S-ar putea să vă placă și
- Levas: funciones y clasificaciónDocument15 paginiLevas: funciones y clasificaciónHeder Haziel Alanis TorresÎncă nu există evaluări
- Calculo y Diseño de Levas (Presentacion) FFFDocument25 paginiCalculo y Diseño de Levas (Presentacion) FFFOscar Mamani Layme100% (2)
- Reglamento docencia UNDACDocument25 paginiReglamento docencia UNDACCésar Romero RivasÎncă nu există evaluări
- TIEMPO de CRECER Guia para La Familia (Unicef)Document139 paginiTIEMPO de CRECER Guia para La Familia (Unicef)Alvaro Javier Reyes Bohle100% (1)
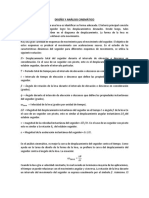
- Diseño y Análisis CinemáticoDocument10 paginiDiseño y Análisis CinemáticoLeonardo MisaelÎncă nu există evaluări
- Preparación 2PDocument13 paginiPreparación 2P201901688Carlos AjiatazÎncă nu există evaluări
- Cuestionario Unidad III Levas Ruiz MataDocument9 paginiCuestionario Unidad III Levas Ruiz MataRoberto C RuizÎncă nu există evaluări
- 12 Mecanismo INM 4Document26 pagini12 Mecanismo INM 4Sonia Maria ZapataÎncă nu există evaluări
- LEVASDocument34 paginiLEVASLeonardo CastanÎncă nu există evaluări
- Diseño de LevasDocument38 paginiDiseño de Levasmisemo17100% (1)
- Diagrama S A V JDocument7 paginiDiagrama S A V JJayroMichaelOchoaÎncă nu există evaluări
- Investigacion de Levas - JoseDocument9 paginiInvestigacion de Levas - JoseJORGE ANTONIO PEREZ ROBLESÎncă nu există evaluări
- Diseo de Levas Mecanismos CompressDocument123 paginiDiseo de Levas Mecanismos CompressANDY DUSSTIN CANO SALLHUEÎncă nu există evaluări
- Investigacion Tipos de Levas y Seguidores FormatoDocument11 paginiInvestigacion Tipos de Levas y Seguidores FormatoJohn SmithÎncă nu există evaluări
- Dimensionamiento analítico de levas para seguidores de traslaciónDocument10 paginiDimensionamiento analítico de levas para seguidores de traslaciónLaura Juditt “De los Angeles Tapia” de los Angeles TapiaÎncă nu există evaluări
- Tecnologico Nacional de México: Análisis y síntesis de mecanismos - LevasDocument9 paginiTecnologico Nacional de México: Análisis y síntesis de mecanismos - LevasJORGE ANTONIO PEREZ ROBLESÎncă nu există evaluări
- LEVASDocument12 paginiLEVASRafael Ramirez MatizÎncă nu există evaluări
- Laboratorio de Perdida Por FriccionDocument25 paginiLaboratorio de Perdida Por FriccionLeo DonadoÎncă nu există evaluări
- Actividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinDocument5 paginiActividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinRIGOBERTO MARIN OVIEDOÎncă nu există evaluări
- Proyecto de LevasDocument14 paginiProyecto de LevasJonathan Rueda100% (1)
- Sistema de LevasDocument15 paginiSistema de LevasAlexia GuerreroÎncă nu există evaluări
- Levas MecanismosDocument41 paginiLevas MecanismosalfonsoÎncă nu există evaluări
- Ingeniería Mecatrónica: Nomenclatura, clasificación y aplicación de levas y seguidoresDocument7 paginiIngeniería Mecatrónica: Nomenclatura, clasificación y aplicación de levas y seguidoresDaniel Gregorio Vera AnastacioÎncă nu există evaluări
- Tema 3 LevasDocument18 paginiTema 3 Levasbeauty lifeÎncă nu există evaluări
- Diseño y Análisis Cinemático de LevasDocument19 paginiDiseño y Análisis Cinemático de LevasKatherine MacíasÎncă nu există evaluări
- Clasificación y diseño de levasDocument27 paginiClasificación y diseño de levasRommel Rincon RuedaÎncă nu există evaluări
- Diseño de LevasDocument9 paginiDiseño de LevasElvis Medardo Cano LaymeÎncă nu există evaluări
