International Journal of Scientific Research Engineering & Technology (IJSRET) Volume 2 Issue2 pp 072-075 May 2013 www.ijsret.
org ISSN 2278 0882
Path loss in Wireless Sensor Mote
Vaishali Department Electronics & Communication Engineering, IMSEC IMS Engineering College, MTU Noida vashalig@gmail.com
ABSTRACT:
The major problem encountered in wireless channel is the path loss of the channel severely attenuates the transmitted signal and sets a lower bound on the signal strength, the receiver can expect. In this paper we study about the wireless sensor mote to transfer the data at receiver point to cross the hurdles. Whenever the signals are transmitted then it is possible to cross obstructions present in between the signal transferred to receiver end. Here we study about the path loss implications (to transfer the data) with the help of wireless sensor mote. Sensor mote is so small that everyone cannot see it and it is so smart that it performs the efficient working. If there is any obstruction to catch the information, then this device is helpful to take it. Sometimes we use wireless communication to take the information at distant places and during data transfer processing, when information reaches at the receiver end, then we get some loss of information because of obstructions. This paper aims at studying path loss incurred by information during data transfer from Sensor mote to Central Receiver system. There are many questions arises in everyones mind that is it working? Now the answer is yes. Yes, it is working with the best result. Sensor motes are spread randomly in the atmosphere to catch the information. It gives us exact and original images without the loss of information. Keywords: Wireless sensor MATLAB, MEMS Technology. mote, Path loss, communicating to other devices. The major problem in wireless channel communication is path loss because of obstructions occurred in between the path followed. The path loss of the channel severally attenuates the transmitted signal and sets a lower bound on the signal strength the receiver can expect. Multipath fading does a few things. With path loss, it attenuates the transmitted signal. Attenuation introduced by multipath fading adds to the attenuation introduced by path loss. Together with AWGN (Additive White Gaussian Noise) originally present in the channel, this attenuation in the received signal strength sets a limit on the SNR required of the demodulator to achieve a certain BER. The Doppler shift introduces phase impairment to the modulated signal received under path loss condition and is another error source that can limit the achievable BER. To investigate these problems, we need to develop more complex channel models, channels having randomly time varying impulse responses. The channel model for wireless communication and its impact on receiver front end design by considering path loss in a channel.
1. INTRODUCTION
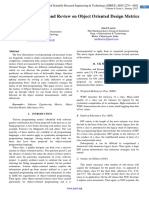
The purpose of this paper is to analyze techniques for designing wireless communication systems for millimeter scale sensing and communication known as Assembly of particles-Sensor mote. A smart mote element is a self-contained sensing and communication system that can be combined into roughly a cubic-millimeter mote to perform integrated, massively distributed sensor networks. Sensor mote can consist of hundreds to thousands of dust motes, spreads randomly, each containing the capability of sensing and monitoring environmental conditions and Figure1: Received power under path loss and multipath fading. As shown in above figure, the received powers variation in distance from the transmitter can be understood by observing its average value at a given distance from the transmitter as well as its local variation in spatial proximity to that location. Received power variation between the transmitter
IJSRET @ 2013
International Journal of Scientific Research Engineering & Technology (IJSRET) Volume 2 Issue2 pp 072-075 May 2013 www.ijsret.org ISSN 2278 0882 and receiver, there are many propagation paths and signals travelling through these different paths interfere with one another. To illustrate this, we can draw a simple picture that incorporates four of these paths. goes through path 1 at the Rx antenna. At the receive antenna, these two signals will have a phase difference between proportional to d-d. Specifically, d-d is very small compared with lambda, the wavelength of the carrier. The interference is always destructive in nature because the phase difference is small, movement of receive antenna results a small variation of received power. The reflector is due to global objects (like a hill), which move/change, the interference in nature. The interference is formed as a result of reflection due to global objects and is deterministic in nature.
