S-ar putea să vă placă și
- Solns 2cmosDocument18 paginiSolns 2cmosramprakash_rampelliÎncă nu există evaluări
- Sample Filter CalculationDocument20 paginiSample Filter CalculationAbraham JyothimonÎncă nu există evaluări
- Introduction Homework (Power Electronics)Document4 paginiIntroduction Homework (Power Electronics)Arinda SamÎncă nu există evaluări
- 1.2 Introduction - Bus Admittance Matrix and Bus Impedance MatrixDocument27 pagini1.2 Introduction - Bus Admittance Matrix and Bus Impedance MatrixMohd FarhanÎncă nu există evaluări
- A Report On Fault Analysis of Power Distribution SystemsDocument19 paginiA Report On Fault Analysis of Power Distribution SystemsKalyan Ranjan100% (3)
- S1S2122 KE37503 Chapter 4Document100 paginiS1S2122 KE37503 Chapter 4PenziiÎncă nu există evaluări
- Mi PowerDocument24 paginiMi PowerLinu Bhargavan67% (3)
- Front End ConverterDocument66 paginiFront End ConverterKasicheyanula SaichandÎncă nu există evaluări
- Discriminator and Energy Based Demodulators: RevisitedDocument4 paginiDiscriminator and Energy Based Demodulators: RevisitedShakeel RanaÎncă nu există evaluări
- Gate Mock TestDocument15 paginiGate Mock TestTuhinansu PradhanÎncă nu există evaluări
- MultiLayer DONEDocument13 paginiMultiLayer DONEDouglas ColvinÎncă nu există evaluări
- GATE Mock Tests For EEE - by KanodiaDocument154 paginiGATE Mock Tests For EEE - by Kanodiarajesh aryaÎncă nu există evaluări
- Constant Parameter Transmission Line: 1 Theoretical BackgroundDocument11 paginiConstant Parameter Transmission Line: 1 Theoretical Backgroundhatay2009Încă nu există evaluări
- Dfig Book PDFDocument29 paginiDfig Book PDFSrinivasan PurushothamanÎncă nu există evaluări
- IES CONV Electronic Comm. 1998Document9 paginiIES CONV Electronic Comm. 1998gateandiesÎncă nu există evaluări
- DC-DC ConverterDocument24 paginiDC-DC ConverterkandularanjithÎncă nu există evaluări
- Linear Systems Analysis PDFDocument8 paginiLinear Systems Analysis PDFpadmajasivaÎncă nu există evaluări
- 3 Unsymmetrical Faults Eet308 Updated SVDocument74 pagini3 Unsymmetrical Faults Eet308 Updated SVAMar RidhwanÎncă nu există evaluări
- Abdullah Al MahiDocument7 paginiAbdullah Al Mahianisruhan6Încă nu există evaluări
- Digital Filter Design Using MATLABDocument37 paginiDigital Filter Design Using MATLABIftikhar KhanÎncă nu există evaluări
- Protection AsssignmentDocument12 paginiProtection AsssignmentLangelihle XabaÎncă nu există evaluări
- Modeling and Analysis of Differential VcosDocument20 paginiModeling and Analysis of Differential VcosLiu WenÎncă nu există evaluări
- Electrical and Electronic Technology (BEX17003) : DR Soon Chin FhongDocument58 paginiElectrical and Electronic Technology (BEX17003) : DR Soon Chin FhongThiran Boy LingamÎncă nu există evaluări
- 338 Power Systems Electromagnetic Transients Simulation: Figure A.7 PSCAD/EMTDC Ow ChartDocument14 pagini338 Power Systems Electromagnetic Transients Simulation: Figure A.7 PSCAD/EMTDC Ow ChartkjfenÎncă nu există evaluări
- CL CL CL CL Class ASS ASS ASS ASS TEST - 2014 TEST - 2014 TEST - 2014 TEST - 2014 TEST - 2014Document7 paginiCL CL CL CL Class ASS ASS ASS ASS TEST - 2014 TEST - 2014 TEST - 2014 TEST - 2014 TEST - 2014saurabhdabas7Încă nu există evaluări
- Numerical Simulation of Unidirectional Chaotic Synchronization of Non-Autonomous Circuit and Its Application For Secure CommunicationDocument13 paginiNumerical Simulation of Unidirectional Chaotic Synchronization of Non-Autonomous Circuit and Its Application For Secure CommunicationMada Sanjaya WsÎncă nu există evaluări