- Unidad 3Document37 paginiUnidad 3Sergio Antonio Hernández GordilloÎncă nu există evaluări
- Cap - LEVASDocument13 paginiCap - LEVASPathy LamadridÎncă nu există evaluări
- Levas FinalDocument38 paginiLevas Finaltanher2301Încă nu există evaluări
- Actividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinDocument5 paginiActividad de Aprendizaje 4.2 Diagramas de Desplazamiento - Rigoberto MarinRIGOBERTO MARIN OVIEDOÎncă nu există evaluări
- Cinematica Circular 2019 IIDocument40 paginiCinematica Circular 2019 II123juanreyes0% (1)
- MECANISMO DE LEVASDocument28 paginiMECANISMO DE LEVASandresÎncă nu există evaluări
- Levas 2Document14 paginiLevas 2yordi_1Încă nu există evaluări
- Mecanismos EtcDocument15 paginiMecanismos EtcIvette Gonzalez OrdoñezÎncă nu există evaluări
- Diagramas de Desplazamientos y Diseño de Perfiles de Levas.Document8 paginiDiagramas de Desplazamientos y Diseño de Perfiles de Levas.Uriel Andrés Soria Hernández100% (2)
- LevasDocument17 paginiLevasangelÎncă nu există evaluări
- Levas y ExcentricasTRABAJO - ROJODocument12 paginiLevas y ExcentricasTRABAJO - ROJOalvarodf3Încă nu există evaluări
- Cinemática de La RotaciónDocument23 paginiCinemática de La RotaciónBrenda RodriguezÎncă nu există evaluări
- Mecanismos de levas: conceptos básicosDocument34 paginiMecanismos de levas: conceptos básicosRene Rdz VillaÎncă nu există evaluări
- Cinematica de LevasDocument6 paginiCinematica de LevasJ Rodrigo Castro HÎncă nu există evaluări
- Levas mecánicas: clasificación y diseñoDocument7 paginiLevas mecánicas: clasificación y diseñoÁngel Cosme LeyvaÎncă nu există evaluări
- Diseño Analitico de LevasDocument16 paginiDiseño Analitico de LevasCamilo Gutierrez DbzÎncă nu există evaluări
- 3apuntes Unidad Iii PDFDocument15 pagini3apuntes Unidad Iii PDFjuliogomez008Încă nu există evaluări
- Glosario U2Document11 paginiGlosario U2dapavalderramagoÎncă nu există evaluări
- Diagrama de DesplazamientoDocument8 paginiDiagrama de DesplazamientoLizandro EugenioÎncă nu există evaluări
- Rio Unidad III LevasDocument7 paginiRio Unidad III LevasRoberto Trejo MuñozÎncă nu există evaluări
- Diseño de Levas - MecanismosDocument123 paginiDiseño de Levas - MecanismosSebastián Rivera Pabón100% (1)
- Que Es Una LevaDocument8 paginiQue Es Una LevaMiriam ACÎncă nu există evaluări
- Teoría de Máquinas - Semana 14Document27 paginiTeoría de Máquinas - Semana 14Jerson HuachosÎncă nu există evaluări
- Lección 11 Mecanismos de Leva y SeguidorDocument26 paginiLección 11 Mecanismos de Leva y SeguidorRoland LoachamínÎncă nu există evaluări
- LevasDocument30 paginiLevasAlex SantosÎncă nu există evaluări
- Mecanismos Unidad 3 PDFDocument65 paginiMecanismos Unidad 3 PDFGRACIELA ANDREA MEZA DENNISÎncă nu există evaluări
- Perfil de LevaDocument26 paginiPerfil de Levazaraygalindo1Încă nu există evaluări
- MOVIMIENTO DEL Seguidor Presentacion 2Document18 paginiMOVIMIENTO DEL Seguidor Presentacion 2Luisa Saavedra33% (3)
- Cinematica Plana de Un Cuerpo RigidoDocument57 paginiCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- Práctica 8 2023 IDocument25 paginiPráctica 8 2023 IManzanAÎncă nu există evaluări
- Levas y EngranajesDocument89 paginiLevas y EngranajeswellsperkeitaroÎncă nu există evaluări
- U3 LevasDocument11 paginiU3 LevasKevin EstradaÎncă nu există evaluări
