Documente Academic
Documente Profesional
Documente Cultură
Determinación de La Potencia y El Torque
Încărcat de
Jorge Florez CastrejonTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Determinación de La Potencia y El Torque
Încărcat de
Jorge Florez CastrejonDrepturi de autor:
Formate disponibile
DETERMINACIN DE LA POTENCIA Y EL TORQUE
EN MOTORES DE COMBUSTIN INTERNA
MEDIANTE LA TCNICA DE LA ACELERACIN
LIBRE
CARLOS EDUARDOMERCHN RAMOS
UNIVERSIDAD INDUSTRIAL DESANTANDER
FACULTAD DE INGENIERASFSICO MECNICAS
ESCUELA DE INGENIERA MECNICA
BUCARAMANGA
2.004
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
vi
CONTENIDO
Pg.
INTRODUCCION 1
1. POTENCIA YTORQUE ENMOTORESDECOMBUSTIN
INTERNA 4
1.1. MEDIDA DEL PAR Y LA POTENCIA 6
1.2. RELACIN DE COMPRESIN Y POTENCIA DEL MOTOR 7
2. MODELOMATEMTICODE LA TCNICA DEACELERACIN
LIBRE 9
2.1. MTODOSDIRECTOS 9
2.1.1. Celdas deensayo 9
2.1.1.1. Frenos defriccin 9
2.1.1.2. Frenoshidrulicos 10
2.1.1.3. Frenoselctricos 12
2.1.1.4. Frenos decorrientecontina 13
2.1.1.5. Dinammetros derodillos 16
2.2. MTODOSINDIRECTOS 17
2.2.1. Variablesamedir 18
2.3. MODELO MATEMTICO EMPRICO PARA CALCULAR EL
TORQUE Y LA POTENCIA PARA UN MOTOR ALTERNATIVO
DE COMBUSTIN INTERNA 19
3. CADENA DEMEDICIN 23
3.1. SENSORESPARA MEDIR LA VELOCIDAD ANGULAR 23
3.1.1. Sensores inductivos 24
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
vii
3.1.2. Sensoresfotoelctricos 25
3.1.3. Sensor deefectoHall paramedicin deR.P.M. 25
3.1.4. Seleccin del sensor 26
3.2. DISEO E IMPLEMENTACIN DEL SISTEMA DE
ACONDICIONAMIENTODE LA SEAL 27
3.2.1. Acondicionamiento desensores develocidad 28
3.2.1.1. Sensor develocidad deefecto Hall 29
3.2.1.2. Sensor develocidad inductivo 31
3.2.1.3. Sensor develocidad fotoelctricoreflexivo 32
3.2.2. Conversinfrecuenciavoltajeparasensores develocidad 33
3.2.3. Acondicionamiento desensor decorrienteHall 35
3.3. DISEO DE LASFUENTESDE ALIMENTACIN DE DC PARA LOS
MDULOSDE ACONDICIONAMIENTO 36
3.3.1. Reduccin detensiny aislamiento 37
3.3.2. Rectificadores deondacompleta 37
3.3.3. Filtrado 38
3.3.4. Regulacin deDC 38
3.3.5. Fuente de5VDC 39
3.4. TARJETASDE ADQUISICIN DE DATOS 41
3.4.1. Tipos detarjetas en funcin de laforma deconexin 42
3.4.1.1. BusISA 42
3.4.1.2. BusPCI 42
3.4.1.3. Conector PCMCIA 42
3.4.1.4. Conector PC104 43
3.4.1.5. BusCompactPCI 43
3.4.1.6. Puerto paralelo 43
3.4.1.7. BusUSB 43
3.4.2. Bloqueconector 45
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
NOMENCLATURA OGLOSARIO
NOTACIN
Rad Radianes
I Momento deInercia [
2
m Kg - ]
e
M Esel momentoefectivo del motor [ m N - ]
MCIA Motor deCombustin InternaAlternativo
RPM Revolucionespor minuto.
CV Caballos devapor
Kw Kilowatios
C.C. Corrientecontinua
PMS Puntomuerto superior
PMI Punto muerto inferior
e
N
Potenciaen funcin de lavelocidad angular del motor
j Kw
max e
N
Potenciamximaefectivanominal del motor
j Kw
n
Variacin de lavelocidad angular
j rpm
N
n
RPM del motor a lamximapotenciaefectivanominal
j rpm
.
LMTA Laboratorio deMquinasTrmicasAlternativas.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
RESUMEN
TTULO:
DETERMINACIN DE LA POTENCIA Y TORQUE EN MOTORES DE
COMBUSTIN INTERNA MEDIANTE LA TCNICA DE LA
ACELERACIN LIBRE.
AUTOR:
Carlos Eduardo MerchnRamos.
PALABRASCLAVES:
Motores deCombustinInterna, Potencia, Torque, Medicin.
DESCRIPCIN:
El objetivo de este proyecto es contribuir con la misin de la Universidad
Industrial de Santander, de atender las necesidades de desarrollo de las
distintas tecnologas aplicadas actualmente en nuestro pas; con este trabajo
de grado se da inicio al proceso investigativo enfocado al desarrollo de
nuevastcnicas de diagnstico demotores decombustininternaalternativos
mediantepruebas de inspeccinno intrusivas.
La tcnica se desarroll con base en las ecuaciones matemticas que
determinan la dinmica de un motor de combustin interna. La tcnica fue
desarrolladaparamedir lapotenciay torqueapartir delavelocidad angular
del motor, acelerando el motor sin someterlo a ninguna carga diferente a las
perdidas mecnicas ocasionadas por la transmisin del vehculo y lafriccin
de los componentes del mismo. El resultado es una curva de potencia y
torque quepermiteobservar la variacin deestos dos factores en funcin de
la velocidad angular del motor sin carga, y a partir de estos resultados se
puede tener un indicativo del estado del automotor. Es una tcnica
relativamente econmica, comparada con los mtodos convencionales para
medir potenciay torque, y no requierequesedesmonteel motor parallevarlo
a un dinammetro, quees otra variablequeacarrea altos costos demano de
obray prdidas deliberadas detiempo.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
SUMMARY
TITLE:
DETERMINING OF THE POWER AND TORQUE OF INTERNAL
COMBUSTION ENGINES BY MEANS OF THE FREE ACCELERATION
TECHNIQUE
AUTHORS:
Carlos Eduardo MerchnRamos.
KEY WORDS:
Internal Combustion Engines, Power, Torque, Free acceleration, Automatic
System.
DESCRIPTION:
The task of this project is to contribute with the mission of the Industrial
University of Santander, to assisting the necessities of development of the
different technologies applied at the moment in our country; with this
graduate work beginning is given to the investigative process focused to the
development of new techniques of diagnoseof alternativemotors of internal
combustion by means of tests of inspection without uncoveringtheengine.
This technique was developed with base in the mathematical equations that
determine the dynamics of a motor of internal combustion. The technique
was developed to measure the power and torque, starting from the angular
speed of the motor, accelerating the engine without subjecting it to any load
different to the lost mechanics caused by the transmission of the vehicleand
thefriction of thecomponents of thesameone. Theresult is acurveof power
and torque that it allows to observe the variation of these two factors in
function of the angular speed of the motor without load, and starting from
theseresults, it ispossibletoget an indicativeof thestateof therailcar. Thisis
arelatively economic technique, compared with theconventional methods to
measure power and torque, and it doesn't require that you disassembles the
motor to take it to a dynamometer that is another variable that carries high
manpower costs and lost deliberateof time.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
INTRODUCCIN
Para un programa de mantenimiento y diagnstico de un motor de
combustin interna, es de gran importancia el clculo de la potencia y el
torquedel vehculo paracomparar estos resultados con los valores defbrica
del automotor. Los mtodos convencionales paradichocalculoson deun alto
costo y se requiere que el vehculo sea movilizado hasta el lugar donde se
encuentreel equipo demedicin, pues la gran mayora deestos son robustos
y su movilizacin aumentarael costo del diagnstico. Uno delos problemas
actuales de las flotas de transporte es aumentar la productividad en la
operacin (consumo de combustible) y al mismo tiempo controlan las
emisiones.
En algunos sectores, las compaas suelen tener planes de mantenimiento
tendientes, no slo a la conservacin del vehculo, sino tambin a evitar la
mala imagen producida por los vehculos averiados duranteel servicio. Esto
implica, a menudo, la realizacin deoperaciones innecesarias, queen vez de
garantizar el buen funcionamiento del elemento, seconvierten en unafuente
de incertidumbres por montajes incorrectos. Los programas de
mantenimiento preventivo suponen un importante desembolso econmico
paraestas compaas, tanto por inmovilizacin del parque devehculos como
por el coste demanoobray materiales.