Figure2: Four paths to differentiate the effect of interference caused by global and local reflectors. Multipath fading has a distinct impact on the fragility of wireless links. It is considered a smallscale phenomenon in the sense that the level of attenuation of the signal changes substantially if the position of the receiver or the transmitter is varied by about half a wavelength. One of the most common features of wireless sensor networks is the fact that the nodes are usually static; static multipath fading is therefore of particular interest. Another physical phenomenon of interest is shadowing; it is considered a large-scale effect, as it corresponds to substantial deviations of the RF signal from its mean due to large obstacles, which create shadow zones that cause deep fades if a receiver happens to enter them.
Figure3: Two paths drawn to show the effect of interference caused by global reflector. Local Reflection In this section, we focus on small-scale reflection. The signal that goes through path1 and path 2 which is redrawn in the below figure. The signal goes along path1 from the Rx antenna. A replica of this signal travels along path2. The Rx antenna bounds off a local reflector before it arrive at the Rx antenna. It interferes with the signal that travels along path 1. The received antenna is situated with respect to Tx antenna, this interference can be destructive or constructive in variation of received power. Large phase difference results large variation of received power. The interference patterns in the present case are formed as a result of reflection due to local objects and are random in nature.
2. PATH ENVIRONMENT
To classify the paths according to the reflection is based on whether they suffer from global (large) reflection or from local (small) reflection. In global reflection, paths 1 and 2 do not go through global reflection, whereas paths 3 and 4 go through such reflections. In local reflection, paths 1 and 3 do not go through local reflections, whereas paths 2 and 4 do go through such reflections. Global reflection Let the signal going through path1 (with distance between Rx and Tx antenna equal to d) will arrive at the Rx antenna directly. A replica of this signal follows path3, where it bounds off a global reflector (e.g. a hill) before it arrives at the Rx antenna (with distance between Rx and Tx antenna equal to d). There it interferes with the signal that
Figure4: Two paths to show the effect of interference caused by local reflector.
IJSRET @ 2013
International Journal of Scientific Research Engineering & Technology (IJSRET) Volume 2 Issue2 pp 072-075 May 2013 www.ijsret.org ISSN 2278 0882 Path loss: A First glance Large scale propagation is of the order of 5 to 50 .Hence this path loss is described by interference effects going on between signals propagating through paths 1,2 and paths 3,4. The path1 is line of sight (LOS) and path 3 is non-line-of-sight (NLOS). Interferences between paths 1 and 4, paths 2 and 3 and paths 2 and 4 show similar characteristics. Characteristics of the path loss include the following: 1. It involves large scale propagation in the local averaged power over a region of 5 to 50. It is a constant power over this region, with its value set equal to average. 2. Path loss is attributed to interference between paths 1, 2 and paths 3,4, we can conclude that the received power goes down as transmitter/ receiver separation increases. The effect of movement is a simple loss in signal strength received by receiver. The signal loss to first order is a simple function of distance. Path loss is due to free space propagation and reflection and also by diffraction and scattering. 3. The number of relevant path is small, boiled down to one or two. Path loss include signal loss in the received signal, which lowers the SNR and hence BER. separation between the two users decreases, the received interferences power level increases. To calculate the maximum interferences power level received by user 1 , we assume a gain LOS path which allows us to determine the maximum interference power level Pr max, the minimum separation that user 2 can be from user 1, with a NLOS path.
4. ANALYSIS
Wireless Sensor consist of hundreds to thousands of dust motes, spreads randomly, each containing the capability of sensing and monitoring environmental conditions and communicating to other devices. If there is any obstruction in between the path to be followed then it follows another path and communicates with the nearest mote and again return back to same path followed to carry the information.
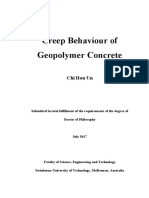
In the above figure, P1, P2 ...Pr are the inputs. W1,1....Ws,r are the paths followed by the input motes. b1...bs are the base stations. n1...ns are the processing of signals and a1, a2....as are the output results sending to the antenna.