- Diagramas de DesplazamientoDocument11 paginiDiagramas de DesplazamientoRobinson VelezÎncă nu există evaluări
- Ejercicios de Integrales de Línea, Superficie y VolumenDe la EverandEjercicios de Integrales de Línea, Superficie y VolumenEvaluare: 4 din 5 stele4/5 (2)
- NuevoDocument3 paginiNuevoLuis Limay ValderramaÎncă nu există evaluări
- TirnidadDocument3 paginiTirnidadLuis Limay ValderramaÎncă nu există evaluări
- Diagrama de Flujo de CajaDocument1 paginăDiagrama de Flujo de CajaLuis Limay ValderramaÎncă nu există evaluări
- Curso de Refrigeracion RSW - CIP CallaoDocument1 paginăCurso de Refrigeracion RSW - CIP CallaoLuis Limay ValderramaÎncă nu există evaluări
- DiagramaDocument1 paginăDiagramaLuis Limay ValderramaÎncă nu există evaluări
- NuevoDocument3 paginiNuevoLuis Limay ValderramaÎncă nu există evaluări
- NuevoDocument5 paginiNuevoLuis Limay ValderramaÎncă nu există evaluări
- NuevoDocument5 paginiNuevoLuis Limay ValderramaÎncă nu există evaluări
- NuevoDocument5 paginiNuevoLuis Limay ValderramaÎncă nu există evaluări
- Las Ocho Regiones Naturales Del PerúDocument7 paginiLas Ocho Regiones Naturales Del PerúLuis Limay ValderramaÎncă nu există evaluări
- Juego Unidos 2019Document4 paginiJuego Unidos 2019Luis Limay ValderramaÎncă nu există evaluări
- Formulario Curso Gratuito 201Document2 paginiFormulario Curso Gratuito 201Luis Limay ValderramaÎncă nu există evaluări
- REVISARDocument5 paginiREVISARLuis Limay ValderramaÎncă nu există evaluări
- RecursosDocument1 paginăRecursosLuis Limay ValderramaÎncă nu există evaluări
- Articulos BiblicosDocument16 paginiArticulos BiblicosLuis Limay ValderramaÎncă nu există evaluări
- Conversando CristianismoDocument3 paginiConversando CristianismoLuis Limay ValderramaÎncă nu există evaluări
- Tornillos GeneralidadesDocument63 paginiTornillos GeneralidadesWinsy Johan Diaz VanegasÎncă nu există evaluări
- MMC 02040 M 117 - 2Document1 paginăMMC 02040 M 117 - 2Luis Limay ValderramaÎncă nu există evaluări
- NORMAS para PlanosDocument64 paginiNORMAS para PlanosLuis Limay Valderrama100% (1)
- Economia de AsiaDocument7 paginiEconomia de AsiaLuis Limay ValderramaÎncă nu există evaluări
- Limay Valderrama Luis - Resolución #1 - USBADocument4 paginiLimay Valderrama Luis - Resolución #1 - USBALuis Limay ValderramaÎncă nu există evaluări
- Normas Apa 2015Document21 paginiNormas Apa 2015Anastacio Sandalia Saliva81% (31)
- Partes de Un Trabajo CientificoDocument22 paginiPartes de Un Trabajo CientificoLuis Limay ValderramaÎncă nu există evaluări
- Comentario Del VideoDocument1 paginăComentario Del VideoLuis Limay ValderramaÎncă nu există evaluări
- 14 Dados de ImpactoDocument102 pagini14 Dados de ImpactoLuis Limay ValderramaÎncă nu există evaluări
- Articulos BiblicosDocument16 paginiArticulos BiblicosLuis Limay ValderramaÎncă nu există evaluări
- Aproximaciones de La Iglesia Primitiva Con La Iglesia Post ModernaDocument2 paginiAproximaciones de La Iglesia Primitiva Con La Iglesia Post ModernaLuis Limay ValderramaÎncă nu există evaluări
- Sexo y juventud: consejos bíblicosDocument67 paginiSexo y juventud: consejos bíblicosGladys León75% (4)
- CanDocument10 paginiCanLuis Limay ValderramaÎncă nu există evaluări
- Estudio de RomanosDocument19 paginiEstudio de RomanosLuis Limay ValderramaÎncă nu există evaluări
- Fichas de Aplicación - 5ºDocument103 paginiFichas de Aplicación - 5ºMilagros Leon ZavalaÎncă nu există evaluări
