S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- New Design of Zero Cross Correlation Codes ForDocument5 paginiNew Design of Zero Cross Correlation Codes ForSriNi VaSanÎncă nu există evaluări
- 1st Unit Medical ElectronicsDocument62 pagini1st Unit Medical ElectronicsSriNi VaSanÎncă nu există evaluări
- Reseach of Algebra Congruent CodeDocument8 paginiReseach of Algebra Congruent CodeSriNi VaSanÎncă nu există evaluări
- Unit 3 - Aca New PPT 01-08-2018Document3 paginiUnit 3 - Aca New PPT 01-08-2018SriNi VaSanÎncă nu există evaluări
- 2-D Optical Orthogonal CodesDocument11 pagini2-D Optical Orthogonal CodesSriNi VaSanÎncă nu există evaluări
- Osi Model PresentationDocument45 paginiOsi Model Presentationmuneebali445Încă nu există evaluări
- Electrically Modulated Transparent Liquid Crystal - Optical Grating ProjectionDocument10 paginiElectrically Modulated Transparent Liquid Crystal - Optical Grating ProjectionSriNi VaSanÎncă nu există evaluări
- Had Mard - PaperDocument12 paginiHad Mard - PaperSriNi VaSanÎncă nu există evaluări
- Advanced Modulation Techniques For High-Performance Computing Optical InterconnectsDocument14 paginiAdvanced Modulation Techniques For High-Performance Computing Optical InterconnectsSriNi VaSanÎncă nu există evaluări
- Fiber-Grating-Based Optical CDMA Spectral Coding With Nearly Orthogonal M-Sequence CodesDocument3 paginiFiber-Grating-Based Optical CDMA Spectral Coding With Nearly Orthogonal M-Sequence CodesSriNi VaSanÎncă nu există evaluări
- Multiplex & DemultiplexDocument56 paginiMultiplex & DemultiplexSriNi VaSanÎncă nu există evaluări
- Question Paper Code:: Reg. No.Document2 paginiQuestion Paper Code:: Reg. No.rameshkarthik1588Încă nu există evaluări
- Advanced Differential Modulation Formats For Optical Access NetworksDocument20 paginiAdvanced Differential Modulation Formats For Optical Access NetworksSriNi VaSanÎncă nu există evaluări
- 15 Area Questions With SolutionsDocument8 pagini15 Area Questions With SolutionsSriNi VaSanÎncă nu există evaluări
- Boats and Streams Problems Part 2Document6 paginiBoats and Streams Problems Part 2SriNi VaSanÎncă nu există evaluări
- New Approach For Evaluation of The Performance of Spectral Amplitude Coding-Optical Code Division Multiple Access System On High-Speed Data RateDocument8 paginiNew Approach For Evaluation of The Performance of Spectral Amplitude Coding-Optical Code Division Multiple Access System On High-Speed Data RateSriNi VaSanÎncă nu există evaluări
- Applied Electronics - 1st Semester SyllabusDocument21 paginiApplied Electronics - 1st Semester SyllabusSriNi VaSanÎncă nu există evaluări
- A Flicker Mitigation Modulation Scheme For Visible Light CommunicationsDocument4 paginiA Flicker Mitigation Modulation Scheme For Visible Light CommunicationsSriNi VaSanÎncă nu există evaluări
- Net Eng NoticeDocument1 paginăNet Eng NoticeidayacgÎncă nu există evaluări
- Stepper Motor Control Using MicrocontrollerDocument4 paginiStepper Motor Control Using MicrocontrollerkrishnnadevÎncă nu există evaluări
- AN1285Document16 paginiAN1285SriNi VaSan100% (1)
- Matlab Image ProcessingDocument63 paginiMatlab Image ProcessingNikhil DeshmukhÎncă nu există evaluări
- A.E. - FT - 25.1Document21 paginiA.E. - FT - 25.1Raja ManickamÎncă nu există evaluări
- Image Enhancement Algorithms & Techniques Point-Wise OperationsDocument29 paginiImage Enhancement Algorithms & Techniques Point-Wise OperationsSriNi VaSanÎncă nu există evaluări
- Csir Net 2013 PDFDocument8 paginiCsir Net 2013 PDFSathish KumarÎncă nu există evaluări
- Lecture 2 Current Mirror 1 - Analog Integrated CircuitsDocument12 paginiLecture 2 Current Mirror 1 - Analog Integrated CircuitsSriNi VaSanÎncă nu există evaluări
- Chapter 03 - DCCDocument61 paginiChapter 03 - DCCSriNi VaSanÎncă nu există evaluări
- Digital Systems Design Using VHDLDocument476 paginiDigital Systems Design Using VHDLImran BashaÎncă nu există evaluări
