S-ar putea să vă placă și
- Fast CourtsDocument6 paginiFast CourtsAmol MundeÎncă nu există evaluări
- Blogs: The Thorium Question - An Interview With India's Nuclear CzarDocument3 paginiBlogs: The Thorium Question - An Interview With India's Nuclear CzarrishikeshpandeyÎncă nu există evaluări
- Citizzens CharterDocument333 paginiCitizzens CharterrishikeshpandeyÎncă nu există evaluări
- Crypto 01Document36 paginiCrypto 01Shikha AggarwalÎncă nu există evaluări
- Wildlife Law - A Ready ReckonerDocument43 paginiWildlife Law - A Ready ReckonerToslava de YakÎncă nu există evaluări
- Banc AssuranceDocument11 paginiBanc AssurancerishikeshpandeyÎncă nu există evaluări
- Calvin and Hobbes - IntroductionDocument6 paginiCalvin and Hobbes - IntroductionDivya Krishna KumarÎncă nu există evaluări
- ELNINODocument23 paginiELNINOrishikeshpandeyÎncă nu există evaluări
- Oil ChokepointDocument4 paginiOil ChokepointrishikeshpandeyÎncă nu există evaluări
- IGNOU Poverty and Social DynamicsDocument15 paginiIGNOU Poverty and Social DynamicsrishikeshpandeyÎncă nu există evaluări
- Amendments to Judicial Standards BillDocument5 paginiAmendments to Judicial Standards BillrishikeshpandeyÎncă nu există evaluări
- Special Article On India-pakistan-Afghanistan TriangleDocument6 paginiSpecial Article On India-pakistan-Afghanistan TrianglerishikeshpandeyÎncă nu există evaluări
- Social Issues Bu Jagaran JoshDocument95 paginiSocial Issues Bu Jagaran JoshAshutosh AwasthiÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Design Process at LEGODocument5 paginiDesign Process at LEGOkapsarcÎncă nu există evaluări
- Motor Electrico Bojin J4103 - B User ManualDocument6 paginiMotor Electrico Bojin J4103 - B User ManualJordan BonnettÎncă nu există evaluări
- Exploratory Data Analysis: M. SrinathDocument19 paginiExploratory Data Analysis: M. SrinathromaÎncă nu există evaluări
- Semi Detailed Lesson Plan ElementaryDocument3 paginiSemi Detailed Lesson Plan ElementaryJinky JunioÎncă nu există evaluări
- 1 API 653 Exam Mar 2015 MemoryDocument12 pagini1 API 653 Exam Mar 2015 MemorymajidÎncă nu există evaluări
- Rha GGBS 27 4Document12 paginiRha GGBS 27 4KhaDeja MawraÎncă nu există evaluări
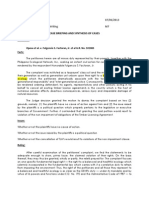
- Case Briefing and Case SynthesisDocument3 paginiCase Briefing and Case SynthesisKai RaguindinÎncă nu există evaluări
- Pump IntakeDocument6 paginiPump IntakeAnonymous CMS3dL1T100% (1)
- Pembahasan Soal UN Bahasa Inggris SMP 2012 (Paket Soal C29) PDFDocument15 paginiPembahasan Soal UN Bahasa Inggris SMP 2012 (Paket Soal C29) PDFArdi Ansyah YusufÎncă nu există evaluări
- Eports: India's Defiance of Religious Freedom: A Briefing On Anti-Conversion' LawsDocument16 paginiEports: India's Defiance of Religious Freedom: A Briefing On Anti-Conversion' LawsGabriela StevensÎncă nu există evaluări
- Laboratory SafetyDocument4 paginiLaboratory SafetyLey DoydoraÎncă nu există evaluări
- Escalado / PLC - 1 (CPU 1214C AC/DC/Rly) / Program BlocksDocument2 paginiEscalado / PLC - 1 (CPU 1214C AC/DC/Rly) / Program BlocksSegundo Angel Vasquez HuamanÎncă nu există evaluări
- Anki Very Useful ManualDocument5 paginiAnki Very Useful ManualSoundaryaÎncă nu există evaluări
- معامل الاسفلتDocument32 paginiمعامل الاسفلتMohammed AbbasÎncă nu există evaluări
- Product Differentiation and Market Segmentation As Alternative Marketing StrategiesDocument7 paginiProduct Differentiation and Market Segmentation As Alternative Marketing StrategiesCaertiMÎncă nu există evaluări
- Resp Part 4Document95 paginiResp Part 4Kristian CadaÎncă nu există evaluări
- Safety Data Sheet for Instant AdhesiveDocument6 paginiSafety Data Sheet for Instant AdhesiveDiego S. FreitasÎncă nu există evaluări
- GEd 105 Midterm ReviewerDocument17 paginiGEd 105 Midterm ReviewerAndryl MedallionÎncă nu există evaluări
- Money MBA 1Document4 paginiMoney MBA 1neaman_ahmed0% (1)
- RFID Receiver Antenna Project For 13.56 MHZ BandDocument5 paginiRFID Receiver Antenna Project For 13.56 MHZ BandJay KhandharÎncă nu există evaluări
- We Generally View Objects As Either Moving or Not MovingDocument11 paginiWe Generally View Objects As Either Moving or Not MovingMarietoni D. QueseaÎncă nu există evaluări
- Tos IcuDocument1 paginăTos IcuMary Cris RombaoaÎncă nu există evaluări
- CP R77.30 ReleaseNotesDocument18 paginiCP R77.30 ReleaseNotesnenjamsÎncă nu există evaluări
- Utilization of Wood WasteDocument14 paginiUtilization of Wood WasteSalman ShahzadÎncă nu există evaluări
- 2009 GCSE PE SpecificationsDocument225 pagini2009 GCSE PE SpecificationsAdstasticÎncă nu există evaluări
- The Ideal Structure of ZZ (Alwis)Document8 paginiThe Ideal Structure of ZZ (Alwis)yacp16761Încă nu există evaluări
- Berger Paints (India) Limited 21 QuarterUpdateDocument7 paginiBerger Paints (India) Limited 21 QuarterUpdatevikasaggarwal01Încă nu există evaluări
- Principles of CHN New UpdatedDocument4 paginiPrinciples of CHN New Updatediheart musicÎncă nu există evaluări
- Perbandingan Penggunaan Refrigeran R22 Dengan R407 Pada Performa ACDocument15 paginiPerbandingan Penggunaan Refrigeran R22 Dengan R407 Pada Performa ACYuli RahmawatiÎncă nu există evaluări
- Internal auditing multiple choice questionsDocument4 paginiInternal auditing multiple choice questionsSantos Gigantoca Jr.Încă nu există evaluări