- An Introduction To Electrostatic ActuatorDocument32 paginiAn Introduction To Electrostatic Actuatormujeeb.abdullah2830Încă nu există evaluări
- CircuitsII SH1Document4 paginiCircuitsII SH1aymanabuzÎncă nu există evaluări
- Gate Ec - 1991:, Vs Zsis =, And - Vt Zt It Vt - T Zt T Ν Ν = Ν Τ ΤDocument13 paginiGate Ec - 1991:, Vs Zsis =, And - Vt Zt It Vt - T Zt T Ν Ν = Ν Τ ΤSanthi SriÎncă nu există evaluări
- Single-Machine Infinite Bus SystemDocument18 paginiSingle-Machine Infinite Bus SystemMuhammad FajraÎncă nu există evaluări
- 2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaDocument3 pagini2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaWGSÎncă nu există evaluări
- Eee 22Document9 paginiEee 22faisal sbennaÎncă nu există evaluări
- Experiment 8 - AttenuatorDocument24 paginiExperiment 8 - AttenuatorswatagodaÎncă nu există evaluări
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 paginiPower System Analysis: Fault Analysis Tom Overbye and Ross BaldickNnaabyendu SahaÎncă nu există evaluări
- Ee602 Ac CircuitDocument26 paginiEe602 Ac CircuitArryshah DahmiaÎncă nu există evaluări
- Lecture 7 BDocument61 paginiLecture 7 BBhavani Chandra UniqueÎncă nu există evaluări
- Electric Circuit and FieldsDocument24 paginiElectric Circuit and Fieldssamg27Încă nu există evaluări
- Zig Zag Transf - 1Document24 paginiZig Zag Transf - 1Razvan Mares100% (2)
- IES Conventional Electronics 2013Document32 paginiIES Conventional Electronics 2013Debi Prasad DashÎncă nu există evaluări
- Simulation Analysis of Lighting Switching Impulse VoltagesDocument13 paginiSimulation Analysis of Lighting Switching Impulse Voltagespeppeto373137Încă nu există evaluări
- Frequecny Response of Lag NetworkDocument4 paginiFrequecny Response of Lag NetworkAnbalagan GuruÎncă nu există evaluări
- Chapter 2p7p4Document18 paginiChapter 2p7p4jassi7010Încă nu există evaluări
- Ispitni Zadaci - ElektrotehnikaDocument14 paginiIspitni Zadaci - ElektrotehnikaAleksandar KrčuljÎncă nu există evaluări
- Gate Ec - 2009 QDocument34 paginiGate Ec - 2009 QRakesh AseryÎncă nu există evaluări
- 01 RLC Circuit and ResonanceDocument46 pagini01 RLC Circuit and ResonanceLatif Nurohman Bayu Nugroho60% (5)
- Resistivity of Wire Electricity Conductor - Dana Santika - Physics - Ganesha University of EducationDocument16 paginiResistivity of Wire Electricity Conductor - Dana Santika - Physics - Ganesha University of EducationI Gede Dana SantikaÎncă nu există evaluări
- Lecture 9 - BMSLec08 - EISDocument22 paginiLecture 9 - BMSLec08 - EISAnchal AnchalÎncă nu există evaluări
- (Reading Assignment) : EE42/100-Spring 2006Document4 pagini(Reading Assignment) : EE42/100-Spring 2006Sova ŽalosnaÎncă nu există evaluări
- 32126Document26 pagini32126chuku7Încă nu există evaluări
- Method of Designing Zvs Boost Converter: Mirosáaw Luft, Elībieta Szychta, Leszek SzychtaDocument5 paginiMethod of Designing Zvs Boost Converter: Mirosáaw Luft, Elībieta Szychta, Leszek SzychtaJeena MathewÎncă nu există evaluări
- Modeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABDocument26 paginiModeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABRajesh NayakÎncă nu există evaluări
- Modified Valley-Fill For Harmonics ReductionDocument4 paginiModified Valley-Fill For Harmonics ReductionAyong HiendroÎncă nu există evaluări
