S-ar putea să vă placă și
- Poetry Analysis Techniques by Cliff NotesDocument9 paginiPoetry Analysis Techniques by Cliff NotesSyed Assar Imam GardeziÎncă nu există evaluări
- 40 Words You Should KnowDocument53 pagini40 Words You Should KnowKawalkhedkar Mohan VinayÎncă nu există evaluări
- Models For A Stand-Alone PV SystemDocument78 paginiModels For A Stand-Alone PV Systemcristian2388Încă nu există evaluări
- EE2022 Electrical Energy Systems: Lecture 15: Electric Power Distribution - Principle of Transformers 14-03-2013Document40 paginiEE2022 Electrical Energy Systems: Lecture 15: Electric Power Distribution - Principle of Transformers 14-03-2013Hamza AkçayÎncă nu există evaluări
- 1.single Phase AC To DC Fully Controlled Converter PDFDocument10 pagini1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanÎncă nu există evaluări
- Ancient - The Greek and Persian Wars 500-323BC - OspreyDocument51 paginiAncient - The Greek and Persian Wars 500-323BC - Ospreyjldrag100% (15)
- EE296 Zafra HomeworkDocument62 paginiEE296 Zafra HomeworkPaolo Josemari ZafraÎncă nu există evaluări
- EE2022 Electrical Energy Systems: Lecture 16: Per Unit Analysis - Single Phase 19-03-2013Document30 paginiEE2022 Electrical Energy Systems: Lecture 16: Per Unit Analysis - Single Phase 19-03-2013Hamza AkçayÎncă nu există evaluări
- Illumination Design by ChrisDocument77 paginiIllumination Design by ChrisChristoper UrbanoÎncă nu există evaluări
- EE5702R Advanced Power System Analysis:: Power System Control IDocument75 paginiEE5702R Advanced Power System Analysis:: Power System Control IscribsunilÎncă nu există evaluări
- EE296 Selected Research Paper PresentationDocument30 paginiEE296 Selected Research Paper PresentationPaolo Josemari ZafraÎncă nu există evaluări
- TE.040 SYSTEM TEST SCRIPT Payables ImplementationDocument28 paginiTE.040 SYSTEM TEST SCRIPT Payables Implementationsanjayapps0% (1)
- Fluid Mechanics Formula SheetDocument5 paginiFluid Mechanics Formula SheetDenise Isebella LeeÎncă nu există evaluări
- EE2022 Electrical Energy Systems: Lecture 17: Per Unit Analysis - Three Phase 21-03-2013Document44 paginiEE2022 Electrical Energy Systems: Lecture 17: Per Unit Analysis - Three Phase 21-03-2013Hamza AkçayÎncă nu există evaluări
- Lec1-Advancne Power System YbusDocument48 paginiLec1-Advancne Power System Ybusbukit_guestÎncă nu există evaluări
- Solar Micro ControllerDocument18 paginiSolar Micro ControllerElangovanÎncă nu există evaluări
- Exadata Storage Expansion x8 DsDocument16 paginiExadata Storage Expansion x8 DskisituÎncă nu există evaluări
- Lab Report Solayman Ewu - CompressDocument12 paginiLab Report Solayman Ewu - CompressVic100% (1)
- Real-Time Simulation Technology for Modern Power ElectronicsDe la EverandReal-Time Simulation Technology for Modern Power ElectronicsÎncă nu există evaluări
- Design of Steel Structure (Chapter 2) by DR R BaskarDocument57 paginiDesign of Steel Structure (Chapter 2) by DR R Baskarelect aksÎncă nu există evaluări
- Course Plan-Power ElectronicsDocument5 paginiCourse Plan-Power ElectronicsNarasimman DonÎncă nu există evaluări
- Institution Mission Statement Institution Vision Statement: Energy Conversion (Lec)Document5 paginiInstitution Mission Statement Institution Vision Statement: Energy Conversion (Lec)yolopÎncă nu există evaluări
