S-ar putea să vă placă și
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pagini12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamÎncă nu există evaluări
- Trabajo 2Document18 paginiTrabajo 2ing_pemÎncă nu există evaluări
- SAR ADC TutorialDocument13 paginiSAR ADC Tutorialvigneshk100% (3)
- Slua 233Document19 paginiSlua 233Yoseph TsegayeÎncă nu există evaluări
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocument4 paginiA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamÎncă nu există evaluări
- Dual Slope ADC DesignDocument10 paginiDual Slope ADC DesignMoHaMMeD HaLaByÎncă nu există evaluări
- Differential Analog Data Path DC Offset Calibration MethodsDocument7 paginiDifferential Analog Data Path DC Offset Calibration MethodsLincoln RibeiroÎncă nu există evaluări
- Digital Power-Conversion For The Analog EngineerDocument12 paginiDigital Power-Conversion For The Analog EngineerfjwoemcuÎncă nu există evaluări
- UNI/O Application NoteDocument8 paginiUNI/O Application NoteRhenan WafooÎncă nu există evaluări
- Analog To Digital ConverterDocument11 paginiAnalog To Digital ConverterFf Fr100% (1)
- An Ultra-Low-Power Digitally-Controlled Buck Converter ICDocument9 paginiAn Ultra-Low-Power Digitally-Controlled Buck Converter ICrmsharma1970Încă nu există evaluări
- Ultra-Low: Power Silicon-on-Sapphire Energy-ScavengingDocument4 paginiUltra-Low: Power Silicon-on-Sapphire Energy-ScavengingGurkaranjot SinghÎncă nu există evaluări
- Understanding Integrating ADCsDocument5 paginiUnderstanding Integrating ADCsjulioÎncă nu există evaluări
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 paginiUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- UC3879Document9 paginiUC3879Christina Tio TrisnasariÎncă nu există evaluări
- AN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerDocument23 paginiAN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerRudhi KurniawanÎncă nu există evaluări
- UC3845 Technical ExplanationDocument15 paginiUC3845 Technical ExplanationankurmalviyaÎncă nu există evaluări
- Microcontroller-Based Energy Metering using AD7755Document2 paginiMicrocontroller-Based Energy Metering using AD7755Engr Muhammad Irfan ShahidÎncă nu există evaluări
- Controlwave GFC: Power System SizingDocument10 paginiControlwave GFC: Power System SizingCristian DelgadoÎncă nu există evaluări
- A 3.2fJ C.-S. 0.35V 10b 100KS S SAR ADC in 90nm CMOSDocument2 paginiA 3.2fJ C.-S. 0.35V 10b 100KS S SAR ADC in 90nm CMOS陳昀顥Încă nu există evaluări
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 paginiFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisÎncă nu există evaluări
- Adc 0808Document6 paginiAdc 0808GokulThalaÎncă nu există evaluări
- Chapter 6Document42 paginiChapter 6Henry MaedaÎncă nu există evaluări
- Ee 537 HW 2Document1 paginăEe 537 HW 2أحمد السايسÎncă nu există evaluări
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 paginiChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielÎncă nu există evaluări
- Design and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)Document23 paginiDesign and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)uzair aminÎncă nu există evaluări
- Sensorless FOC on 8-bit MCUs delivers high-performance motor controlDocument3 paginiSensorless FOC on 8-bit MCUs delivers high-performance motor controlasASasASÎncă nu există evaluări