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 paginiPower System Analysis: Fault Analysis Tom Overbye and Ross Baldicka_r_vijayanand6550Încă nu există evaluări
- Resonant CircuitsDocument51 paginiResonant CircuitsHaris Bin KhalidÎncă nu există evaluări
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDe la EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsÎncă nu există evaluări
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsDe la EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikÎncă nu există evaluări
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsDe la EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsÎncă nu există evaluări
- Differential Forms on Electromagnetic NetworksDe la EverandDifferential Forms on Electromagnetic NetworksEvaluare: 4 din 5 stele4/5 (1)
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachDe la EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachÎncă nu există evaluări
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Temperature Monitoring: FaizanDocument5 paginiTemperature Monitoring: FaizankjfenÎncă nu există evaluări
- Selo 1Document26 paginiSelo 1kjfenÎncă nu există evaluări
- Water Treatments: Steam Water Cycle TreatmentDocument2 paginiWater Treatments: Steam Water Cycle TreatmentkjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocument10 paginiDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pagini74HC193 74HCT193: 14. AbbreviationskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: 17. Contact InformationDocument2 pagini74HC193 74HCT193: 17. Contact InformationkjfenÎncă nu există evaluări
- Timer Tutorials 555Document1 paginăTimer Tutorials 555kjfenÎncă nu există evaluări
- 74HC193 74HCT193: 13. Package OutlineDocument2 pagini74HC193 74HCT193: 13. Package OutlinekjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
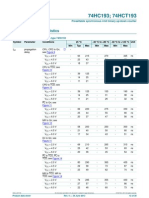
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pagini74HC193 74HCT193: 9. Static CharacteristicskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pagini74HC193 74HCT193: NXP SemiconductorskjfenÎncă nu există evaluări
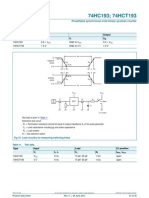
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pagini74HC193 74HCT193: 10. Dynamic CharacteristicskjfenÎncă nu există evaluări
- 44 A Practical Guide To Geomantic Divination 45 The Presiding GeniusDocument1 pagină44 A Practical Guide To Geomantic Divination 45 The Presiding GeniuskjfenÎncă nu există evaluări
- Physical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14ADocument1 paginăPhysical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14AkjfenÎncă nu există evaluări
- Function Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QDocument1 paginăFunction Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QkjfenÎncă nu există evaluări
- Ac Switching Characteristics: 5vandtDocument1 paginăAc Switching Characteristics: 5vandtkjfenÎncă nu există evaluări
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pagini74HC193 74HCT193: 5. Pinning InformationkjfenÎncă nu există evaluări
- Geomantic AstrologyDocument1 paginăGeomantic AstrologykjfenÎncă nu există evaluări
- Absolute Maximum Ratings: Symbol Parameter Min Nom Max UnitsDocument1 paginăAbsolute Maximum Ratings: Symbol Parameter Min Nom Max UnitskjfenÎncă nu există evaluări
- Unit-3 PsocDocument23 paginiUnit-3 PsocDESI BRAHMNÎncă nu există evaluări
- Formation of Ybus Martix by Using Direct PDFDocument5 paginiFormation of Ybus Martix by Using Direct PDFPower System Analysis-1Încă nu există evaluări
