S-ar putea să vă placă și
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainDe la EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainÎncă nu există evaluări
- Engineering Material Specification: Not To Be Used For New DesignDocument5 paginiEngineering Material Specification: Not To Be Used For New Designjavier ortizÎncă nu există evaluări
- Guide to Load Analysis for Durability in Vehicle EngineeringDe la EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonEvaluare: 4 din 5 stele4/5 (1)
- 1 (1) - GM - Company OverviewDocument22 pagini1 (1) - GM - Company OverviewpranavÎncă nu există evaluări
- Automotive Quality Management Systems A Complete Guide - 2020 EditionDe la EverandAutomotive Quality Management Systems A Complete Guide - 2020 EditionÎncă nu există evaluări
- Procedure For Evaluation of Rubber Bushing ComponentsDocument12 paginiProcedure For Evaluation of Rubber Bushing ComponentsmarcglebÎncă nu există evaluări
- Assembly Process A Complete Guide - 2020 EditionDe la EverandAssembly Process A Complete Guide - 2020 EditionÎncă nu există evaluări
- Solution of Problems Highly Nonlinear in A Constant Speed Shaft, Using AnsysDocument12 paginiSolution of Problems Highly Nonlinear in A Constant Speed Shaft, Using AnsysmechhandbookÎncă nu există evaluări
- Analysis of Case HERO CYCLEDocument5 paginiAnalysis of Case HERO CYCLEMohit Malviya0% (1)
- Integrated Vehicle Thermal Management - Combining Fluid Loops in Electric Drive VehiclesDocument32 paginiIntegrated Vehicle Thermal Management - Combining Fluid Loops in Electric Drive VehiclesAiman NasirÎncă nu există evaluări
- Computer-Aided Casting Design and Simulation PDFDocument9 paginiComputer-Aided Casting Design and Simulation PDFmonish KrishnaÎncă nu există evaluări
- Production of Car Seat Cushion Using Palm OilDocument25 paginiProduction of Car Seat Cushion Using Palm OilSeiswaran PandeinÎncă nu există evaluări
- Types of PlasticsDocument26 paginiTypes of PlasticsPRANJAL KUMARÎncă nu există evaluări
- Acw 0219Document2 paginiAcw 0219anna_malai078351Încă nu există evaluări
- RCAR Bumper Barrier Model For RCAR Structural TestDocument8 paginiRCAR Bumper Barrier Model For RCAR Structural Testtrev3rÎncă nu există evaluări
- Study Concerning The Ball Joint Functionality of A Vehicle Steering SystemDocument6 paginiStudy Concerning The Ball Joint Functionality of A Vehicle Steering SystemnicusorbarÎncă nu există evaluări
- HPDC Vs LPDC PDFDocument28 paginiHPDC Vs LPDC PDFashokjkhannaÎncă nu există evaluări
- 23) E-00-0800 - General Test Methods For Cold Impact Behavior On Automotive PlasoDocument5 pagini23) E-00-0800 - General Test Methods For Cold Impact Behavior On Automotive PlasoShyam MehtaÎncă nu există evaluări
- Plastic WeldingDocument13 paginiPlastic Weldingakshay tapkirÎncă nu există evaluări
- Mil STD 276Document9 paginiMil STD 276D_D_76Încă nu există evaluări
- Concentrate Solar Energy by MirrorsDocument8 paginiConcentrate Solar Energy by MirrorsAsad Iqbal100% (1)
- WP Fatigue Life Prediction in Composite MaterialsDocument11 paginiWP Fatigue Life Prediction in Composite Materialsessa527Încă nu există evaluări
- Five Steps To Improve ProductivityDocument2 paginiFive Steps To Improve ProductivityManojÎncă nu există evaluări
- ftm25 NewDocument3 paginiftm25 NewCarlos Jorge Julio Llerena Pulido100% (2)
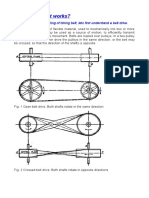
- How Timing Belt WorksDocument7 paginiHow Timing Belt WorksParas ThakurÎncă nu există evaluări
