S-ar putea să vă placă și
- Catalogo Escavadeira EC27CDocument433 paginiCatalogo Escavadeira EC27CNilton Junior Kern50% (2)
- Spring 12 ECON-E370 IU Exam 1 ReviewDocument27 paginiSpring 12 ECON-E370 IU Exam 1 ReviewTutoringZoneÎncă nu există evaluări
- MARTELINO Vs Alejandro DigestDocument1 paginăMARTELINO Vs Alejandro Digestheirarchy100% (2)
- Iroquois Clothes and WampumDocument3 paginiIroquois Clothes and Wampumapi-254323856Încă nu există evaluări
- Observadores Verghese SandersDocument10 paginiObservadores Verghese SandersJosé Moraes Gurgel NetoÎncă nu există evaluări
- Order Reduction For Large Scale Finite Element Models: A Systems PerspectiveDocument21 paginiOrder Reduction For Large Scale Finite Element Models: A Systems PerspectiveAnonymous lEBdswQXmxÎncă nu există evaluări
- Avr Ieee Dc1Document6 paginiAvr Ieee Dc1Diego J. AlverniaÎncă nu există evaluări
- Determination of Modal Residues and Residual Flexibility For Time-Domain System RealizationDocument31 paginiDetermination of Modal Residues and Residual Flexibility For Time-Domain System RealizationSamagassi SouleymaneÎncă nu există evaluări
- Intelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsDocument19 paginiIntelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsChernet TugeÎncă nu există evaluări
- What Is System Identification: Different Approaches To System Identification Depending On Model ClassDocument48 paginiWhat Is System Identification: Different Approaches To System Identification Depending On Model ClassSuji RajanÎncă nu există evaluări
- Learning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output DataDocument6 paginiLearning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output Datasho bhaÎncă nu există evaluări
- XTP23 151 Paperstampedno PDFDocument6 paginiXTP23 151 Paperstampedno PDFUsef UsefiÎncă nu există evaluări
- Abstraction and Counterexample-Guided Refinement in Model Checking of Hybrid SystemsDocument22 paginiAbstraction and Counterexample-Guided Refinement in Model Checking of Hybrid Systemszhi.han1091Încă nu există evaluări
- Modelling AssignmentDocument5 paginiModelling AssignmentDaniel IlesÎncă nu există evaluări
- Linear Feedback ControlDocument14 paginiLinear Feedback ControlHung TuanÎncă nu există evaluări
- Calibration Using GaDocument6 paginiCalibration Using GaDinesh KumarÎncă nu există evaluări
- Engineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimDocument9 paginiEngineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimEduardo PutzÎncă nu există evaluări
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDocument4 paginiRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsÎncă nu există evaluări
- Plugin 1 s2.0 S0167691198000127 Main PDFDocument7 paginiPlugin 1 s2.0 S0167691198000127 Main PDFUsef UsefiÎncă nu există evaluări
- Document 770Document6 paginiDocument 770thamthoiÎncă nu există evaluări
- Fuzzy System Modeling by Fuzzy Partition and GA Hybrid SchemesDocument10 paginiFuzzy System Modeling by Fuzzy Partition and GA Hybrid SchemesOctavio AsÎncă nu există evaluări
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDocument15 paginiBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Încă nu există evaluări
- Ijer 2014 205Document4 paginiIjer 2014 205Innovative Research Publications0% (1)
- Art 1Document8 paginiArt 1Anselmo Mtz GagosÎncă nu există evaluări
- Ifac Workshop On Distributed Estimation and Control in Networked Systems (Netsys 2012), September 14-15, Santa Barbara, California, USA. ThisDocument7 paginiIfac Workshop On Distributed Estimation and Control in Networked Systems (Netsys 2012), September 14-15, Santa Barbara, California, USA. Thisfalcon_vamÎncă nu există evaluări
- Detect Abrupt System Changes Using Identification TechniquesDocument6 paginiDetect Abrupt System Changes Using Identification TechniquesPierpaolo VergatiÎncă nu există evaluări
