S-ar putea să vă placă și
- Pneumatic SymbolsDocument2 paginiPneumatic SymbolsBharathprabhu100% (1)
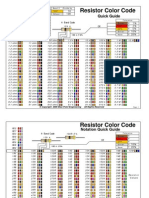
- Resistencias Codigo Colores PDFDocument2 paginiResistencias Codigo Colores PDF'Cesar Guel81% (16)
- Discrete Vs IC OpampsDocument36 paginiDiscrete Vs IC OpampsDimitris BigMac ChristouÎncă nu există evaluări
- An Overview of Banner's Extensive Knowledge-Base: First EditionDocument16 paginiAn Overview of Banner's Extensive Knowledge-Base: First EditionSilvia_282008roÎncă nu există evaluări
- Opto-electronic Sensors GuideDocument30 paginiOpto-electronic Sensors Guidediegob_2Încă nu există evaluări
- Photoelectric Sensor SolutionsDocument13 paginiPhotoelectric Sensor SolutionsHa RbÎncă nu există evaluări
- Man Mic Basics Photoelectric en A22 DRW 950369 02 000Document10 paginiMan Mic Basics Photoelectric en A22 DRW 950369 02 000Leoned Cova OrozcoÎncă nu există evaluări
- Keyence FS2 60Document10 paginiKeyence FS2 60ntdien923Încă nu există evaluări
- What Is A SensorDocument17 paginiWhat Is A SensorPatil Amol PandurangÎncă nu există evaluări
- DEE 3323.13 Sensor2Document88 paginiDEE 3323.13 Sensor2nabilo20Încă nu există evaluări
- ProximitySensors Lec1Document17 paginiProximitySensors Lec1Atharva SoniÎncă nu există evaluări
- Fundamentals of Photoelectric SensorsDocument6 paginiFundamentals of Photoelectric SensorsKimo KimoÎncă nu există evaluări
- Stray Light - Measurement and Effect On Performance in UV-Visible SpectrophotometryDocument2 paginiStray Light - Measurement and Effect On Performance in UV-Visible SpectrophotometryRogerio CaldorinÎncă nu există evaluări
- Photoelectric SensorDocument3 paginiPhotoelectric SensorAmarnath M DamodaranÎncă nu există evaluări
- S Petro Photo MeterDocument42 paginiS Petro Photo MeterAMASMÎncă nu există evaluări
- Chapter 2 (Part B) Instruments For Optical Absorption MeasurementsDocument38 paginiChapter 2 (Part B) Instruments For Optical Absorption MeasurementsaisyahÎncă nu există evaluări
- Proximity SensorsDocument3 paginiProximity SensorsSaurabh SrivastavaÎncă nu există evaluări
- Uv VisDocument6 paginiUv VisTannecia BenjaminÎncă nu există evaluări
- Sensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionDocument15 paginiSensors Installed Across The Conveyor Emitting Diffused Beams Causing Detection in All Four (4) Sensors Installed in The Tray Pusher SectionKram Alim VillonÎncă nu există evaluări
- Single-Ended Reflected Beam Smoke Detector: Applications GuideDocument8 paginiSingle-Ended Reflected Beam Smoke Detector: Applications GuideAnonymous 8RFzObvÎncă nu există evaluări
- Color Wavelength NM Violet Blue Cyan Green Yellow Orange RedDocument4 paginiColor Wavelength NM Violet Blue Cyan Green Yellow Orange RedJhenard John Lansangan BeltranÎncă nu există evaluări
- Interpreting Engineering Data: Through-Beam Sensors and Retro-Reflective SensorsDocument5 paginiInterpreting Engineering Data: Through-Beam Sensors and Retro-Reflective Sensorsotomasi industriÎncă nu există evaluări
- Interpreting Engineering Data: Through-Beam Sensors and Retro-Reflective SensorsDocument5 paginiInterpreting Engineering Data: Through-Beam Sensors and Retro-Reflective Sensorsotomasi industriÎncă nu există evaluări
- Spetrophotometer 090415095014 Phpapp02Document42 paginiSpetrophotometer 090415095014 Phpapp02anujaÎncă nu există evaluări
- Chapter 4 Analytical MethodsDocument104 paginiChapter 4 Analytical MethodsCL SanchezÎncă nu există evaluări
- 2-UV-Vis Molecular SpectrometryDocument27 pagini2-UV-Vis Molecular SpectrometryWahyuni EkaÎncă nu există evaluări
- Introduction to Analytical Techniques: SpectrophotometryDocument42 paginiIntroduction to Analytical Techniques: SpectrophotometryFrankenstein MelancholyÎncă nu există evaluări
- Optical Proximity SensorsDocument8 paginiOptical Proximity SensorsKhoyrul Huda0% (1)
- C08 Rme PPT1 21221Document45 paginiC08 Rme PPT1 21221DHANANJAY VIJAYKUMAR BILEÎncă nu există evaluări
- Automation Book V6Document56 paginiAutomation Book V6ramonemiquelÎncă nu există evaluări