- Closed-Form Analysis of Artificial Dielectric Layers-Part I: Properties of A Single Layer Under Plane-Wave IncidenceDocument9 paginiClosed-Form Analysis of Artificial Dielectric Layers-Part I: Properties of A Single Layer Under Plane-Wave Incidencereza mirzakhaniÎncă nu există evaluări
- Lecture 12 Per Unit Calculation and Modeling of ApparatusDocument8 paginiLecture 12 Per Unit Calculation and Modeling of ApparatusmuqthiarÎncă nu există evaluări
- Y BusDocument13 paginiY Busrehan_sadiq1991Încă nu există evaluări
- Psa All Questions and AnswersDocument8 paginiPsa All Questions and AnswersMODERN TELUGAMMAYIÎncă nu există evaluări
- Cut Set EtcDocument40 paginiCut Set Etcpalashkatiyar1234Încă nu există evaluări
- ECE 476 - Power System Analysis Fall 2017: Homework 6Document4 paginiECE 476 - Power System Analysis Fall 2017: Homework 6আশিক পালোয়ানÎncă nu există evaluări
- Inverter Based DG Fault CalculationDocument13 paginiInverter Based DG Fault CalculationhassanÎncă nu există evaluări
- Question Paper - CAPS S-18 PAPERDocument4 paginiQuestion Paper - CAPS S-18 PAPERPrasanna P TitarmareÎncă nu există evaluări
- PMU Lecture 6 - The Impedance Model and ZbusDocument17 paginiPMU Lecture 6 - The Impedance Model and ZbusPoor AdamÎncă nu există evaluări
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesDocument119 paginiEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- Y Bus Chap3Document19 paginiY Bus Chap3Jhala MahipalÎncă nu există evaluări
- Power System-II: Experiment 5 Title: Formulation and Calculation of Y-Bus Matrix of A Given System Using SoftwareDocument39 paginiPower System-II: Experiment 5 Title: Formulation and Calculation of Y-Bus Matrix of A Given System Using SoftwarePrasanna UdataÎncă nu există evaluări
- Example Newton Raphson - Aziahkhamisv1 - 2020Document12 paginiExample Newton Raphson - Aziahkhamisv1 - 2020Nor HanarosÎncă nu există evaluări
- Power System AnalysisDocument5 paginiPower System AnalysisVidyavihar ReddyÎncă nu există evaluări
- Transient StabilityDocument26 paginiTransient StabilitySarojakanti SahooÎncă nu există evaluări
- EE330A: Power SystemsDocument10 paginiEE330A: Power SystemsGovind SharmaÎncă nu există evaluări
- IV Year Syllabus-2023-24Document34 paginiIV Year Syllabus-2023-24yashwanth h nÎncă nu există evaluări
- Spreadsheet Implementations For Solving Power-Flow ProblemsDocument21 paginiSpreadsheet Implementations For Solving Power-Flow ProblemsDaryAntoÎncă nu există evaluări
- Syllabus:: Electrical Dept. Electrical Power III Dr. Omar AlazzawiDocument97 paginiSyllabus:: Electrical Dept. Electrical Power III Dr. Omar AlazzawiAkram KhasheaÎncă nu există evaluări
- Formation of Y-Bus MatrixDocument4 paginiFormation of Y-Bus MatrixSadil BatafÎncă nu există evaluări
- Caps QBDocument44 paginiCaps QBRit60% (5)
- Admittance Matrix: PPT Submitted by RC - 1308 - 792, RIT, Berhampur Is Licensed Under TheDocument17 paginiAdmittance Matrix: PPT Submitted by RC - 1308 - 792, RIT, Berhampur Is Licensed Under Theআশিক পালোয়ানÎncă nu există evaluări
- ICPS Gtu PaperDocument7 paginiICPS Gtu PaperHrushikesh DalichaÎncă nu există evaluări
- Newton-Raphson State Estimation Solution Employing Systematically Constructed Jacobian MatrixDocument5 paginiNewton-Raphson State Estimation Solution Employing Systematically Constructed Jacobian MatrixMuhudin Mohammed SemanÎncă nu există evaluări