- Battery Thermal Management in EVs and HEVsDocument10 paginiBattery Thermal Management in EVs and HEVsSant NientÎncă nu există evaluări
- Vehicle Body Engineering: Body Terminology, Visibility & SpaceDocument36 paginiVehicle Body Engineering: Body Terminology, Visibility & SpaceB. selvababuÎncă nu există evaluări
- Salary GUIDE 2021Document25 paginiSalary GUIDE 2021Mohammed Aljoaib100% (1)
- Plastics Material Selection Criteria: BY N.Mohan Kumar Cipet ChennaiDocument16 paginiPlastics Material Selection Criteria: BY N.Mohan Kumar Cipet ChennaisouravÎncă nu există evaluări
- Presentation On MicrometerDocument19 paginiPresentation On MicrometerSHIJINÎncă nu există evaluări
- Key Elements Procedure 6 Corporate Social Responsibility: List of ContentsDocument12 paginiKey Elements Procedure 6 Corporate Social Responsibility: List of ContentsSrishti SharmaÎncă nu există evaluări
- Bumper BeamDocument4 paginiBumper BeamJournalNX - a Multidisciplinary Peer Reviewed JournalÎncă nu există evaluări
- Vehicle Assembly IndustryDocument87 paginiVehicle Assembly Industryroco13426ygÎncă nu există evaluări
- Optimization of Cooling-Heating System in HPDC Tools: January 2016Document9 paginiOptimization of Cooling-Heating System in HPDC Tools: January 2016MostafaÎncă nu există evaluări
- SES - Plastics Testing & CharacterizationDocument8 paginiSES - Plastics Testing & CharacterizationSES_CincinnatiÎncă nu există evaluări
- White Paper Automated Ultrasonic Inspection of Tube To Tube Sheet WeldsDocument7 paginiWhite Paper Automated Ultrasonic Inspection of Tube To Tube Sheet WeldsdanemsalÎncă nu există evaluări
- Is 1570 7Document18 paginiIs 1570 7Raj K Sharma100% (1)
- Plastics Today Extrusion Expert Webinarnb45 August 2010 v3Document30 paginiPlastics Today Extrusion Expert Webinarnb45 August 2010 v3rahul_m57Încă nu există evaluări
- 008 Selection of Alternative Material For Car Roof PanelDocument10 pagini008 Selection of Alternative Material For Car Roof PanelyasinÎncă nu există evaluări
- Forging Die Design & SimulationDocument8 paginiForging Die Design & SimulationKumar SatyamÎncă nu există evaluări
- Space Product Assurance: Manual Soldering of High-Reliability Electrical ConnectionsDocument106 paginiSpace Product Assurance: Manual Soldering of High-Reliability Electrical ConnectionsEloy Bauer EspitiaÎncă nu există evaluări
- Design FMEA 2-Day Workshop by TetrahedronDocument2 paginiDesign FMEA 2-Day Workshop by TetrahedrontetrahedronÎncă nu există evaluări
- Casting DefectDocument5 paginiCasting DefectSaurabhÎncă nu există evaluări
- Din 2304-12016-03 (E)Document1 paginăDin 2304-12016-03 (E)Ananda Widya0% (1)
- Proto Labs Whitepaper PDFDocument15 paginiProto Labs Whitepaper PDFSugarboy3 SurÎncă nu există evaluări
- Materials For MoldDocument52 paginiMaterials For MoldSnowy DoveÎncă nu există evaluări
- 17 - AHSS Forming Simulation For Shear Fracture and Edge Cracking PDFDocument37 pagini17 - AHSS Forming Simulation For Shear Fracture and Edge Cracking PDFElaine JohnsonÎncă nu există evaluări
- CableDocument296 paginiCablevinaybabaÎncă nu există evaluări
- Extruded Rubber Products, EPDM Rubber Seals Molded Rubber Components ManufacturerDocument60 paginiExtruded Rubber Products, EPDM Rubber Seals Molded Rubber Components ManufacturerKen SongÎncă nu există evaluări