- rangefinderDocument13 paginirangefinderRabi khanÎncă nu există evaluări
- Siemens 3RG7404 0CH00 DatasheetDocument54 paginiSiemens 3RG7404 0CH00 DatasheetManea George-CristianÎncă nu există evaluări
- Photoelectric Sensors: Technical SupportDocument8 paginiPhotoelectric Sensors: Technical SupporttadyÎncă nu există evaluări
- Lecture 2 - Instruments For Optical SpectrosDocument19 paginiLecture 2 - Instruments For Optical SpectrosBelay HaileÎncă nu există evaluări
- The Principle of A UV SpectrometerDocument4 paginiThe Principle of A UV SpectrometerVignesh AmrÎncă nu există evaluări
- The Photoelectric Handbook: Comprehensive Application and Technology ReferenceDocument28 paginiThe Photoelectric Handbook: Comprehensive Application and Technology ReferenceWilliam BuchananÎncă nu există evaluări
- SENSORS Types and ClassificationsDocument5 paginiSENSORS Types and ClassificationsRoderick Rodaje Jr.Încă nu există evaluări
- InstrumentationDocument4 paginiInstrumentationRainneTayÎncă nu există evaluări
- SpectrophotometryDocument40 paginiSpectrophotometryMUKESH SUNDARARAJANÎncă nu există evaluări
- Nephelometry and Turbidimetry: Cls 332 Lab 4Document13 paginiNephelometry and Turbidimetry: Cls 332 Lab 4xxxxxxxÎncă nu există evaluări
- Nephelometry and Turbidimetry: Cls 332 Lab 4Document13 paginiNephelometry and Turbidimetry: Cls 332 Lab 4Ita Maghfirah100% (1)
- Analytical Instrumentation ConceptsDocument20 paginiAnalytical Instrumentation ConceptsshashankÎncă nu există evaluări
- Optical SensorsDocument9 paginiOptical SensorsrthrbyÎncă nu există evaluări
- Proximity SensorsDocument9 paginiProximity SensorsSONAL P JOSEPH 1561363Încă nu există evaluări
- Advanced Spectroscopy: 1. General AspectsDocument56 paginiAdvanced Spectroscopy: 1. General AspectsMohamed DahmaneÎncă nu există evaluări
- Ultraviolet Visible SpectrophotometerDocument11 paginiUltraviolet Visible Spectrophotometerapi-246263792Încă nu există evaluări
- Laser MetrologyDocument41 paginiLaser MetrologyjennybunnyomgÎncă nu există evaluări
- Main Components of a SpectrophotometerDocument12 paginiMain Components of a SpectrophotometerMuhammad RamzanÎncă nu există evaluări
- Optical Sensor Basics and Applications: Types of Optical SensorsDocument8 paginiOptical Sensor Basics and Applications: Types of Optical SensorsVaishnavi TripathiÎncă nu există evaluări
- FFE Pocket Guide V5Document18 paginiFFE Pocket Guide V5kskadryÎncă nu există evaluări
- Spectrophotometers: Robert M. DondelingerDocument6 paginiSpectrophotometers: Robert M. DondelingerJorge SaenzÎncă nu există evaluări
- Paper For Upload PDFDocument6 paginiPaper For Upload PDFAnonymous uJpBMLqHÎncă nu există evaluări
- Jeevan 3Document13 paginiJeevan 3Praveen HariÎncă nu există evaluări
- OPTICAL SENSORS CONVERT LIGHT INTO SIGNALSDocument7 paginiOPTICAL SENSORS CONVERT LIGHT INTO SIGNALSRaphael IbrahÎncă nu există evaluări
- SPECTROPHOTOMETER MODERN LABDocument21 paginiSPECTROPHOTOMETER MODERN LABBaim Black RushÎncă nu există evaluări
- Proximity SensorsDocument4 paginiProximity SensorsRohit Kumar SinghÎncă nu există evaluări
- Spectrophotometry: Basic Concepts, Instrumentation and ApplicationDocument41 paginiSpectrophotometry: Basic Concepts, Instrumentation and ApplicationHilmi Ölmez100% (2)
- LasersDocument10 paginiLasersVlad OnacaÎncă nu există evaluări
- Ultrasonic SensorTraining MaterialDocument15 paginiUltrasonic SensorTraining MaterialToan PhamÎncă nu există evaluări
- Shining a Light on Cool Standards: Infrared Spectroscopy Theory Explored.De la EverandShining a Light on Cool Standards: Infrared Spectroscopy Theory Explored.Încă nu există evaluări
- Process Control MMI ScreensDocument1 paginăProcess Control MMI ScreensBharathprabhuÎncă nu există evaluări
- Hydraulic SymbolsDocument5 paginiHydraulic SymbolsBharathprabhu100% (4)
- Pneumatic SymbolsDocument4 paginiPneumatic SymbolsBharathprabhuÎncă nu există evaluări
- Capacitive SensorsDocument6 paginiCapacitive SensorsBharathprabhuÎncă nu există evaluări
- IP Rating DocumentDocument2 paginiIP Rating DocumentBharathprabhu100% (1)
- IP RatingsDocument1 paginăIP RatingsBharathprabhuÎncă nu există evaluări