- Chapter 1 IntroductionDocument39 paginiChapter 1 IntroductionNivedini KuttiÎncă nu există evaluări
- 6 Adjustable Tripping Settings of A Circuit Breaker You MUST UnderstandDocument10 pagini6 Adjustable Tripping Settings of A Circuit Breaker You MUST UnderstandArmando HuarayaÎncă nu există evaluări
- Multi Level Inverter DocumentationDocument25 paginiMulti Level Inverter Documentationn anushaÎncă nu există evaluări
- Reduce Standby Power Drains With Ultra-Low-Current, Pulse-Frequency-Modulated (PFM) DC-DC ConvertersDocument8 paginiReduce Standby Power Drains With Ultra-Low-Current, Pulse-Frequency-Modulated (PFM) DC-DC Converterssoft4gsmÎncă nu există evaluări
- An137 - Lithium Ion Battery Charger Using c8051f300Document36 paginiAn137 - Lithium Ion Battery Charger Using c8051f300oakkar7Încă nu există evaluări
- EE16 Design of The Single Phase Ac Voltage Regulator For Obtaining Variable Ac VoltageDocument4 paginiEE16 Design of The Single Phase Ac Voltage Regulator For Obtaining Variable Ac VoltageMechWindNaniÎncă nu există evaluări
- VME Smart Analog Monitor (VsamDocument10 paginiVME Smart Analog Monitor (VsamErasmo Franco SÎncă nu există evaluări
- EDN514958Document1 paginăEDN514958butterfly135Încă nu există evaluări
- AppNote03 Uc3842Document14 paginiAppNote03 Uc3842Heriberto Flores AmpieÎncă nu există evaluări
- Slua 143Document15 paginiSlua 143Tonia KataÎncă nu există evaluări
- Aplicacion Uc3842Document15 paginiAplicacion Uc3842Gian Mejia100% (1)
- UC3842 Inside SchematicsDocument17 paginiUC3842 Inside Schematicsp.c100% (1)
- DiDocument6 paginiDipani256Încă nu există evaluări
- U-93 Application NOTE A New Integrated Circuit For Current Mode ControlDocument9 paginiU-93 Application NOTE A New Integrated Circuit For Current Mode ControlpramodÎncă nu există evaluări
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 paginiAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarÎncă nu există evaluări
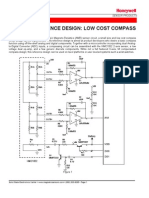
- Reference Design Low Cost CompassDocument4 paginiReference Design Low Cost CompassHany MaximousÎncă nu există evaluări
- Lecture 4-Shunt CompensationDocument44 paginiLecture 4-Shunt CompensationSidharth MishraÎncă nu există evaluări
- Clarifying Current Values and Naming For Celera Motion S Ingenia DrivesDocument8 paginiClarifying Current Values and Naming For Celera Motion S Ingenia DrivesflynlowÎncă nu există evaluări
- EDN Design Ideas 1998Document166 paginiEDN Design Ideas 1998chag1956100% (4)
- Design and Implementation of A 10 Bit SAR ADCDocument4 paginiDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanÎncă nu există evaluări
- A CMOS Mixed-Signal 100 MB S Receive Architecture For Fast EthernetDocument4 paginiA CMOS Mixed-Signal 100 MB S Receive Architecture For Fast EthernetYX PÎncă nu există evaluări
- Flextimer and Adc Synchronization For Field Oriented Control On KinetisDocument11 paginiFlextimer and Adc Synchronization For Field Oriented Control On KinetisElias CarvalhoÎncă nu există evaluări
- A Vector Controlled MCT Matrix Converter Induction Motor Drive With Minimized Commutation Times and Enhanced Waveform QualityDocument7 paginiA Vector Controlled MCT Matrix Converter Induction Motor Drive With Minimized Commutation Times and Enhanced Waveform QualityVenktesh MishraÎncă nu există evaluări
