S-ar putea să vă placă și
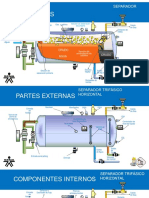
- Partes Separadores TrifasicosDocument3 paginiPartes Separadores TrifasicosSanPer86Încă nu există evaluări
- Libro Sistemas de Transmision y Trenes de RodajeDocument618 paginiLibro Sistemas de Transmision y Trenes de RodajeIg Ven100% (2)
- Examen Sobre Excavadora Sobre OrugaspdfDocument26 paginiExamen Sobre Excavadora Sobre Orugaspdfcarlos andres salazar sanchezÎncă nu există evaluări
- Informacion Tecnica - Desarenadores Cavins SandtrapDocument6 paginiInformacion Tecnica - Desarenadores Cavins SandtrapJuan Cruz PelayesÎncă nu există evaluări
- Diseño sísmico según AASHTO LRFD BridgeDocument5 paginiDiseño sísmico según AASHTO LRFD BridgeJon PruittÎncă nu există evaluări
- Hiperconjugacion DefinicionDocument2 paginiHiperconjugacion DefinicionDiego Guayacan100% (1)
- Historia de La Filosofia Sin Temor Ni Temblor - Capitulo 1Document10 paginiHistoria de La Filosofia Sin Temor Ni Temblor - Capitulo 1anlece12100% (3)
- Adverbios y DeterminantesDocument30 paginiAdverbios y DeterminantesKaren JohannaÎncă nu există evaluări
- Sustantivos y AdjetivosDocument41 paginiSustantivos y AdjetivosKaren JohannaÎncă nu există evaluări
- Marco Legal de Los Servicios PublicosDocument8 paginiMarco Legal de Los Servicios PublicosKaren JohannaÎncă nu există evaluări
- Ip TVDocument14 paginiIp TVKaren JohannaÎncă nu există evaluări
- Contaminacion Ambiental PDFDocument4 paginiContaminacion Ambiental PDFJuan Hernandez RomeroÎncă nu există evaluări
- Investigación 2Document10 paginiInvestigación 2Karen JohannaÎncă nu există evaluări
- Normas Elementos de Proteccion en La IndustriaDocument1 paginăNormas Elementos de Proteccion en La IndustriaKaren JohannaÎncă nu există evaluări
- 8 EstabilidadDocument14 pagini8 EstabilidadKaren JohannaÎncă nu există evaluări
- Normatividad para La Clasificación y Selección Del TomateDocument4 paginiNormatividad para La Clasificación y Selección Del TomateKaren JohannaÎncă nu există evaluări
- Proteccion Al ComsumidorDocument2 paginiProteccion Al ComsumidorKaren JohannaÎncă nu există evaluări
- 8 EstabilidadDocument14 pagini8 EstabilidadKaren JohannaÎncă nu există evaluări
- Bomba CalorimetricaDocument9 paginiBomba CalorimetricaGonzalo HRÎncă nu există evaluări
- Zapatas EsquineraDocument18 paginiZapatas Esquineralidia100% (2)
- Taller de Soldadura.Document15 paginiTaller de Soldadura.Juan RodríguezÎncă nu există evaluări
- Igada 2 Termodinamica UNAMDocument4 paginiIgada 2 Termodinamica UNAMAmir Flores GonzalezÎncă nu există evaluări
- Capitulo Xx. Manual de Fallas y MantenimientoDocument29 paginiCapitulo Xx. Manual de Fallas y MantenimientoL Miguel Gonzalez SanchezÎncă nu există evaluări
- AlcalinidadHuertas CassinaDocument7 paginiAlcalinidadHuertas CassinaLuis Rodrigo Sebastian Cassina PalmaÎncă nu există evaluări
- SistemasNeumáticosUniversidadTécnicaDocument18 paginiSistemasNeumáticosUniversidadTécnicaSAMIR RAFAEL GONZALEZ BURGOSÎncă nu există evaluări
- Física I: Colisiones unidimensionalesDocument24 paginiFísica I: Colisiones unidimensionalesKaren Nataly KrebsÎncă nu există evaluări
- Wa0042.Document3 paginiWa0042.Jorge TorresÎncă nu există evaluări
- Prevencion SoldaduraDocument3 paginiPrevencion SoldaduraJose Eleazar Cortez SuarezÎncă nu există evaluări
- Guía #4 - Análisis Dimensional IIDocument6 paginiGuía #4 - Análisis Dimensional IIWilmer Ramos MesaÎncă nu există evaluări
- Temple, Recocido y NormalizadoDocument9 paginiTemple, Recocido y NormalizadoGonzalo Quispe JimenezÎncă nu există evaluări
- DEFECTOLOGíA EN PROCESOS DE SOLDADURADocument17 paginiDEFECTOLOGíA EN PROCESOS DE SOLDADURAjatorres12Încă nu există evaluări
- TRABAJO 5-Trabajo - EnergíaDocument2 paginiTRABAJO 5-Trabajo - Energíajan zarasiÎncă nu există evaluări
- Trabajo Energia y PotenciaDocument10 paginiTrabajo Energia y PotenciaIvan SanchezÎncă nu există evaluări
- Informe de FisioquimicaDocument24 paginiInforme de FisioquimicaSalinas Ampudia RoqueÎncă nu există evaluări
- Razones de Flujo en Tuberías Horizontales e InclinadasDocument7 paginiRazones de Flujo en Tuberías Horizontales e InclinadasGiovanni Coleman VialesÎncă nu există evaluări
- Fricción experimentosDocument3 paginiFricción experimentosJose Alfredo Vasquez GonzalezÎncă nu există evaluări
- Membrana FosfolipidicaDocument5 paginiMembrana FosfolipidicaFernando Plata AlvaradoÎncă nu există evaluări
- Informe AlcalinidadDocument10 paginiInforme AlcalinidadKelly Evelyn TejadaÎncă nu există evaluări
- Guevara Flores Irving José-Tarea Académica 03.Document39 paginiGuevara Flores Irving José-Tarea Académica 03.WILSON EDUARDO GUEVARA VILCHEZÎncă nu există evaluări
- Movimiento parabólico de caída libreDocument28 paginiMovimiento parabólico de caída libreGerardo Manrique TelloÎncă nu există evaluări
- 5.-Aplicación Del Rendimiento Isentrópico de Toberas CompresoresDocument2 pagini5.-Aplicación Del Rendimiento Isentrópico de Toberas CompresoresWilmer DaquilemaÎncă nu există evaluări
- Características Del PetróleoDocument6 paginiCaracterísticas Del PetróleoVíctor Kevin Contreras TerezaÎncă nu există evaluări