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDocument4 paginiChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsÎncă nu există evaluări
- Long-Term Prediction of Time Series Using State-Space ModelsDocument11 paginiLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosÎncă nu există evaluări
- Designing Controller by State Space Techniques Using Reduced Order Model AlgorithmDocument5 paginiDesigning Controller by State Space Techniques Using Reduced Order Model AlgorithmGladiolus TranÎncă nu există evaluări
- Ad Pap 1Document6 paginiAd Pap 1Riccardo MathisÎncă nu există evaluări
- An Insight Into Noise Covariance Estimation For Kalman Filter DesignDocument6 paginiAn Insight Into Noise Covariance Estimation For Kalman Filter DesignAzhar IqbalÎncă nu există evaluări
- On Sensor Model Design Choices For Humanoid Robot LocalizationDocument12 paginiOn Sensor Model Design Choices For Humanoid Robot LocalizationssfofoÎncă nu există evaluări
- Robust Automatic Mapping Algorithms in A Network Monitoring ScenarioDocument12 paginiRobust Automatic Mapping Algorithms in A Network Monitoring Scenarioseyyed81Încă nu există evaluări
- Robust Kinetic Convex Hulls in 3D: Abstract. Kinetic Data Structures Provide A Framework For ComputDocument12 paginiRobust Kinetic Convex Hulls in 3D: Abstract. Kinetic Data Structures Provide A Framework For ComputAnonymous RrGVQjÎncă nu există evaluări
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 paginiA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeÎncă nu există evaluări
- Hardware Implementation of Finite Fields of Characteristic ThreeDocument11 paginiHardware Implementation of Finite Fields of Characteristic ThreehachiiiimÎncă nu există evaluări
- Kalman Filter For Control of SattelitesDocument6 paginiKalman Filter For Control of SattelitesHari B SubediÎncă nu există evaluări
- 1999 - Rev - Reference Based Stochastic Subspace Identificarion For Output-Only Modal Analysis - 1999Document24 pagini1999 - Rev - Reference Based Stochastic Subspace Identificarion For Output-Only Modal Analysis - 1999Guille Ciprian NoaÎncă nu există evaluări
- C D B F O T-S F B M: Ontroller Esign Ased On Uzzy Bservers For Uzzy Ilinear OdelsDocument16 paginiC D B F O T-S F B M: Ontroller Esign Ased On Uzzy Bservers For Uzzy Ilinear OdelsijctcmjournalÎncă nu există evaluări
- Model Order Reduction by Mixedmathematical Methods: Sumit Mondal, Pratibha TripathiDocument4 paginiModel Order Reduction by Mixedmathematical Methods: Sumit Mondal, Pratibha TripathiInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- C D Gps D P T M R S E: Omparing Ifferent ATA RocessingDocument21 paginiC D Gps D P T M R S E: Omparing Ifferent ATA RocessingGisell Vanessa Gamboa SandovalÎncă nu există evaluări
- Problem, Analysis of Forecasting Methods and ModelsDocument6 paginiProblem, Analysis of Forecasting Methods and ModelsCentral Asian StudiesÎncă nu există evaluări
- Efficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsDocument8 paginiEfficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsRekhaPadmanabhanÎncă nu există evaluări
- Design and Implementation of Proportional Integral Observer Based Linear Model Predictive ControllerDocument8 paginiDesign and Implementation of Proportional Integral Observer Based Linear Model Predictive ControllerIDESÎncă nu există evaluări
- Analogue Realizations of Fractional-Order ControllersDocument16 paginiAnalogue Realizations of Fractional-Order Controllerstarunag72801Încă nu există evaluări
- XX Paper 24Document9 paginiXX Paper 24VindhyaÎncă nu există evaluări
- Journal Pre-Proofs: International Journal of Electronics and Commu-NicationsDocument27 paginiJournal Pre-Proofs: International Journal of Electronics and Commu-NicationspetruskaraÎncă nu există evaluări
- Approximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Document22 paginiApproximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Anonymous lEBdswQXmxÎncă nu există evaluări
