S-ar putea să vă placă și
- Constructed Layered Systems: Measurements and AnalysisDe la EverandConstructed Layered Systems: Measurements and AnalysisÎncă nu există evaluări
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDe la EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianDe la EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianEvaluare: 5 din 5 stele5/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- Elementary Differential Equations with Linear AlgebraDe la EverandElementary Differential Equations with Linear AlgebraÎncă nu există evaluări
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDe la EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportÎncă nu există evaluări
- Difference Equations in Normed Spaces: Stability and OscillationsDe la EverandDifference Equations in Normed Spaces: Stability and OscillationsÎncă nu există evaluări
- Geometric functions in computer aided geometric designDe la EverandGeometric functions in computer aided geometric designÎncă nu există evaluări
- A Course of Mathematics for Engineers and ScientistsDe la EverandA Course of Mathematics for Engineers and ScientistsÎncă nu există evaluări
- A Complete Course in Physics (Graphs) - First EditionDe la EverandA Complete Course in Physics (Graphs) - First EditionÎncă nu există evaluări
- Practical Finite Element Modeling in Earth Science using MatlabDe la EverandPractical Finite Element Modeling in Earth Science using MatlabÎncă nu există evaluări
- Power Geometry in Algebraic and Differential EquationsDe la EverandPower Geometry in Algebraic and Differential EquationsÎncă nu există evaluări
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132De la EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132Încă nu există evaluări
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsDe la EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikÎncă nu există evaluări
- Computer Processing of Remotely-Sensed Images: An IntroductionDe la EverandComputer Processing of Remotely-Sensed Images: An IntroductionÎncă nu există evaluări
- Tables of Coulomb Wave Functions: Whittaker FunctionsDe la EverandTables of Coulomb Wave Functions: Whittaker FunctionsÎncă nu există evaluări
- Nonlinear Control Feedback Linearization Sliding Mode ControlDe la EverandNonlinear Control Feedback Linearization Sliding Mode ControlÎncă nu există evaluări
- Transmutation and Operator Differential EquationsDe la EverandTransmutation and Operator Differential EquationsÎncă nu există evaluări
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDe la EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsÎncă nu există evaluări
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsDe la EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsÎncă nu există evaluări
- Analog Automation and Digital Feedback Control TechniquesDe la EverandAnalog Automation and Digital Feedback Control TechniquesÎncă nu există evaluări
- Tables of Racah Coefficients: Mathematical Tables SeriesDe la EverandTables of Racah Coefficients: Mathematical Tables SeriesÎncă nu există evaluări
- Analytical Modeling of Wireless Communication SystemsDe la EverandAnalytical Modeling of Wireless Communication SystemsÎncă nu există evaluări
- Reactive Oxygen Species: Signaling Between Hierarchical Levels in PlantsDe la EverandReactive Oxygen Species: Signaling Between Hierarchical Levels in PlantsFranz-Josef SchmittÎncă nu există evaluări
- Robot Manipulators: Modeling, Performance Analysis and ControlDe la EverandRobot Manipulators: Modeling, Performance Analysis and ControlÎncă nu există evaluări
- Differential Forms on Electromagnetic NetworksDe la EverandDifferential Forms on Electromagnetic NetworksEvaluare: 4 din 5 stele4/5 (1)
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationDe la EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationÎncă nu există evaluări
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDe la EverandMathematical Tables: Tables of in G [z] for Complex ArgumentÎncă nu există evaluări
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeDe la EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeÎncă nu există evaluări
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesDe la EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesÎncă nu există evaluări
- The Advanced Geometry of Plane Curves and Their ApplicationsDe la EverandThe Advanced Geometry of Plane Curves and Their ApplicationsÎncă nu există evaluări
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingDe la EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingÎncă nu există evaluări
- 7SA522 CatalogueDocument53 pagini7SA522 CataloguePhilip D'cruzÎncă nu există evaluări
- Water Treatments: Steam Water Cycle TreatmentDocument2 paginiWater Treatments: Steam Water Cycle TreatmentkjfenÎncă nu există evaluări
- Selo 1Document26 paginiSelo 1kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Temperature Monitoring: FaizanDocument5 paginiTemperature Monitoring: FaizankjfenÎncă nu există evaluări
- REG670Document88 paginiREG670Rafael Hoffmann PaludoÎncă nu există evaluări
- 555 Timer Tutorial - How to Build CircuitsDocument1 pagină555 Timer Tutorial - How to Build CircuitskjfenÎncă nu există evaluări
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocument5 pagini7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenÎncă nu există evaluări
- Sub 131Document10 paginiSub 131kjfenÎncă nu există evaluări
- Load Forecasting and Standardized Load CurvesDocument10 paginiLoad Forecasting and Standardized Load CurveskjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