- Las Bases Psicologicas de La Educacion MusicalDocument15 paginiLas Bases Psicologicas de La Educacion MusicalomegarmxÎncă nu există evaluări
- Administración de Alimentos y Bebidas.Document37 paginiAdministración de Alimentos y Bebidas.luisarangure100% (1)
- Active and Passive Self-Ligation - A Myth - .En - EsDocument7 paginiActive and Passive Self-Ligation - A Myth - .En - EsMilton David Rios SerratoÎncă nu există evaluări
- El Espíritu Santo en Hechos 2Document2 paginiEl Espíritu Santo en Hechos 2elinmer0% (1)
- Calculo Diferencial Tarea 2Document13 paginiCalculo Diferencial Tarea 2carlos cuartasÎncă nu există evaluări
- El Aguila LDocument4 paginiEl Aguila LDiomedes Mora PérezÎncă nu există evaluări
- Axiologia y Ciencia de Los ValoresDocument11 paginiAxiologia y Ciencia de Los Valoresale9388Încă nu există evaluări
- Derecho AdministrativoDocument14 paginiDerecho AdministrativoElizabethSaraiÎncă nu există evaluări
- La función de los educadores en museos y centros de arteDocument16 paginiLa función de los educadores en museos y centros de arteSara Elena MOÎncă nu există evaluări
- Huerta tradicional aisladaDocument4 paginiHuerta tradicional aisladaSandra AlvaradoÎncă nu există evaluări
- Semsexcolombia PDFDocument334 paginiSemsexcolombia PDFMariana Arevalo MorenoÎncă nu există evaluări
- Amor en Tiempos de FaceboockDocument4 paginiAmor en Tiempos de FaceboockElma CuriosidadesÎncă nu există evaluări
- Ventura, Mariela (2008) - Psicoanalisis, Una Condicion para La Continuidad de La Carrera Durante La DictaduraDocument3 paginiVentura, Mariela (2008) - Psicoanalisis, Una Condicion para La Continuidad de La Carrera Durante La DictaduraDanielÎncă nu există evaluări
- Modelos de Madurez en La Administracion de Proyectos PDFDocument0 paginiModelos de Madurez en La Administracion de Proyectos PDFDaniel Miranda CasanovaÎncă nu există evaluări
- Empoderamiento de Las Mujeres 2004.Document106 paginiEmpoderamiento de Las Mujeres 2004.mugarikgabeÎncă nu există evaluări
- La Empresa CreceDocument26 paginiLa Empresa CreceJose BelmonteÎncă nu există evaluări
- Presión activa tierra - Teoría MazindraniDocument2 paginiPresión activa tierra - Teoría MazindraniKatherin Huarhuachi EspinozaÎncă nu există evaluări
- Tipos de ResúmenesDocument3 paginiTipos de ResúmenesTIAGOÎncă nu există evaluări
- Fenomenología y Ciencias CognitivasDocument11 paginiFenomenología y Ciencias CognitivasDyekman RangelÎncă nu există evaluări
- Introducción a la PsicologíaDocument16 paginiIntroducción a la PsicologíaSocorro JimenezÎncă nu există evaluări
- Citas Textuales CompletoDocument9 paginiCitas Textuales CompletoMilagro Ochoa CadenasÎncă nu există evaluări
- Historia SatipoDocument16 paginiHistoria SatipoBetsy Anguie Ponce CastroÎncă nu există evaluări
- Contratos Traslativos de DominioDocument28 paginiContratos Traslativos de DominioNoemi Palafox Santiago100% (4)
- Técnicas de ConteoDocument19 paginiTécnicas de Conteojaimatematico12700% (1)
- Taller Comunitario para La Creación de Máscaras de HuehuentónDocument21 paginiTaller Comunitario para La Creación de Máscaras de HuehuentónEliza MoraÎncă nu există evaluări
- Hacia la descolonización del territorio del río FarfacaDocument3 paginiHacia la descolonización del territorio del río FarfacaCamilo MéndezÎncă nu există evaluări
- Autoevaluacion 1Document10 paginiAutoevaluacion 1Eliana Arteaga CarlosÎncă nu există evaluări