Keying On Wireless Sensor NetworkInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Ijesat 2012 02 Si 01 05Document7 paginiIjesat 2012 02 Si 01 05Ijesat JournalÎncă nu există evaluări
- 5 ReportDocument70 pagini5 ReportD RohiniÎncă nu există evaluări
- A Taxonomy of Wireless Micro-Sensor Network Models: This Work Was Partially Supported by NSF Grant EIA-9911099Document8 paginiA Taxonomy of Wireless Micro-Sensor Network Models: This Work Was Partially Supported by NSF Grant EIA-9911099Manel MeliÎncă nu există evaluări
- Study of Wireless Sensor Network For IoT ApplicationDocument8 paginiStudy of Wireless Sensor Network For IoT ApplicationAnonymous KMdKCFNht8Încă nu există evaluări
- PHD Thesis Wireless Sensor NetworksDocument5 paginiPHD Thesis Wireless Sensor Networksafcnuaacq100% (2)
- Comprehensive Study of Routing Management in Wireless Sensor Networks-Part-2Document11 paginiComprehensive Study of Routing Management in Wireless Sensor Networks-Part-2tranhoahueÎncă nu există evaluări
- Heliyon: Lucia Keleadile Ketshabetswe, Adamu Murtala Zungeru, Mmoloki Mangwala, Joseph M. Chuma, Boyce SigweniDocument43 paginiHeliyon: Lucia Keleadile Ketshabetswe, Adamu Murtala Zungeru, Mmoloki Mangwala, Joseph M. Chuma, Boyce SigweniAdum BabuÎncă nu există evaluări
- Heliyon: Lucia Keleadile Ketshabetswe, Adamu Murtala Zungeru, Mmoloki Mangwala, Joseph M. Chuma, Boyce SigweniDocument43 paginiHeliyon: Lucia Keleadile Ketshabetswe, Adamu Murtala Zungeru, Mmoloki Mangwala, Joseph M. Chuma, Boyce SigweniAdum BabuÎncă nu există evaluări
- Energy Management in Wireless Sensor NetworksDe la EverandEnergy Management in Wireless Sensor NetworksEvaluare: 4 din 5 stele4/5 (1)
- Co-operative and Energy Efficient Body Area and Wireless Sensor Networks for Healthcare ApplicationsDe la EverandCo-operative and Energy Efficient Body Area and Wireless Sensor Networks for Healthcare ApplicationsÎncă nu există evaluări
- AAAI - 08 - Local Search For DCOPDocument6 paginiAAAI - 08 - Local Search For DCOPRejeev CvÎncă nu există evaluări
- New Covert Channels in HTTP: Adding Unwitting Web Browsers To Anonymity SetsDocument7 paginiNew Covert Channels in HTTP: Adding Unwitting Web Browsers To Anonymity SetsRejeev CvÎncă nu există evaluări
- The Economics of Censorship ResistanceDocument12 paginiThe Economics of Censorship ResistanceRejeev CvÎncă nu există evaluări
- Presentation On Using SPICE: by Shweta - KulkarniDocument24 paginiPresentation On Using SPICE: by Shweta - KulkarniRejeev CvÎncă nu există evaluări
- Presentation On Using SPICE: by Shweta - KulkarniDocument24 paginiPresentation On Using SPICE: by Shweta - KulkarniRejeev CvÎncă nu există evaluări
- 10 1 1 94 737Document16 pagini10 1 1 94 737Gagan ChopraÎncă nu există evaluări
- Wave Length EstimatorDocument8 paginiWave Length EstimatorRejeev CvÎncă nu există evaluări
- Trading Floors WSDocument86 paginiTrading Floors WSAlok Singh100% (3)
- Translator Resume SampleDocument2 paginiTranslator Resume SampleIsabel JimenezÎncă nu există evaluări
- Notes Ilw1501 Introduction To LawDocument11 paginiNotes Ilw1501 Introduction To Lawunderstand ingÎncă nu există evaluări
- Several Terms Redirect Here. For Other Uses, See,, and - This Article Is About Jinn in Islam. For Other Uses, See andDocument2 paginiSeveral Terms Redirect Here. For Other Uses, See,, and - This Article Is About Jinn in Islam. For Other Uses, See andEduard Loberez ReyesÎncă nu există evaluări