Esto justificael desarrollo detecnologas propias quepropicien lainnovacin
y la inversin en equipos con nuevas tcnicas de diagnstico basadas en
inspecciones no intrusivas, quepermiten detectar anomalas sin necesidad de
desmontar ningn elemento, y quehacen uso detecnologas modernas como
la microelectrnica y la informtica, lo que en gran medida, alivia las
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
2
intervenciones de mantenimiento sistemtico y permite detectar fallas
incipientes, programando las reparaciones necesarias paraevitar quelleguen
a producir averas. Dentro de estas tcnicas de diagnstico esta la de
determinar el torquey lapotenciaen el motor, lacual sellevaracabo por el
mtodo de la aceleracin libre y que ayudar a ser parte de estediagnstico
del motor.
El captulo 1 tiene como fin presentar los conceptos fundamentales de los
motores de combustin interna y su relacin con la potencia y el torque, las
cuales son variables que nos da un indicativo del estado de una mquina
trmicaalternativa, y sedaunabreveintroduccin alos motores enfocadaal
diagnstico de losmismos.
En el captulo 2, sepresenta el modelo matemtico, quees el fundamento el
cual setom como baseparael desarrollo delatcnica. Ademssepresentan
los diferentes tipos de medicin de potencia, y las clases de dinammetros
que se usan en el medio y se resalta las ventajas u desventajas frente a la
tcnica propuesta en este trabajo de grado. Tambin se muestran en este
capitulo los mtodos directos eindirectos paralamedicin de lapotenciacon
susrespectivascaractersticas, ventajasy desventajas.
En el capitulo3contienetodalainformacinacercadelacadenademedicin,
los sensores empleados en la tcnica, sus respectivas caractersticas fsicas y
elctricas. Tambin seencuentran lostipos detarjetas deadquisicin de datos
ms comunes y las caractersticas de la tarjeta quese escogi. Se presenta el
acondicionamiento de la seal para los diferentes sensores empleados en la
investigacin. Se presentan, tambin, en este captulo, las principales
caractersticas del softwareutilizado en el proyecto.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
3
El capitulo 4 contiene la informacin correspondiente a los ensayos
experimentales que se llevaron a cabo, durante toda la investigacin,
enunciando los diferentes problemas y eventualidades durante el desarrollo
de la misma. Tambin se muestra en este captulo la calibracin del
dinammetro de la Universidad. Dichos ensayos experimentales se
dividieron en ensayos realizados en el laboratorio LMTA en la Escuela de
Ingeniera de la UIS y ensayos realizados en campo, estos ltimos se
realizaron con el respaldo de Campesa empresa quefacilit un chasis de un
motor NPR (motor representativo del parqueautomotor deBucaramanga), y
deCotrander LTDA., con aval de lospropietarios.
En el capitulo 5 se presenta la Interfase Hombre Mquina (IHM) donde se
muestralafilosofay caractersticas del diseo e implementacin de laIHM y
las ventajas que tendr para los operarios que empleen esta metodologa
durante los programas de mantenimiento preventivo y predictivo de las
flotas detransporteurbano.
En el captulo 6 se encuentran los lmites de alerta y alarma en los motores
analizados duranteel proyecto.
En el captulo 7, seencuentrael anlisis decostos del proyecto incluyendo la
mano deobray equipos empleados.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
6
1. POTENCIA YTORQUE ENMOTORESDECOMBUSTININTERNA
Desde el punto de vista termodinmico, siempre se ha querido que la
eficienciadeun motor sealo mas altaposible; y dichaeficienciaes larelacin
entre la potencia til que el motor entrega y la cantidad de energa total
empleadaparael funcionamiento de lamquinatrmica.
Es entonces de gran importancia saber la potencia til entregada por las
mquinas trmicas, queparanuestro estudio son los Motores deCombustin
Interna Alternativos (MCIA). La medicin de la potencia implica un trabajo
por unidad detiempo, y estetrabajorepresentael productodeunafuerzapor
una distanciaotorquemultiplicadopor lavelocidad angular.
El par motor o torque, cualidad de generar potencia, se define como la
tendencia quetienela fuerza a hacer girar un cuerpo sobreel queacta, o la
capacidad para vencer una carga externa. El torque se mide en newton-
metros en el sistemamtricoy en libras(f) - piesenel sistemaingls. El torque
es lamagnitud delafuerza derotacin ejercidapor el cigeal, y variasegn
lasrevolucionespor minuto. [7]
Los caballos de vapor miden la potencia o capacidad de un rotor de realizar
un trabajo. En el sistema mtrico, semideen kilovatios. Un caballo devapor
es igual a 33.000pies-libras(f) de trabajo por minuto. Existen varios mtodos
paramedir lapotenciaen caballos devapor:
Potenciaal freno: Es lapotencia disponibleen el eje deunamquina.
Potenciaindicada: Es la potencia desarrollada dentro del cilindro del
motor por laexpansin de losgases de lacombustin.
Potencia por prdidas mecnicas: es la potencia que se pierde por
friccin.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
Potencianeta: es lapotenciamximadisponibleprocedentedel motor
con todos losaccesoriosactivados.
Potencia bruta: es la potencia disponible por cortos perodos de
tiempo. [7]
Figura1.1. Curvas caractersticas deun MCIA, (motor NKR).
En el diseo deun motor, seseleccionan componentes tales comoel cigeal,
el mltiple deadmisin, el sistema deescapey las vlvulas, paraoptimizar la
potencia, y las curvas detorque; estas curvas sepueden observar en lafigura
1.1. El motor de un automvil desarrolla un torque mayor a menor nmero
de revoluciones. Los motores de competencia desarrollan mayor potencia en
regmenes elevados de velocidad de giro, pero no funcionan bien a baja
velocidad. La ideaes conseguir el mximo torquey potenciadisponibles enel
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
6
rango de revoluciones ms amplio posible. Algunos dinammetros estn
equipados con computadoras que registran las curvas de torque en los
distintos valores depotencia. Estas pruebas depotenciay par, serigen por la
normaSAE 1349[1].
La potencia tambin toma gran importancia cuando hablamos de
contaminacin ambiental y consumo decombustible, yaquelos motores que
han perdido potencia, tienden acontaminar ms.
1.1. MEDICINDEL PARY LA POTENCIA
Para la medicin de potencia en los dinammetros la forma de someter a
carga el motor es mediante un sistema hidrulico que que se opone al
movimiento del motor progresivamente. La mayor parte de las unidades de
absorcin de los dinammetrosestn controladas por lacantidad deaguaque
penetraen el dispositivo.
La unidad de absorcin consta de dos elementos: un rotor y un estator. La
turbinaintentamovilizar el agua, pero el estator detieneestemovimiento. La
unidad de carga es similar a una llave dinamomtrica que mide la carga
aplicada. La magnitud de la carga a la que se somete el motor y el torque
producido por steseusan paracalibrar lapotencia. Lafrmulaparacalcular
lapotenciaes lasiguiente:
CV
m p r Torque
N
e
;
5250
. . .
= (1)
Deestamanera, un motor quegiraa2625rpmy desarrolla500pies-libras de
torqueproduceunapotencia de250caballos devapor. [6]
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
7
Las lecturas detorqueserealizan cada500rpm. Latemperaturadel motor es
un factor que determina la potencia generada, de modo que a menor
temperatura, mayor potencia. En un motor fri cabe unacantidad mayor de
mezcla deairey combustible. [2]
El calor es el factor quehacequeel aireseexpanda. Lamedidaquecompara
el volumen del flujo de aire que entra en el motor con la cantidad mxima
que en teora podra entrar en l (es lo mismo que la cilindrada) se conoce
como rendimiento volumtrico. El rendimiento volumtrico vara con la
temperatura y la velocidad del motor. Por ejemplo, a 2000 rpm, el
rendimiento volumtrico puedeser del 85%, mientras quea4000rpm, podra
ser de tan solo 65%. La relacin de aire y combustible del motor semide de
acuerdo con el peso de estos dos componentes en gramos. Una relacin de
aire/ combustible de15:1equivaleaproximadamentea151gramosdeairepor
cada kilogramo de combustible. La relacin estequiomtrica de aire y
combustible (14,8: 1) es la mejor para obtener la combustin ms completa y
el nivel de emisiones mas adecuado. La potencia mxima segenera con una
relacin de aire combustible de 12:1 a 12,5:1. La relacin para obtener la
mximaeconomaes de15:1a16:1. [2]
1.2. RELACINDECOMPRESINY POTENCIA DEL MOTOR
Durante la combustin, la energa potencial de la mezcla de aire y
combustible se transforma en energa trmica (calor) y energa cintica. La
relacin de compresin afecta a la potencia que un motor puede generar,
aumentando el rendimiento trmico del mismo. Si se comprime la mezcla,
confinndola en un espacio mas reducido, la presin de la combustin
aumenta y la mezcla se expande ms durante el tiempo de explosin. Una
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
mayor cantidad de la energa trmica del combustible se transforma en
trabajo, a lavez queescapaunamenor cantidad decalor del motor.
