S-ar putea să vă placă și
- SOW Brunei Rock Physics Figures TablesDocument3 paginiSOW Brunei Rock Physics Figures TablesDidik HartadiÎncă nu există evaluări
- Aade 10 DF Ho 26Document9 paginiAade 10 DF Ho 26Trần Anh ĐứcÎncă nu există evaluări
- App b5Document1 paginăApp b5Didik HartadiÎncă nu există evaluări
- App A2Document1 paginăApp A2Didik HartadiÎncă nu există evaluări
- CP 1bDocument1 paginăCP 1bDidik HartadiÎncă nu există evaluări
- Gamma RayDocument5 paginiGamma RayDenisha Betaci GultomÎncă nu există evaluări
- Crossplots reveal porosity, lithology and saturationDocument1 paginăCrossplots reveal porosity, lithology and saturationDidik HartadiÎncă nu există evaluări
- Porosity and Lithology Determination From Formation Density Log and CNL Compensated Neutron LogDocument1 paginăPorosity and Lithology Determination From Formation Density Log and CNL Compensated Neutron LogDidik HartadiÎncă nu există evaluări
- Porosity and Lithology CrossplotDocument1 paginăPorosity and Lithology CrossplotDidik HartadiÎncă nu există evaluări
- Logging Tool Response in Sedimentary RocksDocument1 paginăLogging Tool Response in Sedimentary RocksAmine ChihiÎncă nu există evaluări
- Appendix A: Water Saturation Grid For Porosity Versus ResistivityDocument1 paginăAppendix A: Water Saturation Grid For Porosity Versus ResistivityDidik HartadiÎncă nu există evaluări
- App A4Document1 paginăApp A4Didik HartadiÎncă nu există evaluări
- Basic Well Log Analysis - CH 10Document3 paginiBasic Well Log Analysis - CH 10Herdiana PrasetyaningrumÎncă nu există evaluări
- App A1Document1 paginăApp A1Didik HartadiÎncă nu există evaluări
- SPE59356-Effect of Formation Damage Length and Reservoir Thickness On The Inflow Performance of Horizontal WellsDocument13 paginiSPE59356-Effect of Formation Damage Length and Reservoir Thickness On The Inflow Performance of Horizontal WellsDidik HartadiÎncă nu există evaluări
- Effect of WOB On Drillstring & WellboreDocument7 paginiEffect of WOB On Drillstring & WellboreDidik HartadiÎncă nu există evaluări
- Steam TablesDocument6 paginiSteam TablesRichard Olawoyin100% (1)
- 1 - 345 - TRL 267Document32 pagini1 - 345 - TRL 267Didik HartadiÎncă nu există evaluări
- Saturated water-Pressure tableDocument11 paginiSaturated water-Pressure tableDidik HartadiÎncă nu există evaluări
- Tablas de VaporDocument4 paginiTablas de VaporUlises Perez CandiaÎncă nu există evaluări
- ENERGY EFFICIENCY AND RENEWABLE ENERGY GeothermalDocument8 paginiENERGY EFFICIENCY AND RENEWABLE ENERGY GeothermalTegar Putra Adi PerdanaÎncă nu există evaluări
- Geothermal Two Phase Flow Correlation in Vertical PipesDocument32 paginiGeothermal Two Phase Flow Correlation in Vertical PipesDidik HartadiÎncă nu există evaluări
- Doosan S180WV Mobile ExcavatorDocument3 paginiDoosan S180WV Mobile ExcavatordidikhartadiÎncă nu există evaluări
- Tablas de VaporDocument4 paginiTablas de VaporUlises Perez CandiaÎncă nu există evaluări
- SPE59356-Effect of Formation Damage Length and Reservoir Thickness On The Inflow Performance of Horizontal WellsDocument13 paginiSPE59356-Effect of Formation Damage Length and Reservoir Thickness On The Inflow Performance of Horizontal WellsDidik HartadiÎncă nu există evaluări
- Doosan DX35Z Mini Excavator Specs & DimensionsDocument3 paginiDoosan DX35Z Mini Excavator Specs & DimensionsDidik Hartadi100% (1)
- Geothermal Two Phase Flow Correlation in Vertical PipesDocument32 paginiGeothermal Two Phase Flow Correlation in Vertical PipesDidik HartadiÎncă nu există evaluări
- Application of Drilling Performance Data To Overpressure DetectionDocument8 paginiApplication of Drilling Performance Data To Overpressure DetectionDidik HartadiÎncă nu există evaluări