- On The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-FeedbackDocument6 paginiOn The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-Feedbackmjksh62Încă nu există evaluări
- State Space A To NPGMV ControlDocument43 paginiState Space A To NPGMV ControlSohibul HajahÎncă nu există evaluări
- A Modified Grey Forecasting Model For Long-Term PredictionDocument8 paginiA Modified Grey Forecasting Model For Long-Term PredictionsvarogusÎncă nu există evaluări
- Linear Estimation For Random Delay SystemsDocument10 paginiLinear Estimation For Random Delay SystemsPraneeth BobbaÎncă nu există evaluări
- Landau RSTDocument11 paginiLandau RSTpbaculimaÎncă nu există evaluări
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDocument6 paginiFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87Încă nu există evaluări
- Orlando Newmark Bogday 05Document15 paginiOrlando Newmark Bogday 05Alex AraújoÎncă nu există evaluări
- Stabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlDocument5 paginiStabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlVirgili0Încă nu există evaluări
- General-to-Specific Reductions of Vector Autoregressive ProcessesDocument20 paginiGeneral-to-Specific Reductions of Vector Autoregressive ProcessesAhmed H ElsayedÎncă nu există evaluări
- Pre PrintDocument30 paginiPre Printgorot1Încă nu există evaluări
- fp455 PDFDocument7 paginifp455 PDFc_u_r_s_e_dÎncă nu există evaluări
- Selection of A ModelDocument5 paginiSelection of A ModelKartavya BhagatÎncă nu există evaluări
- Stability of Model Predictive Control Based On Reduced-Order ModelsDocument6 paginiStability of Model Predictive Control Based On Reduced-Order Modelskaies02Încă nu există evaluări
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodDe la EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodÎncă nu există evaluări
- Integer Optimization and its Computation in Emergency ManagementDe la EverandInteger Optimization and its Computation in Emergency ManagementÎncă nu există evaluări
- 1 BrochureDocument2 pagini1 BrochureAnonymous rTRz30fÎncă nu există evaluări
- 01 MarginsDocument4 pagini01 MarginsAnonymous rTRz30fÎncă nu există evaluări
- Modelling of Uncertain SystemDocument13 paginiModelling of Uncertain SystemAnonymous rTRz30fÎncă nu există evaluări
- Krishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Document1 paginăKrishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Anonymous rTRz30fÎncă nu există evaluări
- Ojee ScheduleDocument2 paginiOjee ScheduleAnonymous rTRz30fÎncă nu există evaluări
- 2.1.2 Primary Control Techniques in AC MicrogridsDocument1 pagină2.1.2 Primary Control Techniques in AC MicrogridsAnonymous rTRz30fÎncă nu există evaluări
- Prof. Alireza Khaligh: Power Electronics Laboratory (MPEL) at The Electrical andDocument3 paginiProf. Alireza Khaligh: Power Electronics Laboratory (MPEL) at The Electrical andAnonymous rTRz30fÎncă nu există evaluări
- Properties of Electrical Engineering MaterialsDocument393 paginiProperties of Electrical Engineering MaterialsManikanta Phanikumar100% (2)
- 02 WholeDocument287 pagini02 WholeAnonymous rTRz30fÎncă nu există evaluări
- Cuiqing Du PH DDocument130 paginiCuiqing Du PH DAnonymous rTRz30fÎncă nu există evaluări
- Properties of Electrical Engineering MaterialsDocument393 paginiProperties of Electrical Engineering MaterialsManikanta Phanikumar100% (2)
- AdvertisementDocument1 paginăAdvertisementAnonymous rTRz30fÎncă nu există evaluări
- 02 WholeDocument287 pagini02 WholeAnonymous rTRz30fÎncă nu există evaluări
- National Institute of Technology, Hamirpur 177 005 (HP) : Application Form For Faculty Position On Contract BasisDocument2 paginiNational Institute of Technology, Hamirpur 177 005 (HP) : Application Form For Faculty Position On Contract BasisMehanathan Maggie MikeyÎncă nu există evaluări
- 2Document6 pagini2Anonymous rTRz30fÎncă nu există evaluări
- Matlab IdentificationDocument408 paginiMatlab IdentificationAnonymous rTRz30fÎncă nu există evaluări