Fig5: - Bidirectional optical communication link, for clarity, one of the many motes is shown
3. MINIMUM SEPARATION
The friis equation allows us to determine the minimum separation between users for a given interference level. Let assume, we have two users, user1 and user2. User 1 receives the power from the base station and also receives power transmitted by user 2, which acts as interference. The interference propagates from user2 to user1, following the same path loss mechanism. From the friis equation, the
The above figure shows the input layer, hidden layer (path hidden by the obstruction) and output layer.
IJSRET @ 2013
International Journal of Scientific Research Engineering & Technology (IJSRET) Volume 2 Issue2 pp 072-075 May 2013 www.ijsret.org ISSN 2278 0882 The experimental data shows the behaviour of electromagnetic field near the transmit antenna and the motes spread all over it to transfer the information. If these motes face difficulty in finding the path, then it follows another path to send the information.
5. CONCLUSION
In this paper we presented an overview of the Sensor mote and studied how the sensor mote works actually to follow the path and sends the information at the receiver end without any loss. In this paper we discussed about how the signal, message and information transfer from one mote to another mote and to the base station to receiver end. In this paper, I have discussed that at the receiver end how we can get the actual information.
ACKNOLDGEMENT:
I am thankful to faculty members of ECE department of IMSEC, Ghaziabad, Uttar Pradesh for their support during preparation of this paper.
REFERENCE
[1] V. S. Hsu, J.M. Kahn, K. S. J. Pister, Wireless Communication for Smart Dust, 1998, [2] K. S. J. Pister, J.M. Kahn, B. E. Boser, Wireless Networks of Millimeter-Scale Sensor Nodes,1998, http://robotics.eecs.berkeley.edu/~pister/SmartDust [3] Kris Pister, Smart Dust: Autonomous sensing and communication in a cubic millimeter, http://robotics.eecs.berkeley.edu/~pister/SmartDust [4] B. Warneke, B. Atwood, K. S. J. Pister, Smart Dust Mote Forerunners, Proc. IEEE Inter. Conference on MEMS, 2001. [5] E. A. Hollar, COST Dust, M. S. Thesis in UC Berkeley, 2000. [6] B. Warneke, M. Last, B. Liebowitz, K. S. J. Pister, Smart Dust: Communicating With a Cubic Millimeter Computer, IEEE, 2001. [7] J.M. Kahn, R.H. Katz, K. S. J. Pister, Next Century Challenges: Mobile Networking for SmartDust, http://robotics.eecs.berkeley.edu/~pister/SmartDus. [8] Bosco Leung, VLSI for wireless communication , Prentice hall publication. [9] J. Bachrach and C. Taylor,Localization in Sensor Networks . Wiley and Sons, 2005. [10] A. Boukerche, H. Oliveira, E. Nakamura, and A. Loureiro, Localization systems for wireless sensor networks, Wireless Communications, IEEE, vol. 14, no. 6, pp. 612, December 2007
Another figure shows the followed by the sensor mote.
complete
path
Below figure shows the obstruction occurred in between the path followed and the alternative path taken. This obstruction can be in form of hill, doors, windows or any domestic objects. It shows the various different paths followed by the mote.