- Web-Based Geometric Dimensioning and Tolerancing (GD&T) Training From James D. MeadowsDocument2 paginiWeb-Based Geometric Dimensioning and Tolerancing (GD&T) Training From James D. MeadowsJames D. Meadows & Associates, Inc.Încă nu există evaluări
- Lecture 18 - Powder MetallurgyDocument13 paginiLecture 18 - Powder MetallurgyKonark PatelÎncă nu există evaluări
- Is 14700 4 1 2008Document20 paginiIs 14700 4 1 2008Juan Pablo Villazon RichterÎncă nu există evaluări
- Auto Chassis NotesDocument70 paginiAuto Chassis NotesSrinivas NadellaÎncă nu există evaluări
- Wiper BladesDocument33 paginiWiper BladesIvanadoÎncă nu există evaluări
- M0140 (2014-N) NES: Salt Spray TestingDocument11 paginiM0140 (2014-N) NES: Salt Spray TestingBea RiveraÎncă nu există evaluări
- Powder MetallurgyDocument3 paginiPowder Metallurgysrinivas100% (1)
- V3I2IJERTV3IS21239Document5 paginiV3I2IJERTV3IS21239erwindÎncă nu există evaluări
- Benutzerhandbuch QTR Online Englische Version PDFDocument34 paginiBenutzerhandbuch QTR Online Englische Version PDFBrian BoruÎncă nu există evaluări
- Adhesive Bonding AMJT Module III Part 2Document19 paginiAdhesive Bonding AMJT Module III Part 2Arun Kattuparambil100% (1)
- Beam Reinforced Shell Structure Using OffsetsDocument12 paginiBeam Reinforced Shell Structure Using OffsetsDan WolfÎncă nu există evaluări
- Chapter 58: Coupled Advection For Heat ExchangerDocument11 paginiChapter 58: Coupled Advection For Heat ExchangerDan WolfÎncă nu există evaluări
- MD Nastran Demonstration Problems 2010Document1.347 paginiMD Nastran Demonstration Problems 2010Dan WolfÎncă nu există evaluări
- Chapter 69: Simulation of Fuel Tank FillingDocument16 paginiChapter 69: Simulation of Fuel Tank FillingDan WolfÎncă nu există evaluări
- Convection Correlations For PCBDocument12 paginiConvection Correlations For PCBDan WolfÎncă nu există evaluări
- User Defined Subroutines For Heat Transfer CoefficientDocument13 paginiUser Defined Subroutines For Heat Transfer CoefficientDan WolfÎncă nu există evaluări
- Deformable Baffle in A Duct Using OpenFSIDocument4 paginiDeformable Baffle in A Duct Using OpenFSIDan WolfÎncă nu există evaluări
- Girkmann Problem Using Axisymmetric Shell ElementsDocument9 paginiGirkmann Problem Using Axisymmetric Shell ElementsDan WolfÎncă nu există evaluări
- Impact of A Rigid On Composite Laminate Using GENOA PFA MaterialDocument7 paginiImpact of A Rigid On Composite Laminate Using GENOA PFA MaterialDan Wolf100% (1)
- Chapter 57: Heating and Convection On A Plate For Heat ExchangerDocument12 paginiChapter 57: Heating and Convection On A Plate For Heat ExchangerDan WolfÎncă nu există evaluări
- Chapter 72: Automated Bolt ModelingDocument12 paginiChapter 72: Automated Bolt ModelingDan WolfÎncă nu există evaluări
- Mar 103 Experimental Elastomer AnalysisDocument308 paginiMar 103 Experimental Elastomer AnalysisDan Wolf100% (1)
- Three-Layer Sandwich Shell Under Normal Pressure LoadingDocument6 paginiThree-Layer Sandwich Shell Under Normal Pressure LoadingDan WolfÎncă nu există evaluări
- 2-D Cylindrical Roller ContactDocument51 pagini2-D Cylindrical Roller ContactDan Wolf100% (1)
- Marc 2010 User's GuideDocument1.946 paginiMarc 2010 User's GuideDan Wolf100% (1)
- Shallow Cylindrical Shell Snap-ThroughDocument9 paginiShallow Cylindrical Shell Snap-ThroughDan WolfÎncă nu există evaluări
- Plastic Spur Gear Pair FailureDocument14 paginiPlastic Spur Gear Pair FailureDan Wolf100% (1)
- w03 Break Forming Mar101vDocument2 paginiw03 Break Forming Mar101vDan WolfÎncă nu există evaluări
