S-ar putea să vă placă și
- UNIT-1: Lecture Notes Unit 1: Transient AnalysisDocument36 paginiUNIT-1: Lecture Notes Unit 1: Transient AnalysisRamalingeswar JÎncă nu există evaluări
- Digital ExciterDocument80 paginiDigital ExciterKUNALJAY100% (2)
- ANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFDocument8 paginiANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFRicardo BozoÎncă nu există evaluări
- PS 835 RevB PDFDocument114 paginiPS 835 RevB PDFJaime ArroyoÎncă nu există evaluări
- Diode ModifiedDocument77 paginiDiode Modifiedronaldbolorbaral8809Încă nu există evaluări
- Numerical Oscillations in EMTP PDFDocument4 paginiNumerical Oscillations in EMTP PDFCarlos Lino Rojas AgüeroÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Desalter OperationDocument11 paginiDesalter OperationBhumika Chawla80% (5)
- EEX 107.07 Fundamentals of Cable Fault LocalizationDocument28 paginiEEX 107.07 Fundamentals of Cable Fault LocalizationJellyn Base100% (1)
- 13.installation Manual of TBEA Outdoor Inverter-V1.0 - 20190828Document48 pagini13.installation Manual of TBEA Outdoor Inverter-V1.0 - 20190828cicm1993100% (1)
- Mohican Manual No.12Document273 paginiMohican Manual No.12carabeiropuebla67% (3)
- Chapter 4: Electrical TransientsDocument6 paginiChapter 4: Electrical TransientsSandra WendamÎncă nu există evaluări
- Simulation of Electric Machines and Drive Systems Using Matlab and SimulinkDocument11 paginiSimulation of Electric Machines and Drive Systems Using Matlab and SimulinkmdpkishoreÎncă nu există evaluări
- Machine Simulation ModelsDocument22 paginiMachine Simulation ModelsAshwani RanaÎncă nu există evaluări
- Electrical MEO Class 2 NOTESDocument19 paginiElectrical MEO Class 2 NOTESManuj PatelÎncă nu există evaluări
- RC-RL and RLC CircuitsDocument15 paginiRC-RL and RLC CircuitsHaris Noushahi50% (2)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Dymanic Modelling of Machine SynchromuousDocument23 paginiDymanic Modelling of Machine SynchromuousRaturi DeepankarÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- DEMAGDocument88 paginiDEMAGPajserchina88% (8)
- Dfig Book PDFDocument29 paginiDfig Book PDFSrinivasan PurushothamanÎncă nu există evaluări
- RLC Transfer Function AnalysisDocument38 paginiRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- Integrator of Differential EquationsDocument3 paginiIntegrator of Differential EquationsAndi PandiÎncă nu există evaluări
- Analytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesDocument9 paginiAnalytical Modeling Thyristor-Controlled Series Capacitors For SSR StljdiesKris SwaminathanÎncă nu există evaluări
- TCSC LoadflowDocument7 paginiTCSC Loadflowreddy_nnsÎncă nu există evaluări
- 3 - 2b Transformer Energization - ModelingDocument7 pagini3 - 2b Transformer Energization - ModelingNalex GeeÎncă nu există evaluări
- Jalal I 1994Document7 paginiJalal I 1994jm.mankavil6230Încă nu există evaluări
- BBAU University B.Tech Exam Q&A on Network AnalysisDocument9 paginiBBAU University B.Tech Exam Q&A on Network AnalysisPrakharGupta100% (1)
- Characterization of High-Q Resonators For Microwave Filter ApplicationsDocument4 paginiCharacterization of High-Q Resonators For Microwave Filter ApplicationshazardassÎncă nu există evaluări
- 3 AC Responses of Circuit ElementsDocument8 pagini3 AC Responses of Circuit ElementstinymairaÎncă nu există evaluări
- EXP1 Batch ReactorDocument22 paginiEXP1 Batch Reactoralex lim0% (1)
- Optimization of Switched-Mode Systems With Switching CostsDocument6 paginiOptimization of Switched-Mode Systems With Switching Costssf111Încă nu există evaluări
- Resonancia SubsincronaDocument16 paginiResonancia SubsincronaSheyla Elizabeth Santamaria RoqueÎncă nu există evaluări
- Methods and Algorithms For Advanced Process ControlDocument8 paginiMethods and Algorithms For Advanced Process ControlJohn CoucÎncă nu există evaluări
- Modelling and Simulation of Static Var Compensator with MatlabDocument6 paginiModelling and Simulation of Static Var Compensator with MatlabYasir AmmarÎncă nu există evaluări
- 4.4.2 Capacitors MSDocument8 pagini4.4.2 Capacitors MSAhmad HussainÎncă nu există evaluări
- PMSM 3Document4 paginiPMSM 3VegembogaÎncă nu există evaluări