IJSRET @ 2013
S-ar putea să vă placă și
- Thermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue EngineeringDocument5 paginiThermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue Engineeringijsret100% (1)
- A Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsDocument7 paginiA Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsijsretÎncă nu există evaluări
- Consruction of A Direct Solar Dryer For Perishable Farm ProductsDocument9 paginiConsruction of A Direct Solar Dryer For Perishable Farm ProductsijsretÎncă nu există evaluări
- Design and Manufacture of Carbon-Free CarDocument3 paginiDesign and Manufacture of Carbon-Free CarijsretÎncă nu există evaluări
- Comparative Study and Review On Object Oriented Design MetricsDocument4 paginiComparative Study and Review On Object Oriented Design MetricsijsretÎncă nu există evaluări
- An Approach To Bug Triage: A ReviewDocument4 paginiAn Approach To Bug Triage: A ReviewijsretÎncă nu există evaluări
- A Review On Natural Fibre Polymer CompositesDocument6 paginiA Review On Natural Fibre Polymer CompositesijsretÎncă nu există evaluări
- A Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkDocument6 paginiA Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkijsretÎncă nu există evaluări
- A Review On Data De-Duplication Techniques For Managing Data Into CloudDocument4 paginiA Review On Data De-Duplication Techniques For Managing Data Into CloudijsretÎncă nu există evaluări
- Source Identification For Anonymous Attacks With Deterministic Packet MarkingDocument4 paginiSource Identification For Anonymous Attacks With Deterministic Packet MarkingijsretÎncă nu există evaluări
- Mechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesDocument6 paginiMechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesijsretÎncă nu există evaluări
- A Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkDocument4 paginiA Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkijsretÎncă nu există evaluări
- A Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentDocument5 paginiA Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentijsretÎncă nu există evaluări
- An Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkDocument6 paginiAn Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkijsretÎncă nu există evaluări
- Solving A Decision Making Problem Using Weighted Fuzzy Soft MatrixDocument5 paginiSolving A Decision Making Problem Using Weighted Fuzzy Soft MatrixijsretÎncă nu există evaluări
- A Review On Fingerprint Detection and Recognization TechniquesDocument4 paginiA Review On Fingerprint Detection and Recognization TechniquesijsretÎncă nu există evaluări
- CHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.Document5 paginiCHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.ijsretÎncă nu există evaluări
- Echo Cancellation System in VOIP Using MATLABDocument3 paginiEcho Cancellation System in VOIP Using MATLABijsretÎncă nu există evaluări
- Experimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationDocument9 paginiExperimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationijsretÎncă nu există evaluări
- Automated Personalized Face Detection Using Viola DetectorDocument5 paginiAutomated Personalized Face Detection Using Viola DetectorijsretÎncă nu există evaluări
- A Review On Face Detection and Recognization TechniquesDocument4 paginiA Review On Face Detection and Recognization TechniquesijsretÎncă nu există evaluări
- Augmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertDocument8 paginiAugmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertijsretÎncă nu există evaluări
- Comparative Study and Review On Object Oriented Design MetricsDocument4 paginiComparative Study and Review On Object Oriented Design MetricsijsretÎncă nu există evaluări
- Comparison of Workpiece Geometry and Its Effects On ECAP Process by FEADocument5 paginiComparison of Workpiece Geometry and Its Effects On ECAP Process by FEAijsretÎncă nu există evaluări
- Numerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapDocument4 paginiNumerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapijsretÎncă nu există evaluări
- Demographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtDocument6 paginiDemographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtijsretÎncă nu există evaluări
- Blending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsDocument11 paginiBlending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsijsretÎncă nu există evaluări
- Strategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaDocument6 paginiStrategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaijsretÎncă nu există evaluări