- w03 Break Forming Mar101Document38 paginiw03 Break Forming Mar101Dan WolfÎncă nu există evaluări
- 3-D Sheet Metal FormingDocument15 pagini3-D Sheet Metal FormingDan WolfÎncă nu există evaluări
- Bilinear Friction Model: Sliding WedgeDocument7 paginiBilinear Friction Model: Sliding WedgeDan WolfÎncă nu există evaluări
- Laminated Strip Under Three-Point BendingDocument6 paginiLaminated Strip Under Three-Point BendingDan WolfÎncă nu există evaluări
- Wrapped Thick Cylinder Under Pressure and Thermal LoadingDocument5 paginiWrapped Thick Cylinder Under Pressure and Thermal LoadingDan WolfÎncă nu există evaluări
- Cup Forming SimulationDocument10 paginiCup Forming SimulationDan WolfÎncă nu există evaluări
- Elastic-Plastic Collapse of A Cylindrical Pipe Under External Rigid Body LoadingDocument66 paginiElastic-Plastic Collapse of A Cylindrical Pipe Under External Rigid Body LoadingDan WolfÎncă nu există evaluări
- Tube FlaringDocument7 paginiTube FlaringDan WolfÎncă nu există evaluări
- Time NVH Analysis - Chassis ExampleDocument9 paginiTime NVH Analysis - Chassis ExampleDan WolfÎncă nu există evaluări
- Double-Sided ContactDocument49 paginiDouble-Sided ContactDan WolfÎncă nu există evaluări
- Wind RoseDocument46 paginiWind RoseVijay MistryÎncă nu există evaluări
- Using Hec-Ras and Hec-Georas For River Modeling Adapted by E. Maurer, Using An Exercise by V. Merwade, Purdue UnivDocument17 paginiUsing Hec-Ras and Hec-Georas For River Modeling Adapted by E. Maurer, Using An Exercise by V. Merwade, Purdue UnivbycmÎncă nu există evaluări
- Section 1.1.2 Thermal Conductivity of A GasDocument2 paginiSection 1.1.2 Thermal Conductivity of A GasGho VinsenÎncă nu există evaluări
- SimulatedTrain Energy Consumption STECDocument20 paginiSimulatedTrain Energy Consumption STECCarlos Redondo BenitezÎncă nu există evaluări
- 4.1 Interpreting The Derivative in Context: NotesDocument2 pagini4.1 Interpreting The Derivative in Context: NotesAzra OzenÎncă nu există evaluări
- Perspective Rectangle Detection: David Shaw and Nick BarnesDocument9 paginiPerspective Rectangle Detection: David Shaw and Nick BarnesfreedownÎncă nu există evaluări
- Tenth Dimension Ebook PDFDocument227 paginiTenth Dimension Ebook PDFshit-_happens100% (5)
- Week 4 Day 4 (Lesson 11-Subtask 1)Document7 paginiWeek 4 Day 4 (Lesson 11-Subtask 1)PatzAlzateParaguyaÎncă nu există evaluări
- Lisp ProgramsDocument4 paginiLisp ProgramsAjit MoreÎncă nu există evaluări
- Final Project Part2Document3 paginiFinal Project Part2api-305255197Încă nu există evaluări
- Quimbo, Sharmaine M. (MMW-Assignment #4)Document7 paginiQuimbo, Sharmaine M. (MMW-Assignment #4)Sharmaine QuimboÎncă nu există evaluări
- Optimized Fractional-N PLL For FMCW Radar Indoor Positioning ApplicationsDocument4 paginiOptimized Fractional-N PLL For FMCW Radar Indoor Positioning ApplicationsDragan StanicÎncă nu există evaluări
- Modern Robotics, Lynch and Park, Cambridge University Press 1Document9 paginiModern Robotics, Lynch and Park, Cambridge University Press 1MOHIT KUMARÎncă nu există evaluări
- Analytic Statements Empirically Verifiable Statements: The Verification PrincipleDocument15 paginiAnalytic Statements Empirically Verifiable Statements: The Verification PrincipleCandy Concepcion PadizÎncă nu există evaluări
- Precalculus Real Mathematics Real People 7th Edition Larson Solutions ManualDocument8 paginiPrecalculus Real Mathematics Real People 7th Edition Larson Solutions ManualAndrewLopezcaydk100% (12)