- Implementation of Standalone Hybrid Power System Using Matlab/simulinkDocument6 paginiImplementation of Standalone Hybrid Power System Using Matlab/simulinkIJIERT-International Journal of Innovations in Engineering Research and TechnologyÎncă nu există evaluări
- Integration of Green and Renewable Energy in Electric Power SystemsDe la EverandIntegration of Green and Renewable Energy in Electric Power SystemsÎncă nu există evaluări
- Solar Notes PDFDocument178 paginiSolar Notes PDFjaiÎncă nu există evaluări
- Power Electronics Converters and their Control for Renewable Energy ApplicationsDe la EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- Partially Shaded Operation of A Grid-Tied PV SystemDocument9 paginiPartially Shaded Operation of A Grid-Tied PV SystemheanbuÎncă nu există evaluări
- Modeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTDocument7 paginiModeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTAnonymous CUPykm6DZÎncă nu există evaluări
- Power Electronics Lab ManualDocument28 paginiPower Electronics Lab ManualManjunath KalkutagiÎncă nu există evaluări
- Electric Power Systems Resiliency: Modelling, Opportunity and ChallengesDe la EverandElectric Power Systems Resiliency: Modelling, Opportunity and ChallengesRamesh C. BansalÎncă nu există evaluări
- 3D Photovoltaic Devices Complete Self-Assessment GuideDe la Everand3D Photovoltaic Devices Complete Self-Assessment GuideÎncă nu există evaluări
- Lesson Plan For Haiku and TankaDocument4 paginiLesson Plan For Haiku and TankaJohn Rey PacenaÎncă nu există evaluări
- EE4532 Power Electronics and Drives - OBTLDocument5 paginiEE4532 Power Electronics and Drives - OBTLAaron TanÎncă nu există evaluări
- Syllabus For Power Electronics and DriveDocument34 paginiSyllabus For Power Electronics and Drivearavi1979Încă nu există evaluări
- Power Electronics Course OutlineDocument2 paginiPower Electronics Course OutlineTareq AzizÎncă nu există evaluări
- Lec9 PDFDocument52 paginiLec9 PDFHiongyiiÎncă nu există evaluări
- EE2022 Electrical Energy Systems: Lecture 13: Electric Power Transmission - Transmission Line Modeling 07/03/2013Document50 paginiEE2022 Electrical Energy Systems: Lecture 13: Electric Power Transmission - Transmission Line Modeling 07/03/2013Nemitha LakshanÎncă nu există evaluări
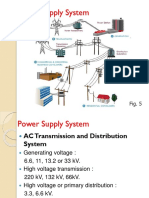
- Power Supply SystemDocument49 paginiPower Supply SystemstephenÎncă nu există evaluări
- EE 249 Lecture 0 Orientation PDFDocument6 paginiEE 249 Lecture 0 Orientation PDFOnofre Algara Jr.Încă nu există evaluări
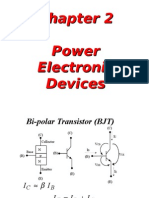
- Chapter2 DevicesDocument33 paginiChapter2 DevicesFrozenTuxÎncă nu există evaluări
- Ee8004 Modern Power Converters SyllabusDocument2 paginiEe8004 Modern Power Converters SyllabussignjpcoeÎncă nu există evaluări
- 11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeDocument29 pagini11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeThanh LeÎncă nu există evaluări
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 paginiModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaÎncă nu există evaluări
- Psoc Course FileDocument14 paginiPsoc Course Filecholleti sriramÎncă nu există evaluări
- Department of Electrical and Electronics Engineering: Third Internal Assessment TestDocument1 paginăDepartment of Electrical and Electronics Engineering: Third Internal Assessment Testsyed1188Încă nu există evaluări