Figura1.2. Esquema de losvolmenescaractersticos en el cilindro deun
motor.
tal Volumen to
muerto Volumen
=
c
r
(2)
En lafigura1.2serepresentan el volumentotal de lacarrera deun pistn y el
volumen muerto en la parte superior, cabe notar que la relacin de
compresin esel cocienteentreel volumentotal y el volumenmuerto.
Cada punto de variacin en la relacin de compresin equivale
aproximadamente a un cuatro por ciento de variacin de la potencia,
resultando proporcional en todo el rango defuncionamiento del motor, pero
el gran inconvenientees la auto detonacin del combustibleen el caso delos
motores a gasolina, lo cual genera una ineficiencia en la potencia entregada
por el motor. [6]. La ecuacin 2 muestra matemticamente la definicin de
relacin decompresin. La relacin decompresin estfuertementeligada a
la potencia de los motores, y es un dato indispensable para el clculo de
dichapotenciacuando el fabricanteno lasuministra.
PMI
PMS
Volumen total
Volumen muerto
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
9
2. MODELOMATEMTICODE LA TCNICA DEACELERACIN
LIBRE
Para validar laimplementacin deesta tcnica primero debemos conocer los
diferentes mtodos usados en la actualidad para determinar la potencia y el
torqueen losmotores decombustin internaalternativos.
Existen dos mtodos para calcular el torque y la potencia en mquinas
trmicas alternativas, los mtodos directos aplicados en la industria marina,
el sector agroindustrial, en lageneracin deenergay en el sector automotriz
en general y los mtodos indirectos, que ocupan el desarrollo de esta
investigacin, acontinuacin sepresentan los dosmtodos:
2.1. MTODOSDIRECTOS
Entra losmsusadosestn las celdas deensayoy dinammetros derodillos.
2.1.1.Celdas de ensayo. Que son bsicamente de tres tipos tales como, los
dinammetros por friccin, dinammetros hidrulicos y los dinammetros
elctricos, usados en las fbricas como implementos de control de calidad,
para la investigacine innovacin.
2.1.1.1. Frenosdefriccin. El freno defriccin mecnico por zapatay tambor
fue el primero utilizado, llamado "Freno de Prony", si bien debido a su
inestabilidad y dificultad de regulacin y refrigeracin, hoy es slo un
antecedentehistrico.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
10
2.1.1.2Frenos hidrulicos. El freno hidrulico es similar a aun convertidor
hidrulico depar, en el quese impidegirar al ejedesalida. Secomponedeun
rotor y una carcasa o estator llena de agua que sirve tanto de elemento
frenantecomo refrigerante.
La potencia del motor absorbida por el freno se transforma en calor,
necesitndoseuna alimentacin continuade agua fra. Para unatemperatura
de entrada al freno de 200 C y una salida de 600 C se necesita por Kw.
frenado, un caudal de20
h
dm
3
aproximadamente. Paraevitar el deterioro del
freno la temperatura del agua a la salida no debe sobrepasar en general los
600C.
Figura2.1Freno dinamomtricohidrulico.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
11
En la figura 2.1 se puede apreciar un motor diesel, acoplado a un
dinammetro hidrulico, es evidentequeeste mtodo requieredesmontar el
motor del vehculo y transportarlo hasta el sitio donde se encuentre dicho
dinammetro.
De los diversosfrenos dinamomtricoshidrulicos quesehandesarrolladose
explicarn dostiposconstructivos:
- derotor interior
- derotor exterior
As como dostipos deregulacin:
- Por compuertas
- Por nivel de lquido
Durante el funcionamiento, el agua de los alvolos del rotor es expulsada a
gran velocidad por la accin de la fuerza centrfuga introducindose en los
alvolos del estator por el permetro externo. Estos ltimos poseen unaforma
tal quehacequeel aguaretornea los del rotor amenor velocidad por laparte
ms prximaal eje derotacin.
Deestaforma latrayectoriadel aguaes helicoidal, produciendo el torbellino
de este movimiento un efecto de frenado entre el rotor y el estator, como
consecuencia del rozamientoentre las superficies del frenoy el aguaexistente
en su interior. La resistencia que el agua opone al giro del rotor reacciona
sobreel estator, produciendo un par igual al par motor.
Determinados modelos de los frenos hidrulicos Schenck, tienen las partes
mviles dispuestas exteriormente al estator, el cual est montado en forma
basculante y unido al sistema demedida defuerza. Estadisposicin permite
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
12
aadir un freno de friccin sobre la cara exterior del rotor para aumentar el
par defrenadoabajo rgimen.
La regulacin de la carga resistente se puede efectuar interponiendo unas
compuertas en el espacio entre los alvolos del estator y del rotor.
Accionando un volante exterior al estator se aproximan o alejan del eje de
rotacin las dos compuertas haciendo inactivo a los efectos de frenado un
nmero menor omayor decavidades.
En laregulacin por nivel delquido, al girar el rotor el aguaquehay dentro
del freno sufre la accin de las fuerzas centrfugas formando un anillo, cuyo
espesor sepuederegular estrangulando lasalidao laentrada deagua.
El par de frenado de los frenos dinamomtricos hidrulicos es
aproximadamente proporcional al cuadrado del nmero de revoluciones
(curva caracterstica de respuesta aproximadamente cuadrtica), lo que les
hacemuy estables (M
2
).
Las ventajas deestetipo defrenoson:
- Bajocostoparapotenciasabsorbidas importantes.
- Gran duracin.
- Reparacinrpiday pococostosa.
Como inconvenientes podemoscitar:
- Pocaversatilidad de lascurvas depar resistente.
- Par de frenado fuertementedependiente de la presin delared hidrulica,
loquepuedeproducir inestabilidad.
Estas consideraciones hacen que el freno hidrulico sea el ms utilizado en
produccin y en ensayos deresistencia.
2.1.1.3 Frenos elctricos. Para determinar la potencia efectiva se pueden
utilizar generadores de corriente elctrica. As por ejemplo si se acopla un
motor trmico aunadnamo conectadaaunaresistenciaelctrica, lapotencia
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
13
del motor se utilizar en accionarla. Esta potencia se puede determinar
midiendo con un voltmetro y un ampermetro la potencia elctrica
suministrada por la dnamo. En este mtodo debe tenerse en cuenta, que
existirn prdidas por rozamiento, por efecto del aire y prdidas elctricas
dependientes de la carga en el generador por lo que la medida no es muy
precisa. Esto hace que sea mucho ms comn medir la potencia del motor
indirectamenteatravs del par motor. [3]
2.1.1.4Frenos decorrientecontina. Igual que en los frenos hidrulicos, el
estator poseeun montajebasculantey est unido aun sistema demedida de
fuerza. El par motor setransmitedel rotor (inducido) al estator (inductor en
anillo) por medio del campo magntico.
La regulacin dela carga, cuando las variaciones no son demasiado grandes,
puede ser hecha variando la excitacin de la dnamo con un restato.
Haciendo crecer lareaccin electromagnticaentreel rotor y el estator, efecto
que trasmite el par del rotor al estator, aumenta la carga resistente y
viceversa. La corriente producida puede ser disipada en forma de calor en
unasresistencias elctricas.
La regulacin de la excitacin de las dos mquinas de corriente continua
puede efectuarsepor medio de restatos: uno vara laexcitacin del motor y
por tanto latensin de los extremos del inducido deladnamo-freno, el otro
vara laexcitacin de la dnamo-freno.
Este tipo de dnamo-freno presenta la gran ventaja de poder ser usado
tambin como motor elctrico y puede servir no slo como arrancador del
motor, sino tambin como medio para arrastrarlo, una vez suprimido el
encendido y medir directamente la potencia necesaria para vencer los
rozamientos. En estecaso el alternador acta como asncrono, accionando un
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
14
generador de c.c.), que alimenta a la dnamo-freno, que ahora acta como
motor.
Las pruebas principales son las que sirven para obtener los valores relativos
al par motor, la presin media efectiva, la potencia desarrollada, el consumo
especfico de combustible, los diferentes rendimientos as como la
composicin de losgases deescape. [3]
Todos los motores denuevo proyecto (prototipos) son sometidos auna larga
serie depruebas experimentales, hastaalcanzar laspresiones previstas.
Para ensayar un motor es necesario instalarlo en un banco de pruebas o de
ensayos. A continuacin sepresentan algunas recomendaciones paraun buen
montaje:
1)Unacimentacinqueabsorba las vibracionesqueseproducendebidoala
existencia en el motor de fuerzas de inercia no equilibradas y de los
correspondientesmomentos resultantes.
2)Bancada, cuyamisin essoportar el motor.
3) Soportes para montar y fijar el motor en labancada, as como regular la
alturay alinear el motor con el freno.
4) Frenodinamomtrico queabsorba la potencia desarrollada por el motor,
ofreciendo una resistencia al giro de ste, y que est provisto de un
dispositivoparamedir el par motor.