- WOOFF Parametric UrbanismDocument134 paginiWOOFF Parametric UrbanismRicardo MattosÎncă nu există evaluări
- Homework and Practice Workbook Holt Middle School Math Course 2 AnswersDocument4 paginiHomework and Practice Workbook Holt Middle School Math Course 2 Answersd0t1f1wujap3100% (1)
- PMP 6 Edition Questions & Answer: Page 1 of 15Document15 paginiPMP 6 Edition Questions & Answer: Page 1 of 15Prakash SelvarajÎncă nu există evaluări
- Experimental and Numerical Investigation of Heat and Mass Transfer During Drying of Hayward Kiwi FruitsDocument8 paginiExperimental and Numerical Investigation of Heat and Mass Transfer During Drying of Hayward Kiwi Fruitsbourock26Încă nu există evaluări
- Finite Element AnalysisDocument160 paginiFinite Element AnalysisRichie Richard0% (1)
- R7211003 Electromagnetic Waves and Transmission LinesDocument1 paginăR7211003 Electromagnetic Waves and Transmission LinessivabharathamurthyÎncă nu există evaluări
- Fracture, Fatigue, Failure and Damage Evolution, Volume 3 2023Document108 paginiFracture, Fatigue, Failure and Damage Evolution, Volume 3 2023Anderson AndradeÎncă nu există evaluări
- Bahan CR 2Document19 paginiBahan CR 2Exty RikaÎncă nu există evaluări
- X +3 x+5 X +7 X+ +49 X 625: Ce Correl Algebra (C)Document3 paginiX +3 x+5 X +7 X+ +49 X 625: Ce Correl Algebra (C)Glenn Frey LayugÎncă nu există evaluări
- Math Unit Test 2Document2 paginiMath Unit Test 2divya shreeÎncă nu există evaluări
- 2.4 Calculation of Metallic Pillar (St1)Document2 pagini2.4 Calculation of Metallic Pillar (St1)Virginia Elena IordacheÎncă nu există evaluări
- Saphelp Utilities472 en 81 A0023b288dd720e10000000a114084 FramesetDocument97 paginiSaphelp Utilities472 en 81 A0023b288dd720e10000000a114084 FramesetAshish AgarwalÎncă nu există evaluări
- Answers To Worksheet On Mixing (C-Value Corrected)Document2 paginiAnswers To Worksheet On Mixing (C-Value Corrected)Franzes Mar EriaÎncă nu există evaluări
- Lab X - Building A Machine-Learning Annotator With Watson Knowledge StudioDocument27 paginiLab X - Building A Machine-Learning Annotator With Watson Knowledge StudioManoj KumarÎncă nu există evaluări
- ST4S39 Systems Thinking in Strategy FormulationDocument19 paginiST4S39 Systems Thinking in Strategy Formulationjulian100% (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsDe la EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsÎncă nu există evaluări
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®De la EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Încă nu există evaluări
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchDe la EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchEvaluare: 4 din 5 stele4/5 (10)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)De la EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Evaluare: 5 din 5 stele5/5 (2)
- A Comprehensive Guide to Video Game Design SchoolsDe la EverandA Comprehensive Guide to Video Game Design SchoolsÎncă nu există evaluări
- Autodesk Fusion 360 Black Book (V 2.0.12670) - Part 1De la EverandAutodesk Fusion 360 Black Book (V 2.0.12670) - Part 1Încă nu există evaluări
- Autodesk Fusion 360 Black Book (V 2.0.10027) - Part 2De la EverandAutodesk Fusion 360 Black Book (V 2.0.10027) - Part 2Încă nu există evaluări
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsDe la EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsÎncă nu există evaluări