- DC Machine SimulationDocument12 paginiDC Machine Simulationkiranch219Încă nu există evaluări
- EE T65 Digital Signal ProcessingDocument34 paginiEE T65 Digital Signal ProcessingThiagu Rajiv100% (1)
- PSet3 SolnDocument4 paginiPSet3 SolnMichael DillardÎncă nu există evaluări
- Basic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersDocument25 paginiBasic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVÎncă nu există evaluări
- III Eee 05 Ee8501 Psa Unit 1Document37 paginiIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANÎncă nu există evaluări
- Introduction and BackgroundDocument8 paginiIntroduction and Backgroundyohannes getachewÎncă nu există evaluări
- Ee8703 - Res - Unit 3Document55 paginiEe8703 - Res - Unit 3mokkai of the day videos100% (1)
- Solar EnergyDocument30 paginiSolar EnergyJatin Sharma cse 20Încă nu există evaluări
- DDocument2 paginiDRaj KamalÎncă nu există evaluări
- Power Electronics in Wind and Solar System-Sample-Question-Paper (Msbte-Study-Resources) PDFDocument4 paginiPower Electronics in Wind and Solar System-Sample-Question-Paper (Msbte-Study-Resources) PDFRevati KalalÎncă nu există evaluări
- Clean Energy Generation, Integration and Storage (Eee-801) : Dr. Abasin Ulasyar Assistant Professor (NUST USPCAS-E)Document12 paginiClean Energy Generation, Integration and Storage (Eee-801) : Dr. Abasin Ulasyar Assistant Professor (NUST USPCAS-E)Malik Shahzeb Ali0% (1)
- EE 741-Power Quality & System ReliabilityDocument21 paginiEE 741-Power Quality & System ReliabilityAndrey LopesÎncă nu există evaluări
- 5 - Magnetism PDFDocument20 pagini5 - Magnetism PDFRichie BobbyÎncă nu există evaluări
- Lec 1 Introduction To Power ElectronicsDocument38 paginiLec 1 Introduction To Power ElectronicsAfiqah Zainuddin100% (1)
- Unit-I: Introduction of BJTDocument56 paginiUnit-I: Introduction of BJThodeegits9526Încă nu există evaluări
- Eee VL of Unit I, Ii, Iii, Iv, V (2020) )Document95 paginiEee VL of Unit I, Ii, Iii, Iv, V (2020) )Prakash MECH Kiot100% (1)
- Nptel: High Voltage DC Transmission - Web CourseDocument2 paginiNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- Electrical Power ProjectDocument12 paginiElectrical Power ProjectsrnkaÎncă nu există evaluări
- Main Objective:: Student Name: Ga Name: Matric NumberDocument19 paginiMain Objective:: Student Name: Ga Name: Matric NumberlionÎncă nu există evaluări
- Mechatronics SyllabusDocument41 paginiMechatronics SyllabusElstonD'cruzÎncă nu există evaluări
- PQ Unit 1Document21 paginiPQ Unit 1Ezhiln 0328sÎncă nu există evaluări
- 0 IE 2130E Tutorial Problems - 2017 - S2Document7 pagini0 IE 2130E Tutorial Problems - 2017 - S2Denise Isebella LeeÎncă nu există evaluări
- LadderDocument1 paginăLadderDenise Isebella LeeÎncă nu există evaluări
- Nuclear Power in SingaporeDocument6 paginiNuclear Power in SingaporeDenise Isebella LeeÎncă nu există evaluări
- LadderDocument1 paginăLadderDenise Isebella LeeÎncă nu există evaluări
- Application Form SkillsFutureStudyAwardDocument3 paginiApplication Form SkillsFutureStudyAwardDenise Isebella LeeÎncă nu există evaluări
- WISP-SEG-10 Rev01 SEG Gas ManagementDocument12 paginiWISP-SEG-10 Rev01 SEG Gas ManagementDenise Isebella LeeÎncă nu există evaluări
- ME2101E - Assignment On Design Process - 2013Document2 paginiME2101E - Assignment On Design Process - 2013Denise Isebella LeeÎncă nu există evaluări