- Doosan S035 Mini ExcavatorDocument3 paginiDoosan S035 Mini ExcavatorDidik HartadiÎncă nu există evaluări
- Doosan S030P Mini ExcavatorDocument3 paginiDoosan S030P Mini ExcavatorDidik HartadiÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Lecture 3 - Conversion and Reactor SizingDocument15 paginiLecture 3 - Conversion and Reactor Sizing88l8Încă nu există evaluări
- Slab On GradeDocument56 paginiSlab On GradeTere Mota DondéÎncă nu există evaluări
- Camless Engine PresentationDocument20 paginiCamless Engine PresentationRavi Bhadani80% (10)
- Domino MagnificationDocument13 paginiDomino MagnificationYoceli RecobaÎncă nu există evaluări
- Irgb 4062 DPBFDocument13 paginiIrgb 4062 DPBFCarlos OliveiraÎncă nu există evaluări
- X-Ray Production and Interactions GuideDocument111 paginiX-Ray Production and Interactions GuidexhibaxÎncă nu există evaluări
- Laser PhysicsDocument41 paginiLaser PhysicsdarthpatxÎncă nu există evaluări
- Seminar Report On: BeltsDocument14 paginiSeminar Report On: BeltsMayank RawatÎncă nu există evaluări
- (CDA) Pub-22 Copper For BusbarsDocument116 pagini(CDA) Pub-22 Copper For Busbarsnooruddinkhan1100% (2)
- Clausius Mossotti ArticleDocument4 paginiClausius Mossotti ArticleFlor Hernandez TiscareñoÎncă nu există evaluări
- 1.chemical KineticsDocument24 pagini1.chemical KineticsVinod AgrawalÎncă nu există evaluări
- Mechanical Properties of Biological TissuesDocument8 paginiMechanical Properties of Biological TissuesHitendra SonkarÎncă nu există evaluări
- Quantum Bhabna Safalyagatha 0Document226 paginiQuantum Bhabna Safalyagatha 0mamunngsÎncă nu există evaluări
- Rack and Pinion Gear DesignDocument32 paginiRack and Pinion Gear DesignmattgrubbsÎncă nu există evaluări
- Fatigue TanakaDocument16 paginiFatigue TanakaWilmer E Cumbicus JiménezÎncă nu există evaluări
- Spacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaDocument13 paginiSpacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaCarlos Cesar ArandaÎncă nu există evaluări
- Eigenvectors-Wolfram Mathematica 9 Documentation PDFDocument6 paginiEigenvectors-Wolfram Mathematica 9 Documentation PDFMahfudz ShodiqÎncă nu există evaluări
- Physics 1Document8 paginiPhysics 1Precious BalgunaÎncă nu există evaluări
- Mass Transfer CoefficientsDocument3 paginiMass Transfer CoefficientsjuandiegoCOÎncă nu există evaluări
- Experiment 40B Light, Energy and SpectraDocument11 paginiExperiment 40B Light, Energy and SpectraAdnan SheraziÎncă nu există evaluări
- Atomic mass unit (Dalton) definition and historyDocument25 paginiAtomic mass unit (Dalton) definition and historypraveenÎncă nu există evaluări
- Advertisement: Magnetic CurrentDocument6 paginiAdvertisement: Magnetic Currentstormrunner002Încă nu există evaluări
- Synthesis of Inorganic Solids Using MicrowavesDocument14 paginiSynthesis of Inorganic Solids Using MicrowavesMuaathe IbrahimÎncă nu există evaluări
- Hour Exam 3 SolutionsDocument4 paginiHour Exam 3 SolutionscekardÎncă nu există evaluări
- Exercises ArchimedesDocument4 paginiExercises ArchimedesAnonymous UypCttW100% (2)
- Double Integrals 2012Document17 paginiDouble Integrals 2012DIey ChokiEyÎncă nu există evaluări
- Physics (A Summary of Its Definition)Document6 paginiPhysics (A Summary of Its Definition)biltspovertyÎncă nu există evaluări
- 9 ContactmodelingDocument56 pagini9 Contactmodelinganirudh666Încă nu există evaluări
- Natural Frequency Testing GuideDocument12 paginiNatural Frequency Testing GuideRais RijalÎncă nu există evaluări
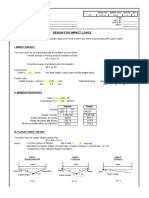
- Drop Object-Plastic HingeDocument8 paginiDrop Object-Plastic HingeBolarinwaÎncă nu există evaluări