- An 477Document28 paginiAn 477radaresÎncă nu există evaluări
- AN626 - Lead Acid Battery Charger Using The PIC14C000Document0 paginiAN626 - Lead Acid Battery Charger Using The PIC14C000mlaura2Încă nu există evaluări
- A 53-nW 9.1-ENOB 1-kS/s SAR ADC in 0.13-m CMOS For Medical Implant DevicesDocument9 paginiA 53-nW 9.1-ENOB 1-kS/s SAR ADC in 0.13-m CMOS For Medical Implant DevicesAshish JoshiÎncă nu există evaluări
- Understanding Integrating ADC AN1041Document7 paginiUnderstanding Integrating ADC AN1041dileepank14Încă nu există evaluări
- How To Size Current TransformersDocument5 paginiHow To Size Current TransformersSumith VkÎncă nu există evaluări
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 paginiLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasÎncă nu există evaluări
- AN025-DC Motor Control With TMC4671Document11 paginiAN025-DC Motor Control With TMC4671Roland von KurnatowskiÎncă nu există evaluări
- Improving Common-Mode Rejection Using The Right-Leg Drive AmplifierDocument11 paginiImproving Common-Mode Rejection Using The Right-Leg Drive AmplifiermickÎncă nu există evaluări
- Power Systems-On-Chip: Practical Aspects of DesignDe la EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardÎncă nu există evaluări
- Development of Corrosion-Resistant Coatings For FC Bipolar PlatesDocument9 paginiDevelopment of Corrosion-Resistant Coatings For FC Bipolar PlatesdgujarathiÎncă nu există evaluări
- CH9 Paul Smith Notes Opamp Building BlocksDocument36 paginiCH9 Paul Smith Notes Opamp Building BlocksdgujarathiÎncă nu există evaluări
- Op To CouplerDocument6 paginiOp To CouplerdgujarathiÎncă nu există evaluări
- Linkswitch TN Design An37Document16 paginiLinkswitch TN Design An37dgujarathiÎncă nu există evaluări
- IRLZ44SPBF VishayDocument9 paginiIRLZ44SPBF VishaydgujarathiÎncă nu există evaluări
- Linkswitch TN Design An37Document16 paginiLinkswitch TN Design An37dgujarathiÎncă nu există evaluări
- LNK605 DatasheetDocument18 paginiLNK605 DatasheetdgujarathiÎncă nu există evaluări
- Vio ThermalMgmt WEB 2009 03Document6 paginiVio ThermalMgmt WEB 2009 03dgujarathiÎncă nu există evaluări
- SMPS Boost Using MCU 91053bDocument6 paginiSMPS Boost Using MCU 91053bdgujarathiÎncă nu există evaluări
- Digital Power ConversionDocument16 paginiDigital Power ConversiondgujarathiÎncă nu există evaluări
- A Designers Guide To Instrumentation Amplifiers 2edDocument108 paginiA Designers Guide To Instrumentation Amplifiers 2edaldipdg0% (2)
- bq34z110 Datasheet Slusb55aDocument48 paginibq34z110 Datasheet Slusb55adgujarathiÎncă nu există evaluări
- MCU Based Buck Using AVR Current SupplyDocument4 paginiMCU Based Buck Using AVR Current SupplydgujarathiÎncă nu există evaluări
- FQU1N60CDocument9 paginiFQU1N60CdgujarathiÎncă nu există evaluări
- Toshiba Field Effect Transistor Specifications and ApplicationsDocument6 paginiToshiba Field Effect Transistor Specifications and ApplicationsdgujarathiÎncă nu există evaluări
- Service Manual: Multifunction Electrical Tester CalibratorDocument106 paginiService Manual: Multifunction Electrical Tester CalibratorJuan Carlos Ferrer OrtizÎncă nu există evaluări
- Lab Manual: EET 1082 - Introduction To ElectronicsDocument5 paginiLab Manual: EET 1082 - Introduction To ElectronicsMark CyrulikÎncă nu există evaluări