- ME2151E Learning OutcomesDocument1 paginăME2151E Learning OutcomesDenise Isebella LeeÎncă nu există evaluări
- ME2151E Tut QuestionsDocument10 paginiME2151E Tut QuestionsDenise Isebella LeeÎncă nu există evaluări
- Shine Jun2013Document7 paginiShine Jun2013Denise Isebella LeeÎncă nu există evaluări
- 1341 Oxygen Bomb Calorimeter Manual PDFDocument11 pagini1341 Oxygen Bomb Calorimeter Manual PDFDenise Isebella LeeÎncă nu există evaluări
- Me3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsDocument12 paginiMe3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsDenise Isebella LeeÎncă nu există evaluări
- TM2401 FourierDocument58 paginiTM2401 FourierDenise Isebella LeeÎncă nu există evaluări
- Ascendance of Chinese MestizosDocument13 paginiAscendance of Chinese MestizosAndrea Anne RiveraÎncă nu există evaluări
- SW7 - Themes9 - 10-Further PracticeDocument6 paginiSW7 - Themes9 - 10-Further PracticePhuongÎncă nu există evaluări
- Co2 01Document20 paginiCo2 01Poojitha BondalapatiÎncă nu există evaluări
- Codc - Disconnector (2 State Inputs/ 2 Control Inputs) : 1MRS752350-MUMDocument22 paginiCodc - Disconnector (2 State Inputs/ 2 Control Inputs) : 1MRS752350-MUMhaichau199Încă nu există evaluări
- Conditionals Reading Comprehension and Speaking Practice PDFDocument1 paginăConditionals Reading Comprehension and Speaking Practice PDFNour Mohamed0% (2)
- LogDocument2 paginiLogDanielAdegokeÎncă nu există evaluări
- MUS 2 Referencing SystemDocument4 paginiMUS 2 Referencing SystemJuan Sebastian CorreaÎncă nu există evaluări
- Function ModulesDocument5 paginiFunction ModulesArun S PrabhuÎncă nu există evaluări
- Grammar: A. Comparatives and SuperlativesDocument4 paginiGrammar: A. Comparatives and SuperlativesMinh Nguyễn Viết NhậtÎncă nu există evaluări
- History of ComputerDocument47 paginiHistory of ComputerSharada ShaluÎncă nu există evaluări
- Lesson 5 Reading and WritingDocument9 paginiLesson 5 Reading and WritingAkiruo NeroÎncă nu există evaluări
- Hornbill The Portrait of A LadyDocument2 paginiHornbill The Portrait of A LadyRitika TyagiÎncă nu există evaluări
- Presentation On Library Management SystemDocument23 paginiPresentation On Library Management SystemGurneetÎncă nu există evaluări
- LG 440G TRF UG Print V1.2 130117Document122 paginiLG 440G TRF UG Print V1.2 130117Anonymous Via8qr3Încă nu există evaluări
- CSC108 - Week 1 NotesDocument4 paginiCSC108 - Week 1 NotesMmxSellerÎncă nu există evaluări
- Yii Framework 2.0 API DocumentationDocument25 paginiYii Framework 2.0 API DocumentationArlin Garcia EspinosaÎncă nu există evaluări
- Ccrma Stanford Edu Jos PaspDocument1 paginăCcrma Stanford Edu Jos PaspgovebÎncă nu există evaluări
- Most Thought ProvokingDocument2 paginiMost Thought ProvokingRăzvan DejuÎncă nu există evaluări
- The Interrogator As Critic: The Turing Test and The Evaluation of Generative Music SystemsDocument23 paginiThe Interrogator As Critic: The Turing Test and The Evaluation of Generative Music SystemsΔημήτρης ΓκρίντζοςÎncă nu există evaluări
- SSRN Id3929583Document40 paginiSSRN Id3929583dotarÎncă nu există evaluări
- Tal Reference ManualDocument638 paginiTal Reference ManualAlvaro Pereira PachecoÎncă nu există evaluări
- Xii W.S. PPT of Invitation and Replies NewDocument20 paginiXii W.S. PPT of Invitation and Replies NewAdarsh KumarÎncă nu există evaluări
- Soal EA 8 Grade PATDocument2 paginiSoal EA 8 Grade PATPrayogie ShandityaÎncă nu există evaluări