- R 2008 Ece SyllabusDocument88 paginiR 2008 Ece SyllabusSenthil KumarÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- CD4011BCDocument10 paginiCD4011BCKike DavilaÎncă nu există evaluări
- ZXV Launch Presentation - Jan, 2020Document22 paginiZXV Launch Presentation - Jan, 2020Dương Tấn TàiÎncă nu există evaluări
- Na555, Ne555, Sa555, Se555Document27 paginiNa555, Ne555, Sa555, Se555faracuvinteÎncă nu există evaluări
- Group Study - Instrumentation QuestionnaireDocument7 paginiGroup Study - Instrumentation QuestionnaireSheehan Kayne De CardoÎncă nu există evaluări
- Axl RTD V1 00 001Document11 paginiAxl RTD V1 00 001Centrala MetalaÎncă nu există evaluări
- Alarms of Ericsson Minilink CraftDocument43 paginiAlarms of Ericsson Minilink CraftShady Emad83% (12)
- Ne Waved Pa Concept PowerDocument118 paginiNe Waved Pa Concept PowerhighwtonÎncă nu există evaluări
- Multiple XingDocument30 paginiMultiple XingSadia Afrin NibhaÎncă nu există evaluări
- Level Transmitter With HART and Foundation FIELDbus ProtocolDocument210 paginiLevel Transmitter With HART and Foundation FIELDbus Protocolsko88Încă nu există evaluări
- Sonic Hub BrugermanualDocument24 paginiSonic Hub Brugermanualparamo23Încă nu există evaluări
- Standards Specifications For Instrument CablesDocument10 paginiStandards Specifications For Instrument CablesAmmar AltamimyÎncă nu există evaluări
- 09.0 PLC - SystemDocument23 pagini09.0 PLC - SystemSandoval Ramos EddyÎncă nu există evaluări
- 48W-29165-0 Using An Oscillocope and Function Generator To Measure Capacitor 4-24-2013 DPDocument5 pagini48W-29165-0 Using An Oscillocope and Function Generator To Measure Capacitor 4-24-2013 DPOnofre DanielÎncă nu există evaluări
- 3 Esp .Document6 pagini3 Esp .Mithun Singh RajputÎncă nu există evaluări
- Transformer Failures, Causes and ImpactDocument4 paginiTransformer Failures, Causes and ImpactveraÎncă nu există evaluări
- Synchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasDocument5 paginiSynchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasSatya NagendraÎncă nu există evaluări
- Alt ElixDocument5 paginiAlt ElixMary Luz QuispeÎncă nu există evaluări
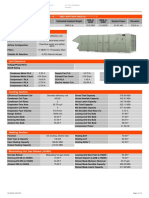
- DPS 132 Data SheetDocument2 paginiDPS 132 Data SheetClaudio Felipe NogueiraÎncă nu există evaluări
- Chapter 1Document26 paginiChapter 1ankurÎncă nu există evaluări
- Lenovo L193 Wide 19'' LCD Monitor Service ManualDocument47 paginiLenovo L193 Wide 19'' LCD Monitor Service Manualtakne_007Încă nu există evaluări
- Electrical Systems: Scope of WorksDocument4 paginiElectrical Systems: Scope of WorksSaso SaberÎncă nu există evaluări
- VOYAGER3 - TED600B4E - Consolidated Customer PackageDocument14 paginiVOYAGER3 - TED600B4E - Consolidated Customer PackageairemexÎncă nu există evaluări
- Application Note QT2160 Controller For QMatrix PDFDocument14 paginiApplication Note QT2160 Controller For QMatrix PDFdeyuuuÎncă nu există evaluări
- Minor Project SynopsisDocument3 paginiMinor Project SynopsisHappy RajputÎncă nu există evaluări
- Foundation EngineeringDocument31 paginiFoundation EngineeringkgiyerÎncă nu există evaluări
- 1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1Document4 pagini1.1 Switch Status (Transmitted) : Auxiliary Input / Output Status 1ass manÎncă nu există evaluări
- Options For Rural Electrification of Arua District: BY Onzia Joseph O6/U/043/APD/GVDocument26 paginiOptions For Rural Electrification of Arua District: BY Onzia Joseph O6/U/043/APD/GVJoseph OnziaÎncă nu există evaluări
- User Manual: 1. Important Safety InstructionsDocument3 paginiUser Manual: 1. Important Safety Instructionsdanubius05Încă nu există evaluări
- 05 REDDIG IISolutionConceptSkyWan ND SatComDocument26 pagini05 REDDIG IISolutionConceptSkyWan ND SatComybudÎncă nu există evaluări
- Assignment I-Grade 10 AdvancedDocument2 paginiAssignment I-Grade 10 Advancedmaryam abdullahÎncă nu există evaluări