5) Transmisin que permita la conexin freno-motor con una cierta
elasticidad y capacidad deabsorber desalineaciones.
6) Sistemadealimentacin decombustible al motor con instrumentos de
medicin deconsumo.
7)Sistema derefrigeracin del motor:
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
15
- Si los motores son refrigerados por agua, normalmente se mantiene la
bomba de agua del propio motor. Esta impulsa el agua a travs del motor
hacia un intercambiador de calor (agua/ agua o aire/ aire), en general con
regulacin termosttica por medio de vlvulas motorizadas. En instalaciones
ms econmicas sesuelerecurrir aun depsito demezclaen dondeseaade
unapequeacantidad deaguafraa lacaliente, queproviene del motor.
- Si los motores son refrigerados por aire se suele utilizar una soplante
dirigidahacia lasaletas del motor.
8)Sistema derefrigeracin deaceite.
En ocasiones tambin serefrigerael aceitedel motor, yaqueal no existir una
corriente de aire al crter, ste tiendea sobrecalentarse. El sistemaconsta de
un intercambiador aceite/ aguay en ocasiones unabombaauxiliar.
9)Red deagua.
Los frenos dinamomtricos transforman toda laenergamecnicaquereciben
del motor en calor. Estecalor es eliminado por el sistemaderefrigeracin del
frenoquesueleser medianteun abastecimiento continuo deagua.
En los frenos hidrulicos se ha de mantener la presin del agua dentro de
unos lmites, ya quepor ser el aguael elemento frenante, cualquier variacin
de presin provocara una variacin en el par resistente y por tanto una
variacin en lamedida
El aguasecalientaasu paso por el freno y en algunos casos sesueleemplear
un circuito cerrado, enfrindoseel aguaen unatorre derefrigeracin.
10)Sistema deevacuacin delosgases deescape.
Losgases deescapeson enviadostras pasar por un silenciador a laatmsfera.
11) Sistemadeventilacindelasala. Debeevitar el sobrecalentamiento del
local por la radiacin de calor del motor. Se efecta mediante ventiladores
axialeso centrfugos de impulsin y extraccin.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
16
Cuando el banco se instala en una habitacin o cmara cerrada y aislada se
habla de una celda o cabina de ensayo de motores. En este caso existe un
pupitre de instrumentos en el exterior dela celda con los rganos de puesta
en marcha y de gobierno del motor y freno, as como los instrumentos de
control y registro.
2.1.1.5 Dinammetros de rodillos. En este mtodo se simulan condiciones
reales de funcionamiento y tienen las siguientes caractersticas durante su
aplicacin:
Pruebas bajocarga
Inclinacin y pendiente
Resistenciaaerodinmica
Resistenciaa larodadura.
En la figura 2.2 se puede observar un dinammetro de rodillos, del cual se
mencionaron anteriormente sus ventajas, pero su costo es muy alto, en la
figura2.3semuestrael esquema deeste dinammetro.
Figura2.2Dinammetro derodillos
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
17
Figura2.3 Esquema deun dinammetro derodillos.
2.2. MTODOSINDIRECTOS
Dentro de los mtodos indirectos se encuentra el mtodo mediante la
aceleracin libre, y es el que vamos se emplear en el desarrollo de la
investigacin.
Estos mtodostienen las siguientescaractersticas:
Son debajocosto.
Son verstilesen cuantoamanejo, comparadoscon los dinammetros.
Determinantorquey potenciacon algunaimprecisin, al ser evaluados
sin la presencia de carga alguna, diferente a las producidas por
prdidasmecnicas inherentesal motor.
Se dejan sin carga estabilizndose la temperatura del motor en un
rango entre los82y 98C. [5]
Lamedicin de lapotenciamediante laprueba deaceleracin libresebasaen
que la potencia producida por el motor durante la aceleracin sin carga es
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
18
proporcional a la aceleracin angular del mismo (o). La constante de
proporcionalidad esel momento de inercia del conjunto del motor (I).
- = I M
e
El procedimiento consiste en acelerar a plenos gases (acelerar hasta llegar al
tope del acelerador) y medir la aceleracin angular del motor mediante el
tiempo requerido parapasar deun rgimen degiro inferior aotro superior.
El momento deinercia (I) es necesario estimarlo apartir demotores en buen
estado, debido a que no es conocido de antemano, y generalmente no es
suministrado por el fabricantey experimentalmentemedirlo con exactitud es
muy costoso. Si se mide la deceleracin del motor se pueden calcular las
prdidasmecnicas del motor y por lotanto, lapotencia indicada[5].
2.2.1. Variables amedir. Las variables que se van a medir son la velocidad
angular y el momento de inercia del motor; este ltimo se estima
empricamente como se haba mencionado anteriormente, y ya con estas
variables calculamos los valores de potencia y torqueapartir dela ecuacin
de la dinmica del motor.
De la dinmica del motor sabemosque:
dt
d
I M
e
=
dt
d
I M P
e
- - = - =
(3)
(4)
(5)
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
19
Donde Es lavelocidad angular medidaen lasalida del cigeal del motor,
la derivada
dt
d
, la vamos a tomar como
1 2
1 2
t t
, entre dos valores de
rgimen del motor y el valor de que multiplica a lado y lado la primera
ecuacin, es el promedio de las dos lecturas tomadas 1 y 2
respectivamente
2
2 1
+
.
I =Es el momento de inercia del motor; durante el clculo de potencia y
torquevamos aasumir quees un valor constante, el cual lo vamos acalcular
experimentalmente, medianteun procedimiento de prueba y error (teniendo
en cuenta que para cada motor es diferente dependiendo de su geometra),
comparando la potencia y torque real, del motor Diesel, a diferentes valores
de , y tomandounavalor promedio.
e
M Esel momento efectivo otorque del motor.
P Es lapotenciaefectiva del motor.
2.3 MODELO MATEMTICO EMPRICO PARA CALCULAR EL
TORQUE Y LA POTENCIA PARA UN MOTOR ALTERNATIVO DE
COMBUSTININTERNA
Este modelo matemtico es producto de varias pruebas realizadas a un gran
nmero demotores Diesel. Estemodelo matemticoes degran ayudacuando
desconocemos los datos depotenciay torquedel fabricante, paracompararlos
con los de latcnicapropuestaen estemodelo de laaceleracin libre.
Segn ZHELESKO, en su libro Fundamentos de la teora y dinmica de
motores paraautomvilesy tractores, muestra lassiguientesecuaciones. [4]
Para lapotencia:
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
20
(
(
|
|
.
|
\
|
- + - - =
2
max
33 . 1 87 . 0
N N N
e e
n
n
n
n
n
n
N N j KW
Donde
e
N Potenciaen funcin de lavelocidad angular del motor j Kw
max e
N Potenciamxima del motorj Kw
n Variacin de lavelocidad angularj rpm
N
n Velocidad angular del motor a lamximapotenciaefectivaominal j rpm .
En este proyecto se realiza una simulacin en Excel, tomando en cuenta la
ecuacin6.
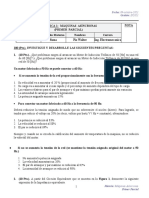
Figura2.4. Grfica depotenciaen funcin de lavelocidad angular, segn la
ecuacin 5; potenciaen Kw. y velocidad angular en rpm.
(6)
potencia vs rpm
0
10
20
30
40
50
60
1
0
0
5
0
0
9
0
0
1
3
0
0
1
7
0
0
2
1
0
0
2
5
0
0
2
9
0
0
3
3
0
0
rpm
p
o
t
e
n
c
i
a
potencia
[Kw.]
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
21
En lafiguraanterior sepuedever que lapotenciamximase daa2750RPM y
su valor es de50Kw.
Parael torque:
n
N
T
e
- = 9550 j m N -
Donde
T =Torque del motor en funcin de las rpm del motor j m N -
e
N =Potenciaenfuncin de lavelocidad angular del motor j Kw
n =Variacin de lavelocidad angularj rpm
Figura2.5. Grfica detorqueenfuncin de lavelocidad angular, segn la
ecuacin6; torqueen N-my velocidad angular en rpm.
Torque vs rpm
0
50
100
150
200
250
300
1
0
0
5
0
0
9
0
0
1
3
0
0
1
7
0
0
2
1
0
0
2
5
0
0
2
9
0
0
3
3
0
0
rpm
Torque
(7)
[N m]
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
22
En lafigura2.5sepuedever queel mximo torquese daa1500RPM y su
valor es250 N-m.
