S-ar putea să vă placă și
- Sepam ManualDocument74 paginiSepam ManualtadagidsÎncă nu există evaluări
- Mikro p3 AdcDocument6 paginiMikro p3 AdcAsfa Eka PrasetyaÎncă nu există evaluări
- 232Document0 pagini232Asfa Eka PrasetyaÎncă nu există evaluări
- Proses Melting: 1. Regenerotor Kanan 2. Furnace 3. Regenerator Kiri Pipa Gas Ke ChimneyDocument3 paginiProses Melting: 1. Regenerotor Kanan 2. Furnace 3. Regenerator Kiri Pipa Gas Ke ChimneyAcesoris ColectionÎncă nu există evaluări
- PIC 16f877a Data SheetDocument234 paginiPIC 16f877a Data Sheetanon-26401438% (8)
- Signal ConditioningDocument30 paginiSignal ConditioningAsfa Eka PrasetyaÎncă nu există evaluări
- Mikro P1 RS 232Document5 paginiMikro P1 RS 232Asfa Eka PrasetyaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- AMICO InstallationManual PDFDocument60 paginiAMICO InstallationManual PDFfernandoÎncă nu există evaluări
- Clevo d900c Sager Np9260 Np9261Document100 paginiClevo d900c Sager Np9260 Np9261Doru RazvanÎncă nu există evaluări
- Stereo Magazine Issue 02Document66 paginiStereo Magazine Issue 02LipsticÎncă nu există evaluări
- SikaRapid-2 2011-10 - 1 PDFDocument2 paginiSikaRapid-2 2011-10 - 1 PDFmehrdad_so1981Încă nu există evaluări
- Li-Fi Industries Communication Using Laser Media in Open SpaceDocument61 paginiLi-Fi Industries Communication Using Laser Media in Open SpaceVinothKumar100% (1)
- A Interview QuestionsDocument363 paginiA Interview QuestionsJaishankar RenganathanÎncă nu există evaluări
- Cost BreakdownDocument241 paginiCost Breakdownbilisuma sebokaÎncă nu există evaluări
- 04 Rociador Tyco K11.2 SRDocument6 pagini04 Rociador Tyco K11.2 SRRuben Saucedo JacomeÎncă nu există evaluări
- Basic Engineering Circuit Analysis 8th Ed SolutionsDocument1.254 paginiBasic Engineering Circuit Analysis 8th Ed SolutionsAndrew David Bushner87% (188)
- Astm D3212.380331 1Document3 paginiAstm D3212.380331 1anish_am2005Încă nu există evaluări
- Soccer Field Lighting DesignDocument22 paginiSoccer Field Lighting DesigndevakaÎncă nu există evaluări
- Guinness Case StudyDocument3 paginiGuinness Case StudyMunyaradzi T HotoÎncă nu există evaluări
- Digital Signal Processing R13 Previous PapersDocument5 paginiDigital Signal Processing R13 Previous PapersPrasannaKumar KaraNam100% (1)
- Eee25 2018syllabusDocument4 paginiEee25 2018syllabusEmman Joshua BustoÎncă nu există evaluări
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocument6 paginiTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatÎncă nu există evaluări
- High Carbon Steel Shot GritDocument2 paginiHigh Carbon Steel Shot Gritabdulaziz mohammedÎncă nu există evaluări
- Engineering Data Analysis (Mod2)Document7 paginiEngineering Data Analysis (Mod2)Mark Peru100% (1)
- OHT Estimates 50000 LtrsDocument59 paginiOHT Estimates 50000 LtrsSandgrouse RajÎncă nu există evaluări
- CAG Report On Antrix-Devas DealDocument76 paginiCAG Report On Antrix-Devas DealCanary Trap100% (1)
- Dry ContactsDocument2 paginiDry ContactsDiwakar MishraÎncă nu există evaluări
- WaterproofingDocument29 paginiWaterproofingAakansha DÎncă nu există evaluări
- (Pasig) Certificate of OccupancyDocument12 pagini(Pasig) Certificate of OccupancyAndrew MarasiganÎncă nu există evaluări
- 09 Technical TablesDocument8 pagini09 Technical TablesRuban Vijaya SinghÎncă nu există evaluări
- SM 121 PDFDocument573 paginiSM 121 PDFEnrique Arevalo LeyvaÎncă nu există evaluări
- EVI DC Inverter Technical Manual 2 Capacity TableDocument67 paginiEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemÎncă nu există evaluări
- Lab 3 SST 4303Document5 paginiLab 3 SST 4303Muazrul MangsorÎncă nu există evaluări
- Flextronics FINALDocument25 paginiFlextronics FINALAnkit GauravÎncă nu există evaluări
- Highway Engineering B 1Document8 paginiHighway Engineering B 1Angelica TolentinoÎncă nu există evaluări
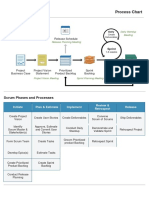
- Procesos SCRUMDocument2 paginiProcesos SCRUMRoseÎncă nu există evaluări
- Resistor DatasheetDocument10 paginiResistor DatasheetEndradno KurniaÎncă nu există evaluări