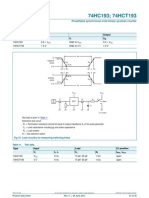
- 74HC193 74HCT193: 13. Package OutlineDocument2 pagini74HC193 74HCT193: 13. Package OutlinekjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 17. Contact InformationDocument2 pagini74HC193 74HCT193: 17. Contact InformationkjfenÎncă nu există evaluări
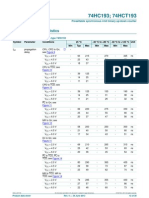
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pagini74HC193 74HCT193: 10. Dynamic CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pagini74HC193 74HCT193: 14. AbbreviationskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pagini74HC193 74HCT193: 10. Dynamic CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC HCT193Document2 pagini74HC HCT193kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pagini74HC193 74HCT193: 5. Pinning InformationkjfenÎncă nu există evaluări
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pagini74HC193 74HCT193: 9. Static CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 4 X 13 W Dual/quad Power Amplifier: FeaturesDocument25 pagini4 X 13 W Dual/quad Power Amplifier: FeaturesDaruslan StrÎncă nu există evaluări
- Introduction To Safety Precautions & Lab Equipment: Power Transmission and Distribution LabDocument16 paginiIntroduction To Safety Precautions & Lab Equipment: Power Transmission and Distribution LabMuhammad Saad AbdullahÎncă nu există evaluări
- Qbca 1 RelayDocument3 paginiQbca 1 RelayArief NüÎncă nu există evaluări
- Disclosure To Promote The Right To InformationDocument15 paginiDisclosure To Promote The Right To InformationduonzaÎncă nu există evaluări
- Easysolar-Ii 48/3000/35-32 MPPT 250/70 GX: The All-In-One Solar Power SolutionDocument2 paginiEasysolar-Ii 48/3000/35-32 MPPT 250/70 GX: The All-In-One Solar Power SolutionRonaldÎncă nu există evaluări
- TL Audio Classic Series 479645Document14 paginiTL Audio Classic Series 479645Nicolas ZuluagaÎncă nu există evaluări
- LG Color TV Service ManualDocument26 paginiLG Color TV Service ManualVadakkevalappilÎncă nu există evaluări
- Tda 2822Document11 paginiTda 2822RICHIHOTS2Încă nu există evaluări
- Saudi Aramco Test ReportDocument10 paginiSaudi Aramco Test Reportkarthi51289100% (1)
- Electrical-Engineering Engineering Analog-Electronics General-Amplifiers Notes PDFDocument32 paginiElectrical-Engineering Engineering Analog-Electronics General-Amplifiers Notes PDFRaja MariyappanÎncă nu există evaluări
- ConSol SR208CDocument31 paginiConSol SR208CRatioterm Energii RegenerabileÎncă nu există evaluări
- Electrical Tools and Equipment GuideDocument35 paginiElectrical Tools and Equipment GuideLogan LeeÎncă nu există evaluări
- Quiz 22: Multiple-Choice Questions On Batteries and Alternative Sources of EnergyDocument2 paginiQuiz 22: Multiple-Choice Questions On Batteries and Alternative Sources of EnergyRavi Kumar VermaÎncă nu există evaluări
- 4000 Air Gap ManualDocument59 pagini4000 Air Gap ManualAntonio MejiaÎncă nu există evaluări
- 13 Determination of Equivalent Circuit Parameters of A 1-Ph Induction Motor.Document3 pagini13 Determination of Equivalent Circuit Parameters of A 1-Ph Induction Motor.Ashwani BhadaniÎncă nu există evaluări
- mxn738 - P01ed - A - B&R - Swiftlock Vacuum FrontloadDocument62 paginimxn738 - P01ed - A - B&R - Swiftlock Vacuum FrontloadCaalaa Dabalaa LamuuÎncă nu există evaluări
- BowTie 2Document8 paginiBowTie 2Rezmerita FlorinÎncă nu există evaluări
- Principles of Electric Circuits, Conventional Flow, 9 EdDocument24 paginiPrinciples of Electric Circuits, Conventional Flow, 9 EdYodel RamírezÎncă nu există evaluări
- Effect of Surge Current Testing On Reliability of Solid Tantalum CapacitorsDocument18 paginiEffect of Surge Current Testing On Reliability of Solid Tantalum CapacitorsRoberto FernandezÎncă nu există evaluări
- KEP's high voltage cable testing equipmentDocument6 paginiKEP's high voltage cable testing equipmentPaulo CardosoÎncă nu există evaluări
- Sma SMC 9000tl-11000tl enDocument2 paginiSma SMC 9000tl-11000tl enTomuta StefanÎncă nu există evaluări
- PSTrace 5.6 Manual 2Document100 paginiPSTrace 5.6 Manual 2Juan Daniel Sarmiento AbelloÎncă nu există evaluări
- Electronics Engineering - Board.student - Manual.en.v.2.59Document119 paginiElectronics Engineering - Board.student - Manual.en.v.2.59JAiro GArciaÎncă nu există evaluări
- Strong Fet Irfb7437Pbf: V 40V R Typ. 1.5Mω Max. 2.0M I 250Ac I 195ADocument10 paginiStrong Fet Irfb7437Pbf: V 40V R Typ. 1.5Mω Max. 2.0M I 250Ac I 195Arov1976Încă nu există evaluări
- AP Physics 2: Algebra-Based 2015 Free-Response QuestionsDocument11 paginiAP Physics 2: Algebra-Based 2015 Free-Response QuestionsAdam El TohamyÎncă nu există evaluări
- XGN15 Ring Main Unit User's ManualDocument21 paginiXGN15 Ring Main Unit User's ManualFrancisco VeraÎncă nu există evaluări
- Long Life 12V 100Ah Gel Battery for Telecom, UPS, and Emergency PowerDocument2 paginiLong Life 12V 100Ah Gel Battery for Telecom, UPS, and Emergency PowerIwhan KristantoÎncă nu există evaluări
- Electrical Circuit & Circuit Analysis MCQ'SDocument27 paginiElectrical Circuit & Circuit Analysis MCQ'SGuruKPO83% (12)
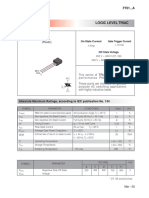
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 paginiLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffÎncă nu există evaluări
- Variations and Configurations of The A3 ALPHA: MeterDocument2 paginiVariations and Configurations of The A3 ALPHA: MeterGanesan SelvamÎncă nu există evaluări









































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)