Como se mencion anteriormente stos modelos matemticos fueron el
resultado demuchas pruebas experimentales en motores Diesel y a gasolina
por investigadores rusos, y estas ecuaciones estn grficadas en Excel, para
mostrar el comportamiento caracterstico de lapotenciay el par, son degran
ayuda cuando el fabricante solo nos da la potencia mxima a su rgimen
respectivo. Es de notar que este modelo experimental, tiene implcito un
porcentajede error al ser unaaproximacin y al tener diferentes condiciones
deoperacin del motor, yaqueestas pruebas fueron con carga, acondiciones
de temperatura diferentes, lo que hace impreciso el resultado.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
23
3. CADENA DEMEDICIN
Para el desarrollo de la tcnica se utilizaron, sensores develocidad angular,
unafuentedealimentacin, un bloqueconector, unatarjeta deadquisicin de
datosy uncomputador porttil, en lafigurasepuedeapreciar unesquemade
la instrumentacin empleada, en laejecucin de latcnica.
Figura3.1 Esquema de la instrumentacin utilizadaen latcnica de la
aceleracin libre.
3.1. SENSORES PARA MEDIR LA VELOCIDAD ANGULAR
Los sensores son tan diversos como los principios fsicos en los quesebasan.
En la actualidad para medir cualquier variable fsica en un motor de
combustin interna existen diversos tipos de sensores, con sus ventajas y
desventajas. Lossensoresms comunesy conocidossonlosdeproximidad de
tipo inductivo, capacitivoo fotoelctrico.
Sensor de
velocidad
angular
Alimentacin
del sensor
Tarjetade
adquisicin
Softwarey PC
Sistemade
acondiciona
miento de
seal
Sistemade
adquisicin
Tratamiento
dedatos
Sensor
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
24
3.1.1. Sensores inductivos. Los sensores inductivos consisten en una bobina
cuya frecuencia deoscilacin cambia al ser aproximado un objeto metlico a
su superficie axial. Esta frecuencia es empleada en un circuito electrnico
para conectar o desconectar un elemento. Si el objeto metlico seapartadela
bobina, la oscilacin vuelve a empezar y el mecanismo recupera su estado
original.
Estos sensores pueden ser deconstruccin metlicaparasu mayor proteccin
y pueden tener formas anular, de tornillo, cuadrada, tamao interruptor de
lmite, etc.
Figura3.2Sensor inductivo ref. GS1012. utilizadoen laspruebas de
velocidad.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
25
Adems, por su funcionamiento pueden ser del tipo empotrable al ras en
acero o, del tipo no empotrable. Los del tipo no empotrable se caracterizan
por su mayor alcance de deteccin, de aproximadamente el doble,
comparadoscon losempotrables.
Elctricamente se especifican por el voltaje al que trabajan (5-24V DC, 90-
130V AC, etc.) y por el tipo de circuito en el que trabajan (dos hilos, PNP,
NPN, 4hilos, etc.).
3.1.2. Sensores fotoelctricos. Estos sensores son muy usados para
aplicaciones en vehculos ya que reemplazan los dispositivos mecnicos por
un rayo deluz quepuedeser usado en distancias demenos de20m.m. hasta
varioscentmetros, deacuerdocon los lentespticosempleados.
Funcionan con unafuente de luz queva desdeel tipo incandescente, hastalos
diodos emisores de luz (LED), y operan al detectar un cambio en la luz
recibidapor el fotodetector.
Los fotodetectores son tpicamentefotodiodosofototransistores, inclinndose
los fabricantes por los primeros por su insensibilidad a campos de
radiofrecuencia, quepodran causar interferencia.
Algunos modelos de estos sensores son fabricados con inmunidad a la luz
solar incidente o reflejada. Para ello emplean haces de luz modulada que
nicamentepueden ser detectados por receptoressintonizadosa lafrecuencia
demodulacin.
3.1.3. Sensor deefecto Hall paramedicin deR.P.M. Es un sensor del tipo
captador magnticoacoplado al volante del motor. Enviarpulsosdigitalesal
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
ser acercadoa los dientesmagnetizados del volanteoal colocar un imn en el
punto muerto superior si los dientes no estn magnetizados. Su funcin es
informar a la unidad de control electrnico la velocidad a la que va
circulando el eje del cigeal del motor.
3.1.4. Seleccindel sensor. El sensor deefecto Hall fueel sensor quemejores
resultados mostr, ya que el inductivo present problemas en cuanto a la
proximidad y esto implicaba discontinuidades en la medicin y el sensor
fotoelctrico present problemas con el haz deluz, pues stedivergamucho
y buscar el lenteapropiado esmuy complicado.
Figura3.3Forma deonda desalida desensor Hall paramedir RPM acoplado
aun volante deun motor Kia diesel
El sensor deefecto Hall contar siemprecon unaalimentacin deenerga. Es
un cristal que al ser atravesado por lneas de fuerza genera una pequea
tensin, activando un transistor que permite enviar una seal con la energa
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
de alimentacin. En la figura 3.3 se observa la onda que da referencia al
sensor deefecto Hall paramedir lavelocidad angular en unaMCIA.
Figura3.4 Sensor deefecto Hall ref. GS1001-1004, utilizadopara lamedicin
develocidad angular y punto muerto superior.
En todos los sensores de efecto Hall se vern tres conexiones: masa, seal y
alimentacin, por lo tanto para probarlos se conecta el positivo del
multmetro en la conexin de salida de seal, el negativo a masa, y se
alimentaen un rango de5a24V DC. En lafigura3.4seobserva dichosensor.
3.2. DISEO E IMPLEMENTACIN DEL SISTEMA DE
ACONDICIONAMIENTODE LA SEAL
El acondicionamiento de seales es una parte fundamental de todo sistema
de instrumentacin automotriz y seencarga de transformar todas las seales
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
elctricas desdequesalen de lostransductoresacopladosal motor Diesel para
ser tratados y llevadas posteriormente al equipo de registro y visualizacin.
Las seales elctricas generadaspor los transductores depresin, aceleracin,
temperatura, velocidad, CO, CO2, O2, deben ser optimizadas paralos rangos
de entrada de la tarjeta de adquisicin de datos. Los mdulos de
acondicionamiento para estas seales pueden amplificar los niveles de
voltaje, aislar, multiplexar y filtrar las seales de forma ms exacta, adems
algunostransductoresrequierenexcitacin devoltajeocorrienteparagenerar
un voltajedesalidaquepuedaser digitalizado por el sistemadeadquisicin
de datos. Las caractersticas de los transductores definen muchos de los
requerimientos del acondicionamiento de seales de un sistema de
adquisicin de datos.
Debido a que la mayora de transductores de presin, aceleracin,
temperatura y velocidad no se encuentran en el rango de trabajo de los
sistemas digitales, 0 a 5Vdc, se hace necesario el acondicionamiento de sus
seales. Este acondicionamiento incluye tambin una etapa de aislamiento
paralas termocuplas parabrindar mayor seguridad al sistema, paraeliminar
los ruidos que se generan cuando los elementos de medicin entran en
contactocon el motor.
A continuacin se describen los diferentes circuitos de acondicionamiento y
aislamiento utilizados para los diferentes sensores en el equipo prototipo
DiagmaD-100.
3.2.1. Acondicionamientodesensoresdevelocidad. Monitorear y controlar
la velocidad de giro es importanteen muchas aplicaciones dediagnstico de
motores decombustin interna. Un tacmetro midelacantidad derotaciones
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
de un eje en una unidad detiempo. La medicin normalmentees expresada
enrevolucionespor minuto (RPM).
Figura3.5. Esquema de lamedicin develocidad en el motor (gasolina).
Existen diversos sensores y metodologas para llevar a cabo esta labor, por
ejemplo, un interruptor ptico reflexivo puede abrirse y cerrarse
suficientementerpido como parapoder contar franjas deunacintareflectiva
en el eje del volante de un motor Diesel. Contar la cantidad de activaciones
duranteunacantidad conocidadetiempo proveesuficienteinformacin para
calcular las RPM.
3.2.1.1. Sensor develocidad de efecto Hall. El voltaje de salida del sensor
GS1001es proporcional al campo magntico aplicado perpendicularmente al
encapsulado. El sensor combinaunaceldaHall integraday unacircuitera de
amplificacin y acondicionamiento para minimizar variaciones de
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
temperatura asociadas con la celda Hall. La arquitectura del sensor permite
suficiente versatilidad para aplicaciones de medicin de velocidad angular
con un mnimo de componentes asociados. El sensor esta diseado para
trabajar desde 4.5Vdc hasta 24Vdc. Este sensor esta especialmente diseado
para ambientes hostiles como los encontrados en aplicaciones automotrices,
posee capacidades de alta rapidez de conmutacin y es inmune a descargas
electrostticas, transitorioselctricos.
Su salida de voltajees totalmentedigital entre0y el voltajedealimentacin.
Se requiere de una resistencia de carga entre el voltaje de alimentacin y la
salidaparamantener un nivel por defecto parasu funcionamiento ptimo. La
figura 3.6a muestra el diagrama de bloques del sensor y sus pines de
conexin para ser acoplado al volante colocando un imn en el PMS del
mismo. La distanciamximapara detectar el paso por el imn es de4mm.
