S-ar putea să vă placă și
- COM - Planifica y Organiza Un Informe de InvestigaciónDocument4 paginiCOM - Planifica y Organiza Un Informe de InvestigaciónRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Uso Responsable de La Energia - Parte IIDocument5 paginiCOM - Uso Responsable de La Energia - Parte IIRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Uso Responsable de La Energia - Parte IIDocument5 paginiCOM - Uso Responsable de La Energia - Parte IIRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Tradiciones y Costumbre LimeñasDocument4 paginiCOM - Tradiciones y Costumbre LimeñasRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Las OlimpiadasDocument4 paginiLas OlimpiadasRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Escribimos El Informe de InvestigaciónDocument4 paginiCOM - Escribimos El Informe de InvestigaciónRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Tradiciones y Costumbre LimeñasDocument4 paginiCOM - Tradiciones y Costumbre LimeñasRocio Deidamia Puppi HerreraÎncă nu există evaluări
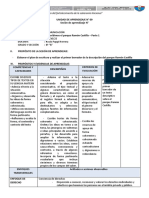
- COM - Describimos El Parque Ramón Castilla - Parte 1Document4 paginiCOM - Describimos El Parque Ramón Castilla - Parte 1Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Leeremos y Planificaremos La Elaboración de Un Triptico.Document4 paginiCOM - Leeremos y Planificaremos La Elaboración de Un Triptico.Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- Matemática Callao 6°Document9 paginiMatemática Callao 6°Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Escribimos Sobre Nuestras Vacaciones - Parte 2Document4 paginiCOM - Escribimos Sobre Nuestras Vacaciones - Parte 2Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- FRE - COMUNICACIÓN - El Castillo de NiedeckDocument3 paginiFRE - COMUNICACIÓN - El Castillo de NiedeckRocio Deidamia Puppi HerreraÎncă nu există evaluări
- COM - Tradiciones y Costumbre LimeñasDocument4 paginiCOM - Tradiciones y Costumbre LimeñasRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Catalogo MCC Allen Brayle SPDocument90 paginiCatalogo MCC Allen Brayle SPJavier MaldonadoÎncă nu există evaluări
- MAQ - 1-Analisis de Vibracion para El Mantenimiento Predictivo de MaquinariaDocument53 paginiMAQ - 1-Analisis de Vibracion para El Mantenimiento Predictivo de MaquinariaRocio Deidamia Puppi HerreraÎncă nu există evaluări
- 2500 td002 - Es PDocument38 pagini2500 td002 - Es PRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Hypervisor LabviewDocument34 paginiHypervisor LabviewRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Sistemas Hibridos LabviewDocument23 paginiSistemas Hibridos LabviewRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Taller Practico Tecnicas de Procesamiento de Imagenes para Control de CalidadDocument12 paginiTaller Practico Tecnicas de Procesamiento de Imagenes para Control de CalidadMateo QuispeÎncă nu există evaluări
- 2100 In010 - Es PDocument16 pagini2100 In010 - Es PRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Como Monitorear Sus Aplicaciones Remotas Via Web en LVDocument21 paginiComo Monitorear Sus Aplicaciones Remotas Via Web en LVsoto_aleÎncă nu există evaluări
- Rob2 Lego LabDocument23 paginiRob2 Lego LabRocio Deidamia Puppi HerreraÎncă nu există evaluări
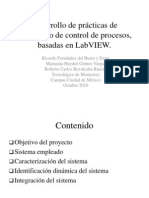
- Desarrollo de Practicas de Laboratorio de Control de Procesos Basadas en LabviewDocument21 paginiDesarrollo de Practicas de Laboratorio de Control de Procesos Basadas en LabviewAlejandro Soto AltamiranoÎncă nu există evaluări
- Rob1 Lego LabviewDocument24 paginiRob1 Lego LabviewRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Nivel Festo .Document12 paginiNivel Festo .Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- AUTOMAT Ejerciciopractico Elvis2012Document30 paginiAUTOMAT Ejerciciopractico Elvis2012Rocio Deidamia Puppi HerreraÎncă nu există evaluări
- Arquitecturas de Programacion para Sistemas MultinucleoDocument43 paginiArquitecturas de Programacion para Sistemas MultinucleoRocio Deidamia Puppi HerreraÎncă nu există evaluări