- Park TransformationDocument6 paginiPark TransformationfirdousulnazirÎncă nu există evaluări
- Closed Loop Speed Control of a DC Motor Lab ManualDocument9 paginiClosed Loop Speed Control of a DC Motor Lab ManualnatashaÎncă nu există evaluări
- LAB2Document4 paginiLAB2Anya SohailÎncă nu există evaluări
- Symmetrical FaultDocument54 paginiSymmetrical FaultshinkazamaÎncă nu există evaluări
- RC SeriesDocument8 paginiRC SeriesMoaid BinÎncă nu există evaluări
- Static Var Compensator Controls Reactive PowerDocument23 paginiStatic Var Compensator Controls Reactive PowersetyawanÎncă nu există evaluări
- Identifying Synchronous Machine Parameters Using Broadband ExcitationsDocument11 paginiIdentifying Synchronous Machine Parameters Using Broadband ExcitationsAnonymous m8oCtJBÎncă nu există evaluări
- Optimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EduDocument6 paginiOptimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EdursrtnjÎncă nu există evaluări
- Lecture 1Document23 paginiLecture 1KESHAV JHAÎncă nu există evaluări
- 10 - Chapter 3Document29 pagini10 - Chapter 3SriramÎncă nu există evaluări
- EEEE6115 UBa22EP025 AC m3Document20 paginiEEEE6115 UBa22EP025 AC m3Wanki CharlesÎncă nu există evaluări
- Effects of Dynamic Fault Impedance on Transmission Line Fault LocationDocument5 paginiEffects of Dynamic Fault Impedance on Transmission Line Fault Locationjijo123408Încă nu există evaluări
- AC Analyses: Excerpted From "The Designer's Guide To SPICE and Spectre" by KundertDocument8 paginiAC Analyses: Excerpted From "The Designer's Guide To SPICE and Spectre" by KundertmursriÎncă nu există evaluări
- Psa RecordDocument66 paginiPsa RecordMurugesan ArumugamÎncă nu există evaluări
- Post-Outage State Estimations For Outage ManagementDocument5 paginiPost-Outage State Estimations For Outage ManagementSlimane SouagÎncă nu există evaluări
- Space Vector Modulation An IntroductionDocument10 paginiSpace Vector Modulation An IntroductionJohan LinderÎncă nu există evaluări
- Kalman Filter and Surveying ApplicationsDocument30 paginiKalman Filter and Surveying ApplicationskateborghiÎncă nu există evaluări
- Electrical Machines and Power Systems-1Document13 paginiElectrical Machines and Power Systems-1Hamza AteeqÎncă nu există evaluări
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 paginiA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşÎncă nu există evaluări
- 00489356Document12 pagini00489356ayyappacrrÎncă nu există evaluări
- App 4 LaplaceDocument6 paginiApp 4 LaplaceRycille AlayanÎncă nu există evaluări
- Rasheef Maths AssignmantDocument10 paginiRasheef Maths AssignmantMohamed SanoosÎncă nu există evaluări
- Ac DC Load Flow 3phaseDocument26 paginiAc DC Load Flow 3phaseSajith RpÎncă nu există evaluări
- Transients DerivationsDocument18 paginiTransients DerivationsWendell NiveraÎncă nu există evaluări
- 241 RLC Circuit Ac SourceDocument14 pagini241 RLC Circuit Ac SourceWsma AmswÎncă nu există evaluări
- Logistic Map Circuit PDFDocument8 paginiLogistic Map Circuit PDFmenguemengueÎncă nu există evaluări
- R-L & R-C CircuitsDocument41 paginiR-L & R-C CircuitsAlamgir Kabir ShuvoÎncă nu există evaluări
- RC Circuit Transient Analysis with MatlabDocument8 paginiRC Circuit Transient Analysis with MatlabMartín SilvestreÎncă nu există evaluări
- RL RC CircuitDocument8 paginiRL RC CircuitDavex GwapoÎncă nu există evaluări
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDe la EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- 7SA522 CatalogueDocument53 pagini7SA522 CataloguePhilip D'cruzÎncă nu există evaluări
- Temperature Monitoring: FaizanDocument5 paginiTemperature Monitoring: FaizankjfenÎncă nu există evaluări
- Water Treatments: Steam Water Cycle TreatmentDocument2 paginiWater Treatments: Steam Water Cycle TreatmentkjfenÎncă nu există evaluări
- Sub 131Document10 paginiSub 131kjfenÎncă nu există evaluări
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocument5 pagini7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenÎncă nu există evaluări
- Selo 1Document26 paginiSelo 1kjfenÎncă nu există evaluări
- REG670Document88 paginiREG670Rafael Hoffmann PaludoÎncă nu există evaluări