Figura3.6a. Acondicionamiento desensor develocidad deefectoHall GS1001
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
31
Figura3.6b. Acondicionamiento desensor develocidad deefecto Hall
GS1001
Lafigura3.6bmuestra laconexin de laresistencia decargadeatraccinpara
setear un nivel lgico de referencia para iniciar la medicin de rpm. Este
sensor es detipo incremental y su resolucin es de1pulso por vuelta. Seusa
en conjunto con otro sensor inductivo de mayor resolucin para saber la
referencia del paso del volantepor el punto muertosuperior PMS.
3.2.1.2. Sensor de velocidad inductivo. Se puede considerar como un
codificador incremental. Consiste de un imn permanente rodeado por una
bobinaexploradora. El volantequeestagirando poseeunos dientes deforma
quela variacin deentrehierro entreel captador y la rueda dentadaproduce
una variacin en lareluctanciadel circuito magntico demodo quesegenera
una tensin elctrica en los terminales de la bobina de frecuencia
proporcional al nmero de dientes y a la velocidad de rotacin. Entre ms
nmero dedientes del volantemayor serlaresolucin delas mediciones. El
sensor inductivo utilizado es el PR5 el cual posee una salida totalmente
digital entre un valor de cero y el voltaje de alimentacin. La distancia
mxima entreel volantey el sensor acoplado en el volanteno puedeexceder
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
los 5m.m. paramantener laintegridad delas mediciones derpmen el motor
diesel. La figura 3.7 muestra el circuito de acondicionamiento del sensor
inductivo paramedir rpm.
Figura3.7. Acondicionamiento desensor develocidad InductivoAutonics
PR5
3.2.1.3. Sensor de velocidad fotoelctrico reflexivo. El funcionamiento del
circuito de acondicionamiento para un sensor fotoelctrico reflexivo se basa
en emitir una rfaga de seales luminosas infrarrojas las cuales al rebotar
contraunacintareflectivaacopladaen el punto muerto superior del volanteo
cualquier otra parte del motor Diesel que gire a la misma velocidad del eje
del cigeal, son recibidas por el sensor fotoelctrico reflexivo IS471 de
Sharp. Al ser recibidos los fotones de luz reflejados, el sistema detecta
proximidad y envaun pulso desalida.
El circuito integrado IS471cumplecon las necesidades de estediseo. Tanto
el led (diodo emisor de luz) transmisor del chorro de luz como el sensor
receptor de luz debern estar situados con unidades de enfoque adecuadas
para mejorar el alcance.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
33
Con simples reflectores de LED's se pueden obtener alcances del orden de
algunoscms. Con lentes convergentessepueden cubrir distanciasmayores.
La alimentacin de este circuito puede ser cualquier tensin comprendida
entre 5 y 15 volts. EL circuito posee un transistor trabajando en corte y
saturacin para permitir que la amplificacin del haz de luz del led emisor.
Laresolucin del sensor fotoelctrico es deun pulsopor vueltay puedeservir
como seal de referencia para detectar el punto muerto superior del primer
cilindro del motor Diesel.
Figura3.8. Acondicionamiento desensor fotoelctricoreflexivo IS471
3.2.2. Conversin frecuencia voltaje para sensores de velocidad. Los
convertidores frecuencia a voltaje estn disponibles en un gran nmero de
aplicaciones pero requieren decomponentes adicionales paraquepuedan ser
usados en unaaplicacin especfica. El conversor frecuenciaavoltaje LM2917
proporcionaunasalidadevoltajela cual es proporcional aunafrecuenciade
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
34
entradalogrando un voltajecero aunafrecuenciacero. Laentradapuedeser
referenciada a tierra y este dispositivo esta diseado para trabajar con una
fuente de hasta 28Vdc. El sensor incluye tres componentes bsicos: un
amplificador de entrada con histresis, una bomba de carga de conversin
frecuencia a voltaje, y un verstil comparador con un amplificador
operacional interno. Este dispositivo vieneencapsulado de14pines.
Figura3.9. Circuito conversor Frecuenciavoltajecon LM2917
La figura 3.9 muestra la aplicacin mas utilizada con este conversor
frecuencia a voltajey consisteen conectar un sensor develocidad digital que
permita la salida de una seal digital proporcional a las revoluciones del
motor. La seal de voltaje de salida es proporcional a la frecuencia de
rotacin del volante del motor. Si el motor presenta fallas de combustin o
compresin la variacin de la velocidad angular del motor hace que la
frecuencia comience a fluctuar lo que setraduceen pequeas variaciones en
la seal de voltaje de salida las cuales sirven para inferir el diagnstico del
motor.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
35
3.2.3. Acondicionamientodesensor decorrienteHall. Debido alafuerzade
Lorentz, las partculas cargadas en un hilo conductor estn sometidas a una
fuerza debido al campo magntico, que tiende a desplazarlas hacia un lado
del conductor. A este desplazamiento de las cargasse denominaefecto Hall.
Este desplazamiento de cargas va a producir a su vez un campo
electrosttico, que va a tender a anular el efecto del campo magntico, es
decir, las cargas se van a desplazar hasta que la fuerza debida al campo
electrostticoy lafuerza de Lorentz seanulen.
vB E
qvB qE
=
=
La diferencia depotencial quesegeneraentre los lados del conductor es
vBd Ed V
H
= =
dondedes el ancho del conductor.
Figura3.10. Circuito deacondicionamiento parasensor decorrienteHall
L01Z300S.
(8)
(9)
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
36
Se puede usar este efecto para medir campos magnticos (sonda Hall), a
partir delarelacin del potencial entrelos lados deun cableconductor en un
campo magnticoconocido y en otro quequeremosmedir.
La ventajadeestetipo desensores es el bajo consumo depotencia, el tamao
reducido del mdulo de acondicionamiento, y las perdidas de insercin son
despreciables; adems las sobrecorrientes no causan daos al dispositivo.
Estesensor decorrienteHall trabajacon un voltaje de5Vdcen rangosde1A a
300 A. Este sensor produce una seal de salida que es la representacin
instantnea de lacorrientemedidaal arranque del motor decombustin.
3.3. DISEODE LASFUENTESDEALIMENTACINDEDC PARA LOS
MDULOSDEACONDICIONAMIENTO
El diseo de las fuentes dealimentacines degran importanciaparatener un
ptimo acondicionamiento y una seal ms confiable. En la figura 3.11 se
muestra un esquema del diagrama de bloques de la tarjeta fuente de
alimentacin.
Figura3.11. Diagrama debloques de latarjetafuente dealimentacin
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
37
En el diagrama de bloques de la Figura 3.11, se muestra la tarjeta fuente, la
cual toma su alimentacin directamente de la red de 110-120VAC. La
descripcin decadauno de los bloques semuestraacontinuacin.
3.3.1. Reduccin detensinyaislamiento. Esteproceso es llevado acabopor
un transformador de doble derivacin con etiqueta de control central; cada
una de estas derivaciones estn, aisladas totalmente una de la otra y de la
entrada de lared deenergaelctrica. Una delas caractersticaspor lascuales
se eligi estetransformador es la seguridad queesteproporciona en caso de
cualquier sobretensin o sobrecorriente, brindndole seguridad al equipo, a
latarjeta deacondicionamiento, a latarjeta deadquisicin de datosy al PC.
Figura3.12. Esquemtico del transformador de dobleaislamiento
Adems deestaproteccin, tambin secuentacon el aislamiento quetieneel
alambre(recubrimiento) con el cual sehaceel arrollamiento de lasespiras.
El transformador presentaunarelacin deespiras110:13 detal maneraqueal
introducirle110VAC seobtieneen cada unadesus dos derivaciones 13VAC,
tensincon lacual sealimenta laetapa derectificacin.
3.3.2. Rectificadores deondacompleta. La rectificacin selogra pasando la
seal de corriente alterna obtenida anteriormente por los puentes
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
38
rectificadores, los cuales entregan un nivel de DC de aproximadamente
12,4V. Esta seal an no es ptima ya quepresentarizado el cual debeser
eliminadoposteriormente.
3.3.3. Filtrado. Laseal con rizado debefiltrarse, porquesenecesitaunaseal
con una tensin de DC claramente definida; esto para evitar problemas al
alimentar los circuitos integrados, los cuales especifican tensiones de
precisin con tolerancias demasiado pequeas. El filtro que se utiliza para
eliminar el rizado esun filtropasivo detipo capacitivo.
3.3.4. Regulacin deDC. Laseal filtradaes muy altaparaalimentar algunos
circuitos integrados por lo cual se necesita regular esta seal. Para esto se
utilizan circuitos integrados reguladores duales LM7812 y LM7912, que
ajustan latensin entregando +12V y 12VDC respectivamente. El circuito de
estafuentesemuestraen laFigura3.13.
De esta manera se disea la fuente de alimentacin, con dos salidas de
12VDC que van suministrar la potencia para alimentar la parte de
aislamiento en la tarjeta de adquisicin dedatos y el circuito quesuministra
laalimentacin de+5V (DCR0212).