- Instrumentacion Virtual para El Mantenimiento ActivoDocument19 paginiInstrumentacion Virtual para El Mantenimiento ActivoAlejandro Soto AltamiranoÎncă nu există evaluări
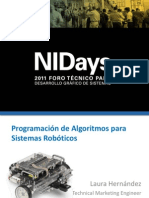
- Desarrollo de Sistemas RoboticosDocument33 paginiDesarrollo de Sistemas RoboticosAlejandro Soto AltamiranoÎncă nu există evaluări
- U2 - S5 - Ejercicios para Actividad VirtualDocument2 paginiU2 - S5 - Ejercicios para Actividad VirtualWilliam A. Salazar Carrasco50% (2)
- Guía Examen FinalDocument44 paginiGuía Examen FinalJacobo VazquezÎncă nu există evaluări
- Nivelacion9 Estadistica1PDocument7 paginiNivelacion9 Estadistica1PPaula CortesÎncă nu există evaluări
- Teorema Modificado de Castigliano1-SignedDocument25 paginiTeorema Modificado de Castigliano1-SignedCuenta Netflixilbay2Încă nu există evaluări
- HidrologiaDocument25 paginiHidrologiaPedaleros TarijaÎncă nu există evaluări
- Instrumentación Biomédica: Alvarez Lopez Alma Cristina Grupo: 1101Document12 paginiInstrumentación Biomédica: Alvarez Lopez Alma Cristina Grupo: 1101Alma Cristina Alvarez LopezÎncă nu există evaluări
- Metodos Numericos Trabajo Colaborativo 1Document17 paginiMetodos Numericos Trabajo Colaborativo 1Alexander Cruz PaezÎncă nu există evaluări
- Charles Peirce - SignoDocument18 paginiCharles Peirce - SignomartinÎncă nu există evaluări
- PancreatitisDocument13 paginiPancreatitisluis ivanÎncă nu există evaluări
- Monomios 1 EsoDocument2 paginiMonomios 1 EsoCarlos Alvarez GlezÎncă nu există evaluări
- Clasificación de Los Ángulos para Quinto de PrimariaDocument4 paginiClasificación de Los Ángulos para Quinto de PrimariaLourdes BasantesÎncă nu există evaluări
- Metodologia Fertilizantes - En.esDocument11 paginiMetodologia Fertilizantes - En.esDarwin Stephen Dardón AlvarezÎncă nu există evaluări
- Evaporador RotativoDocument3 paginiEvaporador RotativoKarol YepesÎncă nu există evaluări
- Capitulo 2 (Medida de Distancias)Document21 paginiCapitulo 2 (Medida de Distancias)RogerCárdenasÎncă nu există evaluări
- Cuestionario FinalDocument3 paginiCuestionario FinalLuis Antonio Pineda Ramirez75% (4)
- RecetasDocument33 paginiRecetasMaxi RamirezÎncă nu există evaluări
- Jorge Chávez-ELECTIVA (NEUMÄTICA) 2do CORTE 20%Document8 paginiJorge Chávez-ELECTIVA (NEUMÄTICA) 2do CORTE 20%Jorge ChávezÎncă nu există evaluări
- Actividad Caida Libre Realizada.Document3 paginiActividad Caida Libre Realizada.Dorina CardenasÎncă nu există evaluări
- Instalaciones Del EdificioDocument14 paginiInstalaciones Del EdificiopabloaraosissÎncă nu există evaluări
- Cuatro Operaciones IDocument2 paginiCuatro Operaciones IEnriqueMacoteCarhuas0% (1)
- Gráfica Solar de Proyección OrtogonalDocument16 paginiGráfica Solar de Proyección OrtogonalMarcela CalviñoÎncă nu există evaluări
- Fisher Baumann 24000sbDocument16 paginiFisher Baumann 24000sbOnofre Enriquez Fercito LeitoÎncă nu există evaluări
- Ok Ok Ok Métodos de Investigación (Eide)Document10 paginiOk Ok Ok Métodos de Investigación (Eide)Dj ViveÎncă nu există evaluări
- Cuestionario: El Tamaño y La Resistencia de Los Tubulares Que Los Arietes Pueden CizallarDocument9 paginiCuestionario: El Tamaño y La Resistencia de Los Tubulares Que Los Arietes Pueden CizallarVictoria Ramos100% (1)
- Msds Cantesco p101s A Penetrante - Removible Por Solvente EsDocument9 paginiMsds Cantesco p101s A Penetrante - Removible Por Solvente EsAngel LR0% (1)
- Practica 6 MetodosDocument4 paginiPractica 6 MetodosEfrain CuellarÎncă nu există evaluări
- Reología e HidráulicaDocument24 paginiReología e HidráulicaJulian David Rodriguez MorenoÎncă nu există evaluări
- AristotelesDocument3 paginiAristotelesMonserrat MartínezÎncă nu există evaluări
- Tipos de TransmisiónDocument1 paginăTipos de TransmisiónJosé Rincón100% (1)
- Examen Final 17 de Agosto de 2020Document2 paginiExamen Final 17 de Agosto de 2020Mafer Mabel GalarzaÎncă nu există evaluări