- Content Based Image Retrieval Using Color FeatureDocument6 paginiContent Based Image Retrieval Using Color FeatureijsretÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- CA2005 User Manual 1.3-Custom-FDocument34 paginiCA2005 User Manual 1.3-Custom-FDinesh SreedharanÎncă nu există evaluări
- Ultra-Deepwater Semi-Submersible: General Description Storage CapacitiesDocument2 paginiUltra-Deepwater Semi-Submersible: General Description Storage CapacitiesFrank CloseÎncă nu există evaluări
- 1-Evidence Plan HilotDocument5 pagini1-Evidence Plan HilotJeanette Magno100% (2)
- Philip B. Crosby: Quality Guru Who Pioneered Zero Defects ConceptDocument29 paginiPhilip B. Crosby: Quality Guru Who Pioneered Zero Defects Conceptphdmaker100% (1)
- Creep Behavior of GPDocument310 paginiCreep Behavior of GPYoukhanna ZayiaÎncă nu există evaluări
- Quarter 1 - Module 1 Nature Goals and Perspectives in Anthropology Sociology and Political ScienceDocument24 paginiQuarter 1 - Module 1 Nature Goals and Perspectives in Anthropology Sociology and Political Science완83% (12)
- MATH 10 Test Questions SY 2022-2023 QIIIDocument4 paginiMATH 10 Test Questions SY 2022-2023 QIIIRYAN C. ENRIQUEZÎncă nu există evaluări
- Electric Power Distribution - Wikipedia, The Free EncyclopediaDocument3 paginiElectric Power Distribution - Wikipedia, The Free EncyclopediasacuarsÎncă nu există evaluări
- SKF TIH 240 Heater Instruction ManualDocument134 paginiSKF TIH 240 Heater Instruction ManualWei Leng tehÎncă nu există evaluări
- Installation and Tuning Guide for AEM EMS on 1990-1994 Mitsubishi EclipseDocument12 paginiInstallation and Tuning Guide for AEM EMS on 1990-1994 Mitsubishi EclipseJose AbreuÎncă nu există evaluări
- Swot TowsDocument1 paginăSwot TowsAshwiniÎncă nu există evaluări
- KVH TracPhone V7-HTS - Installation ManualDocument59 paginiKVH TracPhone V7-HTS - Installation ManualMarcelo RAÎncă nu există evaluări
- (JPP-1) - (Indefinite Integration) - 11th SepDocument52 pagini(JPP-1) - (Indefinite Integration) - 11th Sepfunnyvideos. comÎncă nu există evaluări
- English exam practice with present tensesDocument6 paginiEnglish exam practice with present tensesMichael A. OcampoÎncă nu există evaluări
- Biology Thesis by SlidesgoDocument39 paginiBiology Thesis by SlidesgoKristian Hezekiah DuyoganÎncă nu există evaluări
- Cambridge International Examinations: Additional Mathematics 4037/12 May/June 2017Document11 paginiCambridge International Examinations: Additional Mathematics 4037/12 May/June 2017Ms jennyÎncă nu există evaluări
- Arduino The Ultimate Beginners Guide To Arduino Learn How To Get Started With Arduino Programming Projects and More PDFDocument33 paginiArduino The Ultimate Beginners Guide To Arduino Learn How To Get Started With Arduino Programming Projects and More PDFefrain100% (1)
- IEEE STD 1193™-2003 Guide For Measurement of Environmental SensitivitiesDocument81 paginiIEEE STD 1193™-2003 Guide For Measurement of Environmental SensitivitiesVitalyÎncă nu există evaluări
- Arun GangwarDocument7 paginiArun GangwarArun GangwarÎncă nu există evaluări
- CPDocument29 paginiCPsandugandhiÎncă nu există evaluări
- Positronic Industries Inc. FC4012D: SK2415 ECO B 23033 TK Yk Cole ECO C 52574 Cole CM ColeDocument1 paginăPositronic Industries Inc. FC4012D: SK2415 ECO B 23033 TK Yk Cole ECO C 52574 Cole CM ColekamaveriyanÎncă nu există evaluări
- Sulo Publication FormatDocument2 paginiSulo Publication FormatJose BelenÎncă nu există evaluări
- References Edfd227 Group Assessment 2 Newsletter WebsiteDocument8 paginiReferences Edfd227 Group Assessment 2 Newsletter Websiteapi-523911286Încă nu există evaluări
- Introduction To Critical Reading SkillsDocument4 paginiIntroduction To Critical Reading SkillsParlindungan PardedeÎncă nu există evaluări
- Hpe Msa 1060/2060/2062 Storage ArraysDocument22 paginiHpe Msa 1060/2060/2062 Storage ArraysCostin RaducanuÎncă nu există evaluări
- Designing The HighwayDocument13 paginiDesigning The HighwayHugo PainenoÎncă nu există evaluări
- Forever Living ContractDocument2 paginiForever Living ContractRishi SehgalÎncă nu există evaluări
- KPMG - India's Digital Future Media and Entertainment Report 2019Document256 paginiKPMG - India's Digital Future Media and Entertainment Report 2019Online IngÎncă nu există evaluări
- Reading Process Theories: Bottom-Up Model Interactive Model Top-Down ModelDocument2 paginiReading Process Theories: Bottom-Up Model Interactive Model Top-Down ModelBeverly Panganiban CadacioÎncă nu există evaluări
- Resume HarishArchitectDocument11 paginiResume HarishArchitectharishÎncă nu există evaluări