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
39
Figura3.13. Fuente dealimentacin deDC para latarjeta de
acondicionamiento deseales
3.3.5. Fuente de 5VDC. Esta funcin la realiza un convertidor DC/ DC, de
referencia DCR0212 de TEXAS INSTRUMENTS, el cual es alimentado por
una de las fuentes aisladas descritas en laseccin anterior.
El convertidor suministra un nivel detensin fijo de5VDC con unacorriente
mximade400mA, paraalimentar todos los circuitos integrados queutilizan
niveles TTL.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
40
Figura3.14. Fuente de5V DC
Las razones por las cuales se utiliz este integrado dentro de la tarjeta, son
entre otras, su bajo consumo de potencia (aproximadamente2W nominales),
su bajo costo, aislamiento galvnico hasta 1000Vrms, tamao, proteccin
contracorto circuitos y sealimentacon unatensin de12VDC derivado dela
tarjetadealimentacin primaria. En laFigura3.15semuestralaarquitectura
interna del circuito integrado.
Figura3.15. Diagrama interno del conversor DCR0212
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
41
Figura3.16Diagramaesquemtico del conversor DC- DC, ref. DCR0212.
El dispositivo adems de presentar estas ventajas realiza otras operaciones
como es ladeconmutar unaseal deDC hasta 400KHz. En laFigura3.16se
muestrael diagramaesquemtico del conversor.
3.4. TARJETASDEADQUISICINDEDATOS
Las tarjetas de adquisicin dedatos seconectan directamente alos buses del
PC y permiten adquirir y procesar datos en tiempo real.
Cadatarjeta presenta funcionalidades diferentes, lo quepermiteaplicaciones
muy variadas, como podraser el conteo deeventos, lageneracin deseales
digitales desalida, o laadquisicin deseales analgicas deentrada.
Normalmenteunatarjetadeadquisicin dedatos tan solo aportalos bloques
de encaminamiento de la seal, as como la medidadeesta (con posibilidad
de amplificacin), las funciones declculo, memoriay visualizacin las tiene
querealizar la interfaz grficaa lacual estconectada latarjeta.
Una ventajaimportanteen las tarjetas deadquisicin dedatos es queseevita
la duplicidad de diferentes bloques en el instrumento y en el PC, como
pueden ser memoria o funciones de clculo. Tambin es importante la
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
42
facilidad de instalacin, de puesta en marcha y su flexibilidad de uso en
muchas aplicaciones industriales, y automotrices.
3.4.1. Tipos detarjetasenfuncin delaforma deconexin. Laforma de
conexin de latarjetaal computador puedeser por Bus ISA, BusPCI.
3.4.1.1. Bus ISA. La tarjeta se inserta en un slot ISA (de 16 bits) de la placa
base del computador. La tarjeta es, por lo tanto, interna. Es habitual en
computadores demesa.
3.4.1.2. BusPCI. Igual quelaanterior, pero seinsertaen un slot PCI (32bits)
de la placa base. Por lo tanto tambin es interna. La ventaja respecto a la
anterior es que la velocidad de transmisin de datos entre la tarjeta y el
procesador del PC es mayor por el bus PCI. Es tambin muy habitual en
computadores demesa.
3.4.1.3. Conector PCMCIA. Es un conector especial que tienen los
computadores porttiles. Sirve para conectar tarjetas para aplicaciones
diversas.
Figura3.17Tarjeta deadquisicin de datosPCMCIA ref. 6036E de Nacional
instruments.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
43
Una deestas aplicaciones son lastarjetas deadquisicin de datos. Enlafigura
3.17semuestralatarjetaPCMCIA utilizadaen el proyecto. Latransmisin de
los datosesmucho msrpidaquepor el puerto paralelo(dehechoessimilar
al bus ISA o PCI). Algunos PC industriales tambin disponen de conector
PCMCIA.
3.4.1.4. Conector PC104. Es un tipo de conector que se utiliza en PC's
industriales monoplaca. En esencia es un bus PCI, pero en un conector muy
compactoqueocupamuy poco espacio.
3.4.1.5 Bus CompactPCI. Es un bus PCI de tamao ms reducido que el
normal utilizado en algunos PC's industriales para hacer ms compacto el
equipo final. El funcionamiento es igual queel PCI normal.
3.4.1.6Puertoparalelo. En estecaso la tarjeta es externaal PC. Normalmente
vaencapsulada(en unacaja) y seconectaal puerto paralelo. El inconveniente
quetienees quela velocidad detransmisin dedatos entrelatarjeta y el PC
es muchomenor a laquesetienecon el busISA oPCI.
3.4.1.7. BusUSB. A pesar dequehan persistido desde los inicios del PC, y de
su conveniencia para multitud de aplicaciones, los puertos serie y paralelo
presentan claras limitaciones en cuanto a capacidad de expansin y
rendimiento se refiere. A mediados de los 90, un consorcio formado por
multitud de empresas -incluyendo Compaq, IBM, Microsoft, NEC, etc.-
desarroll una nueva interfaz estndar para la conexin de dispositivos
externosal PC.
Dicha interfaz, bautizada como USB (Universal Serial Bus, Bus Serie
Universal), tena como objetivo conectar perifricos relativamente lentos
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
44
(ratones, impresoras, cmaras digitales, unidades ZIP, etc.) de una forma
realmente sencilla, rpida y basada en comunicaciones serie. El xito de la
interfaz USB ha sido tal que, actualmente, resulta difcil imaginar un PC que
no disponga de al menos un puerto USB. Como prueba adicional de dicho
xito, cabedestacar queactualmentelagran mayora deperifricos existentes
en el mundo del PC estn disponibles tambin en versinUSB.
Una importantecaractersticadelos puertos USB es la sencillez con laquese
instalaun dispositivo. Tan slo hay queconectar un extremo del cableUSBal
perifrico, y el extremo opuesto se inserta directamente sobre un conector
USB, situado en la parte exterior del PC. No es necesario instalar ninguna
tarjeta adaptadora ISA o PCI, lo que ahorra multitud de esfuerzo y
problemas.
Figura3.18Tipos deconectoresUSB
El bus USB hasido concebido teniendo en mentelafilosofaPlug & Play. Por
tanto, tras conectar el dispositivo al bus USB, el sistema operativo seencarga
del resto: si el software controlador se encuentra instalado, lo emplea
directamente, y en casocontrario lo solicita. El busUSBadmitelaconexinde
hasta127 dispositivos, algo impensableusando puertos serieoparalelo. Cada
dispositivo puedetrabajar con un ancho debandadehasta6Mbps, velocidad
ms que suficiente para la mayora de perifricos. El ancho de banda total
soportado por el bus es de 12Mbps, a repartir entre todos los dispositivos
conectados (incluyendo al propio PC, que acta como dispositivo anfitrin).
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
45
De ah se deduce que si se trabaja a 6Mbps, tan slo se podr conectar un
dispositivoal bus.
Otra importante caracterstica es que los dispositivos se pueden conectar y
desconectar sin necesidad deapagar el PC (hot-swapping).
El estndar USB define dos tipos de conectores, denominados en nuestro
grfico A y B. En cuanto a terminales se refiere, las caractersticas de
ambos son totalmente anlogas. La diferencia radica en que los conectores
tipo A llevan la informacin desde los dispositivoshacia lacomputadora, y
los conectores tipo B llevan la informacin en sentido opuesto. Esta
diferenciacin evitatodaconfusin al efectuar conexiones: los conectores tipo
A irn a parar areceptculos tipo A, y lo equivalenteparalos conectores
tipo B, sin riesgo algunoarealizar conexiones incorrectas.
El bus USB permite el flujo de informacin en ambos sentidos (del PC a los
dispositivos o delos dispositivos haciael PC), lo queabreun granabanico de
posibilidades de expansin. Entre otras, es posible conectar altavoces
compatibles USB para escuchar audio procedente del PC (sin necesidad de
emplear una tarjeta de sonido) o recibir informacin del mundo fsico que
rodeaal PC medianteunatarjeta deadquisicin de datosUSB.
3.4.2. Bloque conector. Es una plataforma que consta de unos terminales,
dispuestos de tornillos para fijar los cables provenientes del
acondicionamiento del sensor, para enviar las seales a la tarjeta de
adquisicin dedatos PCMCIA, atravs del CableASSY, DAQ, tipo RC 68-68,
al computador.