- Chapter 7 Measurement of High VoltageDocument20 paginiChapter 7 Measurement of High VoltageTeh chia NienÎncă nu există evaluări
- Current and ElectricityDocument10 paginiCurrent and ElectricitySiddanta PoudelÎncă nu există evaluări
- IBIS Io BufferDocument66 paginiIBIS Io BufferBhai BaiÎncă nu există evaluări
- Alexander-Sadiku - Slides To Class 58 - Chapter2 Part 1Document17 paginiAlexander-Sadiku - Slides To Class 58 - Chapter2 Part 1Mubashir KhanÎncă nu există evaluări
- Markscheme SL Paper 1Document60 paginiMarkscheme SL Paper 1Carolina Blasco Méndez 8IÎncă nu există evaluări
- Maxim MAX1771 Boost ConverterDocument16 paginiMaxim MAX1771 Boost ConverterLeo KralÎncă nu există evaluări
- Topic 5 3 Formative-2Document3 paginiTopic 5 3 Formative-2api-296446683Încă nu există evaluări
- EE 304 Measurements and Instrumentation Lecture 2 (Measurement Errors)Document14 paginiEE 304 Measurements and Instrumentation Lecture 2 (Measurement Errors)Mahmoud OmarÎncă nu există evaluări
- BeoGram 4002 6000 Turntable Restoration RepairDocument12 paginiBeoGram 4002 6000 Turntable Restoration RepairRiccardo Ronco0% (1)
- VVVF Inverter MFC 20 30 Teil2 PDFDocument73 paginiVVVF Inverter MFC 20 30 Teil2 PDFPhùng Nhật ÂnÎncă nu există evaluări
- The Model D1029: Installing, Operating and MaintainingDocument89 paginiThe Model D1029: Installing, Operating and MaintainingWashington MazziniÎncă nu există evaluări
- 26 08 00 Electrical Equipment Site Acceptance TestingDocument99 pagini26 08 00 Electrical Equipment Site Acceptance TestingArianna IsabelleÎncă nu există evaluări
- Gibilisco Chapter Test (Chap 1-8)Document9 paginiGibilisco Chapter Test (Chap 1-8)Iahhel FactoranÎncă nu există evaluări
- ITI Electrician NCVT Sem 1Document222 paginiITI Electrician NCVT Sem 1Rupak WOLFDALE DuttaÎncă nu există evaluări
- L200 Regulator CircuitDocument7 paginiL200 Regulator CircuitHenrique Albornoz MilianiÎncă nu există evaluări
- Aug 55 XDocument15 paginiAug 55 XLoz LizÎncă nu există evaluări
- Instruction Manual: Modbus Slave Interface For Digital Mass Flow / Pressure InstrumentsDocument39 paginiInstruction Manual: Modbus Slave Interface For Digital Mass Flow / Pressure InstrumentsmahaprabuasÎncă nu există evaluări
- Question Bank BEEE-1Document3 paginiQuestion Bank BEEE-1binod626573Încă nu există evaluări
- Generator GroundingDocument3 paginiGenerator GroundingNoneya BidnessÎncă nu există evaluări
- Direct Fired Heating Controller User ManualDocument19 paginiDirect Fired Heating Controller User ManualCvijic DejanÎncă nu există evaluări
- Sony KDL-22BX300,32BX300 Chassis AZ1-FK PDFDocument33 paginiSony KDL-22BX300,32BX300 Chassis AZ1-FK PDFciro_svÎncă nu există evaluări
- Foundations: 1.2.1 Voltage and CurrentDocument70 paginiFoundations: 1.2.1 Voltage and CurrentTiên's Min'sÎncă nu există evaluări
- Three-Channel Audio Amplifier: DescriptionDocument7 paginiThree-Channel Audio Amplifier: DescriptionDany ChávezÎncă nu există evaluări
- Measurements of Soil Redox PotentialDocument7 paginiMeasurements of Soil Redox PotentialMehedi HasanÎncă nu există evaluări
- ECISDocument8 paginiECISDebanjan DasÎncă nu există evaluări
- Grade 11 Electricity W.sheetDocument6 paginiGrade 11 Electricity W.sheetUsman AmeenÎncă nu există evaluări
- Trip Circuit SupervisionDocument34 paginiTrip Circuit Supervisionucb1_ntpcÎncă nu există evaluări