- G CodesDocument3 paginiG CodesBharathprabhuÎncă nu există evaluări
- RS-422 and RS-485Document43 paginiRS-422 and RS-485Satya Sai Babu YeletiÎncă nu există evaluări
- Basic Terms of RoboticsDocument4 paginiBasic Terms of RoboticsBharathprabhuÎncă nu există evaluări
- Datasheet Mje1301Document2 paginiDatasheet Mje1301Dan PerezÎncă nu există evaluări
- Driving Transistors and ThyristorsDocument50 paginiDriving Transistors and Thyristorsapi-3720427100% (2)
- Silicon PNP Power TransistorsDocument4 paginiSilicon PNP Power Transistorsjavier byronÎncă nu există evaluări
- Rowan S Series Asynchronous Motor Variable Slip Bidirectional Drive Instruction ManualDocument24 paginiRowan S Series Asynchronous Motor Variable Slip Bidirectional Drive Instruction Manualamskroud brahimÎncă nu există evaluări
- Mmsta05-A06 Sot-323Document4 paginiMmsta05-A06 Sot-323Fikri HidayatÎncă nu există evaluări
- Latch UpDocument4 paginiLatch UpCherry AbhiÎncă nu există evaluări
- BJT DC CHARACTERISTICS LABDocument5 paginiBJT DC CHARACTERISTICS LABHarsh SainiÎncă nu există evaluări
- Feature: NPN Silicon General Purpose Transistor Elektronische BauelementeDocument1 paginăFeature: NPN Silicon General Purpose Transistor Elektronische BauelementeRichard Hernandez RuizÎncă nu există evaluări
- Transistor Junction: Llanes, Shyrell Katrin D. Malayan Colleges LagunaDocument2 paginiTransistor Junction: Llanes, Shyrell Katrin D. Malayan Colleges LagunaShyrell Katrin LlanesÎncă nu există evaluări
- Filter: All of TheseDocument24 paginiFilter: All of TheseMansoor AslamÎncă nu există evaluări
- SANIL Sensors Product Catalogue: DC 3-Wire Type Proximity SwitchesDocument44 paginiSANIL Sensors Product Catalogue: DC 3-Wire Type Proximity SwitchesEikcinReyUlangÎncă nu există evaluări
- Power Amplifier Applications Power Switching Applications: Maximum RatingsDocument5 paginiPower Amplifier Applications Power Switching Applications: Maximum RatingsЕвгенийÎncă nu există evaluări
- Conmed 7550 ESU - Service ManualDocument54 paginiConmed 7550 ESU - Service ManualdimmestkidderÎncă nu există evaluări
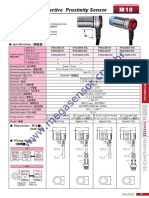
- Tubular Inductive Proximity Sensor Tubular Inductive Proximity SensorDocument4 paginiTubular Inductive Proximity Sensor Tubular Inductive Proximity SensorLuis ParionaÎncă nu există evaluări
- Bipolar Junction Transistor (BJT)Document57 paginiBipolar Junction Transistor (BJT)Tooba AkhtarÎncă nu există evaluări
- EE4341 PPT LowNoiseCircuits V1.0Document101 paginiEE4341 PPT LowNoiseCircuits V1.0Hern YueÎncă nu există evaluări
- B.Tech Degree Course in CSE Scheme of ExaminationsDocument78 paginiB.Tech Degree Course in CSE Scheme of ExaminationsBobin babyÎncă nu există evaluări
- FinalDocument27 paginiFinalAKHAND PRATAP SINGH IET LucknowÎncă nu există evaluări
- Ee Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark StuartDocument6 paginiEe Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark Stuartercan dizdarÎncă nu există evaluări
- 2SD1391 Shenzhen SPTECH Microelectronics Co LTD DatasheetDocument2 pagini2SD1391 Shenzhen SPTECH Microelectronics Co LTD Datasheetgiambi-1Încă nu există evaluări
- Introduction to Power Electronics ChapterDocument9 paginiIntroduction to Power Electronics ChapterSouvik GanguliÎncă nu există evaluări
- BJT Amplifier GuideDocument4 paginiBJT Amplifier GuidePatricia Rossellinni GuintoÎncă nu există evaluări
- Object Detection 219166 Global Line BrochureDocument36 paginiObject Detection 219166 Global Line BrochureBalluff SensorsÎncă nu există evaluări
- IRGR4045DPBFDocument11 paginiIRGR4045DPBFRaduÎncă nu există evaluări
- BJT T ModelDocument9 paginiBJT T Modelkashyap_cherukuriÎncă nu există evaluări
- Banner LS4 LS10 Part Sensing SensorsDocument7 paginiBanner LS4 LS10 Part Sensing SensorsMemik TylnÎncă nu există evaluări
- Analog Circuit Fundamentals: BJT and FET CharacteristicsDocument43 paginiAnalog Circuit Fundamentals: BJT and FET CharacteristicsjoserxÎncă nu există evaluări
- 반도체 용어 사전Document23 pagini반도체 용어 사전하종인(korean)Încă nu există evaluări