- 555 Timer Tutorial - How to Build CircuitsDocument1 pagină555 Timer Tutorial - How to Build CircuitskjfenÎncă nu există evaluări
- 74HC193 74HCT193: 17. Contact InformationDocument2 pagini74HC193 74HCT193: 17. Contact InformationkjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Load Forecasting and Standardized Load CurvesDocument10 paginiLoad Forecasting and Standardized Load CurveskjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pagini74HC193 74HCT193: 14. AbbreviationskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
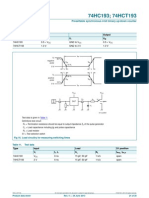
- 74HC193 74HCT193: 13. Package OutlineDocument2 pagini74HC193 74HCT193: 13. Package OutlinekjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
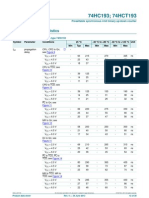
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pagini74HC193 74HCT193: 10. Dynamic CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC HCT193Document2 pagini74HC HCT193kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pagini74HC193 74HCT193: 10. Dynamic CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pagini74HC193 74HCT193: 5. Pinning InformationkjfenÎncă nu există evaluări
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pagini74HC193 74HCT193: 9. Static CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- Brosur SupremeDocument40 paginiBrosur Supremebi9_dick88% (16)
- 7805 IcDocument10 pagini7805 IcCircuits BazaarÎncă nu există evaluări
- Detect Earthquake Warnings with SensorsDocument30 paginiDetect Earthquake Warnings with SensorstibbuÎncă nu există evaluări
- Contoh Iklan BrosurDocument10 paginiContoh Iklan BrosurMuhamad AkhirohÎncă nu există evaluări
- Ventana Network Processor Expansion Module: Operating Manual For Gw16081 Six Mini-Pcie Expansion ModuleDocument19 paginiVentana Network Processor Expansion Module: Operating Manual For Gw16081 Six Mini-Pcie Expansion ModuleOsman AteşÎncă nu există evaluări
- Control DevicesDocument15 paginiControl DevicesMorjhan MJÎncă nu există evaluări
- PVI-5000 - 6000-TL-OUTD-Product Manual EN-RevC (M000022CG) PDFDocument102 paginiPVI-5000 - 6000-TL-OUTD-Product Manual EN-RevC (M000022CG) PDFrryoga92Încă nu există evaluări
- Fast Charging (350 KW) For Electric Vehicles - Possibilities and IssuesDocument39 paginiFast Charging (350 KW) For Electric Vehicles - Possibilities and IssuesVladimir PanuchÎncă nu există evaluări
- Improving Campus Logistics A Comprehensive Exploration of Courier Robot Implementation Using The 6in1 WEEMAKE Robot Kit in School SettingDocument37 paginiImproving Campus Logistics A Comprehensive Exploration of Courier Robot Implementation Using The 6in1 WEEMAKE Robot Kit in School SettingsumandaymattgianÎncă nu există evaluări
- Axpert KS-1-5KVA Manual 20160301Document35 paginiAxpert KS-1-5KVA Manual 20160301ahmedmohamed2014Încă nu există evaluări
- Final Year Project - (Power Electronics/Systems, Electrical Machines IEEE 2016-17 Project ListDocument69 paginiFinal Year Project - (Power Electronics/Systems, Electrical Machines IEEE 2016-17 Project ListSPECTRUM SOLUTIONS100% (1)
- Basic Concepts of Electric Circuits PDFDocument5 paginiBasic Concepts of Electric Circuits PDFMarco TitorÎncă nu există evaluări
- GDM-356 Digital Multimeter GuideDocument33 paginiGDM-356 Digital Multimeter GuideEduardo FloresÎncă nu există evaluări
- Ahv Assignment 1Document11 paginiAhv Assignment 1Asad MaqsoodÎncă nu există evaluări
- SM-1F2 0001Document124 paginiSM-1F2 0001Srinivas EnamandramÎncă nu există evaluări
- Interleaved Multi-Phase Isolated DC-DC ConverterDocument119 paginiInterleaved Multi-Phase Isolated DC-DC ConverterSurajDashÎncă nu există evaluări
- AC vs. DC Coupling in Utility-Scale Solar Plus Storage ProjectsDocument4 paginiAC vs. DC Coupling in Utility-Scale Solar Plus Storage ProjectsRaj SÎncă nu există evaluări
- JC-300 Series BrochureDocument6 paginiJC-300 Series Brochuresinganil1Încă nu există evaluări
- Info Harga Wired Nurse Call System DAN SPESIFIKASIDocument4 paginiInfo Harga Wired Nurse Call System DAN SPESIFIKASIanggaÎncă nu există evaluări
- Lexus rx400h - Hybrid - 2007Document27 paginiLexus rx400h - Hybrid - 2007dodofreddÎncă nu există evaluări
- Manual Epson Scaner PIEZADocument84 paginiManual Epson Scaner PIEZAAbrahamMaslowÎncă nu există evaluări