PDF created with FinePrint pdfFactory Pro trial version www.pdffactory.com
S-ar putea să vă placă și
- Contabilidad General - Erly Zevallos 2011Document36 paginiContabilidad General - Erly Zevallos 2011Jorge Florez Castrejon57% (67)
- Taller de EjerciciosDocument2 paginiTaller de EjerciciosSCÎncă nu există evaluări
- Fuentes Con LM2596-LM2577Document11 paginiFuentes Con LM2596-LM2577Facundo LopezÎncă nu există evaluări
- Componentes y Módulos de La Parte de Mando EléctricoDocument31 paginiComponentes y Módulos de La Parte de Mando EléctricoRonald EstradaÎncă nu există evaluări
- Lista Materiales Nissan Egf-778Document1 paginăLista Materiales Nissan Egf-778Jorge Florez CastrejonÎncă nu există evaluări
- Transform AdoresDocument38 paginiTransform AdoresJorge Florez CastrejonÎncă nu există evaluări
- Analisis Comercial de Licor de DamascoDocument17 paginiAnalisis Comercial de Licor de DamascoJorge Florez CastrejonÎncă nu există evaluări
- Coplas Del Carnaval PDFDocument5 paginiCoplas Del Carnaval PDFJorge Florez Castrejon100% (2)
- TransformadoresDocument39 paginiTransformadoresCristian Palma ArzuagaÎncă nu există evaluări
- Cartadeunamigo PpsDocument12 paginiCartadeunamigo PpsJorge Florez CastrejonÎncă nu există evaluări
- Herramientas, Equips Auxiliars EtcDocument5 paginiHerramientas, Equips Auxiliars EtcJorge Florez CastrejonÎncă nu există evaluări
- Configuración de Una Red DomésticaDocument4 paginiConfiguración de Una Red DomésticaJorge Florez CastrejonÎncă nu există evaluări
- Historia1M WebDocument110 paginiHistoria1M WebYo Aula EducaciónÎncă nu există evaluări
- Ciencias Del Lenguaje-30-Sonidos Que Emiten Los AnimalesDocument20 paginiCiencias Del Lenguaje-30-Sonidos Que Emiten Los AnimalesJorge Florez CastrejonÎncă nu există evaluări
- Aspectos Importantes para La Elección de Motores de JaulaDocument11 paginiAspectos Importantes para La Elección de Motores de JaulaJorge Florez CastrejonÎncă nu există evaluări
- Pernos y TuercasDocument6 paginiPernos y TuercasVictor LuzurriagaÎncă nu există evaluări
- Ejemplos de Empresa ZapateriasDocument3 paginiEjemplos de Empresa ZapateriasJorge Florez CastrejonÎncă nu există evaluări
- Transform AdoresDocument38 paginiTransform AdoresJorge Florez CastrejonÎncă nu există evaluări
- Aspectos Importantes para La Elección de Motores de JaulaDocument11 paginiAspectos Importantes para La Elección de Motores de JaulaJorge Florez CastrejonÎncă nu există evaluări
- Vectores 1er ParteDocument36 paginiVectores 1er ParteJorge Florez CastrejonÎncă nu există evaluări
- Transform AdoresDocument38 paginiTransform AdoresJorge Florez CastrejonÎncă nu există evaluări
- Vectores 1er ParteDocument36 paginiVectores 1er ParteJorge Florez CastrejonÎncă nu există evaluări
- Proceso de Fabricacion de Celula FtovolttcaDocument2 paginiProceso de Fabricacion de Celula FtovolttcaJorge Florez CastrejonÎncă nu există evaluări
- Combustibles y Su Poder CalorificoDocument6 paginiCombustibles y Su Poder CalorificoJorge Florez CastrejonÎncă nu există evaluări
- Capitulo IIDocument31 paginiCapitulo IIJorge Florez CastrejonÎncă nu există evaluări
- Grado SexagesimalDocument3 paginiGrado SexagesimalJorge Florez CastrejonÎncă nu există evaluări
- NGK - Normas EuroDocument1 paginăNGK - Normas EuroJorge Florez CastrejonÎncă nu există evaluări
- NGK - Normas EuroDocument1 paginăNGK - Normas EuroJorge Florez CastrejonÎncă nu există evaluări
- Capitulo4 DesbloqueadoDocument13 paginiCapitulo4 DesbloqueadoJorge Florez CastrejonÎncă nu există evaluări
- Mendoza Ruiz Carlos Termococinas Leña RuralDocument2 paginiMendoza Ruiz Carlos Termococinas Leña RuralJorge Florez CastrejonÎncă nu există evaluări
- Proyecto de Diseño de Minicentral Hidroelectrica PucaráDocument6 paginiProyecto de Diseño de Minicentral Hidroelectrica PucaráJorge Florez CastrejonÎncă nu există evaluări
- Book de EnergiaDocument68 paginiBook de EnergiaJorge Florez CastrejonÎncă nu există evaluări
- Coordenadas Geográficas y Zona Horaria - Ciudades de PerúDocument1 paginăCoordenadas Geográficas y Zona Horaria - Ciudades de PerúJorge Florez CastrejonÎncă nu există evaluări
- Clase 4 Diodo, Circuito EquivalenteDocument21 paginiClase 4 Diodo, Circuito EquivalenteSantiago Pérez HerreraÎncă nu există evaluări
- Dispositivos de Señalización en Mando ElectromecánicoDocument10 paginiDispositivos de Señalización en Mando ElectromecánicoJONATHAN ALBERTO QUANT CASTILLOÎncă nu există evaluări
- t1 Problema 9 Grupo 21Document10 paginit1 Problema 9 Grupo 21Adrian VergaraÎncă nu există evaluări
- Cuestionario de MotoresDocument13 paginiCuestionario de MotoresBart Barto Impson50% (2)
- Guia de Discusion 2.hidraulicaDocument3 paginiGuia de Discusion 2.hidraulicaOscarÎncă nu există evaluări
- Paneles Solares Precios y CalculculosDocument7 paginiPaneles Solares Precios y CalculculosEdgar C MedÎncă nu există evaluări
- Pri 1700 V10-13 - 3512 Pgei 170050P34Document11 paginiPri 1700 V10-13 - 3512 Pgei 170050P34Argenis JimenezÎncă nu există evaluări
- Evidencia de ConocimientoDocument7 paginiEvidencia de ConocimientogiovanniAÎncă nu există evaluări
- Distribución CanónicaDocument14 paginiDistribución CanónicaAlexis QuirozÎncă nu există evaluări
- Especificaciones Cargadores Frontales CatDocument3 paginiEspecificaciones Cargadores Frontales CatDino J. Diaz100% (2)
- Taller 3 Fisica 1Document3 paginiTaller 3 Fisica 1ranikiÎncă nu există evaluări
- Problemas Resueltos de Quimica 2Document7 paginiProblemas Resueltos de Quimica 2FranciMezaÎncă nu există evaluări
- Practica 2 Presión HidrostáticaDocument3 paginiPractica 2 Presión HidrostáticaMARTIN BRYAN LEON BERNALÎncă nu există evaluări
- Adjunto 5. Checklist-Autoevalucion. ANTIVERO 19Document6 paginiAdjunto 5. Checklist-Autoevalucion. ANTIVERO 19RODRIGO FUJIHARAÎncă nu există evaluări
- Ejercicios Campos Electricos EstaticosDocument13 paginiEjercicios Campos Electricos EstaticosAiza Mónica Aponte HernándezÎncă nu există evaluări
- Presentacion Portafolio ELECTROWERKEDocument24 paginiPresentacion Portafolio ELECTROWERKErpercy01Încă nu există evaluări
- Electro Exam98 05Document32 paginiElectro Exam98 05Juan Carlos De Los Santos SantosÎncă nu există evaluări
- Formulario - Flujo Uniforme y CriticoDocument4 paginiFormulario - Flujo Uniforme y CriticoAlejandro UyenoÎncă nu există evaluări
- Total A Pagar $70.300: Boleta ElectrónicaDocument2 paginiTotal A Pagar $70.300: Boleta ElectrónicaFelipe RodriguezÎncă nu există evaluări
- Practica 1 (1er Parcial)Document15 paginiPractica 1 (1er Parcial)PIO WALTER100% (1)
- Estatica Luis EGamioDocument463 paginiEstatica Luis EGamioJose Navarro100% (1)
- Guia 2 Movimiento.v4Document8 paginiGuia 2 Movimiento.v4sandra buitagoÎncă nu există evaluări
- Ondas Longitudinales en Una Barra ElásticaDocument14 paginiOndas Longitudinales en Una Barra ElásticaLizeth TorresÎncă nu există evaluări
- Tratamiento de Estadistico de Datos y Calibracion de Un Matraz.Document5 paginiTratamiento de Estadistico de Datos y Calibracion de Un Matraz.Dave LiberatuÎncă nu există evaluări
- Anexo 2 - Formato Fase 5Document10 paginiAnexo 2 - Formato Fase 5Paula Camila Castelblanco (Jenni y Paula)Încă nu există evaluări
- Movimiento armónico amortiguado: ecuación, gráfica y resultadosDocument5 paginiMovimiento armónico amortiguado: ecuación, gráfica y resultadosAnonymous LOzb5LuÎncă nu există evaluări
- Permiso de Trabajo Múltiple (2) CINEMEXDocument5 paginiPermiso de Trabajo Múltiple (2) CINEMEXArq Omar MGÎncă nu există evaluări