- J. C. Penney and Ron JohnsonDocument8 paginiJ. C. Penney and Ron JohnsonadamÎncă nu există evaluări
- 5 Methods: Mark Bevir Jason BlakelyDocument21 pagini5 Methods: Mark Bevir Jason BlakelyGiulio PalmaÎncă nu există evaluări
- Tongue Diagnosis Good AcurateDocument12 paginiTongue Diagnosis Good AcuratejasoneinsteinÎncă nu există evaluări
- Product and Services: Karmic Nakshatras in Tamil AstrologyDocument4 paginiProduct and Services: Karmic Nakshatras in Tamil AstrologySushant ChhotrayÎncă nu există evaluări
- Reading Exercise 2Document2 paginiReading Exercise 2Park Hanna100% (1)
- Jones Rural School - 300555Document13 paginiJones Rural School - 300555Roland Acob Del Rosario Jr.100% (1)
- Expansion and Contraction of Demand:: Change in Demand vs. Change in Quantity DemandedDocument6 paginiExpansion and Contraction of Demand:: Change in Demand vs. Change in Quantity DemandedbadarÎncă nu există evaluări
- Interjections Worksheet PDFDocument1 paginăInterjections Worksheet PDFLeonard Patrick Faunillan Bayno100% (1)
- Sample Legal Advice Problems and AnswersDocument4 paginiSample Legal Advice Problems and AnswersJake Bryson DancelÎncă nu există evaluări
- Objectives: A. Identify The Reasons For Keeping Business Records and B. Perform Key Bookkeeping TaskDocument11 paginiObjectives: A. Identify The Reasons For Keeping Business Records and B. Perform Key Bookkeeping TaskMarife CulabaÎncă nu există evaluări
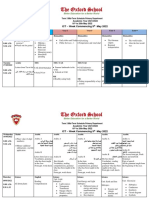
- Term 3 Mid-Term Assessment ScheduleDocument9 paginiTerm 3 Mid-Term Assessment ScheduleRabia MoeedÎncă nu există evaluări
- Peter John G. Dadula: (Career Objective) (Educati ON)Document1 paginăPeter John G. Dadula: (Career Objective) (Educati ON)Jericho JacalneÎncă nu există evaluări
- The Court Cards: Hans Christian AndersenDocument4 paginiThe Court Cards: Hans Christian Andersenbresail4Încă nu există evaluări
- Paroles by PrevertDocument29 paginiParoles by PrevertCity Lights90% (10)
- Camisole No.8 Pattern by MyFavoriteThingsKnitwearDocument7 paginiCamisole No.8 Pattern by MyFavoriteThingsKnitwearGarlicÎncă nu există evaluări
- Elements of User Interface DesignDocument30 paginiElements of User Interface DesignRomer Garcia100% (1)
- Ejercicios de Relative ClausesDocument1 paginăEjercicios de Relative ClausesRossyÎncă nu există evaluări
- Reaction Paper PoliticsDocument1 paginăReaction Paper PoliticsDenise Jim GalantaÎncă nu există evaluări
- Marketing Ethics Amal 12-09-10Document11 paginiMarketing Ethics Amal 12-09-10amalroy1986Încă nu există evaluări
- The Body Shop Marketing Plan AnalysisDocument18 paginiThe Body Shop Marketing Plan AnalysisHepita0% (1)
- DPC Rough Draft by Priti Guide (1953)Document6 paginiDPC Rough Draft by Priti Guide (1953)Preeti GuideÎncă nu există evaluări
- Talking About Special Occasions American English StudentDocument5 paginiTalking About Special Occasions American English Studentmarinewuser8Încă nu există evaluări
- 00 FA17 ENG 2070 SyllabusDocument9 pagini00 FA17 ENG 2070 SyllabusLauren SalisburyÎncă nu există evaluări
- Writen Practice of Qualification and Certification SHDocument15 paginiWriten Practice of Qualification and Certification SHSisira Chandrasoma100% (3)
- Usher Hall, Edinburgh: HistoryDocument1 paginăUsher Hall, Edinburgh: HistoryTarun TangoÎncă nu există evaluări
- Analysis of The Style and Terminology Problems in Translating Legal TextsDocument19 paginiAnalysis of The Style and Terminology Problems in Translating Legal TextsMarvin EugenioÎncă nu există evaluări