- AnsDocument7 paginiAnsAnonymous rTRz30fÎncă nu există evaluări
- l8 File PDFDocument19 paginil8 File PDFAnonymous rTRz30fÎncă nu există evaluări
- Brief Introduction About TRMSDocument1 paginăBrief Introduction About TRMSAnonymous rTRz30fÎncă nu există evaluări
- Olivebranch Menu1Document7 paginiOlivebranch Menu1Anonymous rTRz30fÎncă nu există evaluări
- State SpaceDocument9 paginiState SpaceAnonymous rTRz30fÎncă nu există evaluări
- CVX UsrguideDocument72 paginiCVX UsrguideWilly WenÎncă nu există evaluări
- What Do You Mean by Penalizing SomethingDocument1 paginăWhat Do You Mean by Penalizing SomethingAnonymous rTRz30fÎncă nu există evaluări
- Analysis of A Pendulum ProblemDocument17 paginiAnalysis of A Pendulum ProblemAnonymous rTRz30fÎncă nu există evaluări
- Harmonic Analysis of Operators in Hilbert Sapces Nagy Foias PDFDocument401 paginiHarmonic Analysis of Operators in Hilbert Sapces Nagy Foias PDFAnonymous rTRz30fÎncă nu există evaluări
- Struct Examples PDFDocument33 paginiStruct Examples PDFAnonymous rTRz30fÎncă nu există evaluări
- Programming and Data StructureDocument108 paginiProgramming and Data Structureali-abdul-razzaq-266100% (1)
- Listening Skills PDFDocument26 paginiListening Skills PDFAnonymous rTRz30fÎncă nu există evaluări
- Vertical Cutoff WallsDocument18 paginiVertical Cutoff WallsMark LaiÎncă nu există evaluări
- Note Hand-Soldering eDocument8 paginiNote Hand-Soldering emicpreampÎncă nu există evaluări
- Offshore Training Matriz Matriz de Treinamentos OffshoreDocument2 paginiOffshore Training Matriz Matriz de Treinamentos OffshorecamiladiasmanoelÎncă nu există evaluări
- Small Data, Big Decisions: Model Selection in The Small-Data RegimeDocument10 paginiSmall Data, Big Decisions: Model Selection in The Small-Data Regimejuan carlos monasterio saezÎncă nu există evaluări
- MPPSC ACF Test Paper 8 (26 - 06 - 2022)Document6 paginiMPPSC ACF Test Paper 8 (26 - 06 - 2022)Hari Harul VullangiÎncă nu există evaluări
- Volvo Catalog Part2Document360 paginiVolvo Catalog Part2Denis Konovalov71% (7)
- Sinamics g120p Cabinet Catalog d35 en 2018Document246 paginiSinamics g120p Cabinet Catalog d35 en 2018Edgar Lecona MÎncă nu există evaluări
- D.O. 221-A - Application Form (Renewal)Document1 paginăD.O. 221-A - Application Form (Renewal)Karl PagzÎncă nu există evaluări
- Synchronous Machines-1Document41 paginiSynchronous Machines-1Rouxcel abutoÎncă nu există evaluări
- Hauling AgreementDocument2 paginiHauling AgreementE.A. Francisco Trucking100% (3)
- Market EquilibriumDocument36 paginiMarket EquilibriumLiraOhÎncă nu există evaluări
- Thompson, Damon - Create A Servitor - How To Create A Servitor and Use The Power of Thought FormsDocument49 paginiThompson, Damon - Create A Servitor - How To Create A Servitor and Use The Power of Thought FormsMike Cedersköld100% (5)
- White Cataract What To AssesDocument2 paginiWhite Cataract What To Assesalif andraÎncă nu există evaluări
- BBAG MPR and STR LISTSDocument25 paginiBBAG MPR and STR LISTShimanshu ranjanÎncă nu există evaluări
- Service Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesDocument3 paginiService Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesSamarÎncă nu există evaluări
- History of Old English GrammarDocument9 paginiHistory of Old English GrammarAla CzerwinskaÎncă nu există evaluări
- WellaPlex Technical 2017Document2 paginiWellaPlex Technical 2017Rinita BhattacharyaÎncă nu există evaluări
- Volcano Lesson PlanDocument5 paginiVolcano Lesson Planapi-294963286Încă nu există evaluări
- Review and Basic Principles of PreservationDocument43 paginiReview and Basic Principles of PreservationKarl Marlou Bantaculo100% (1)
- IEEE 802 StandardsDocument14 paginiIEEE 802 StandardsHoney RamosÎncă nu există evaluări
- Aashirwaad Notes For CA IPCC Auditing & Assurance by Neeraj AroraDocument291 paginiAashirwaad Notes For CA IPCC Auditing & Assurance by Neeraj AroraMohammed NasserÎncă nu există evaluări
- Chandigarh Distilers N BotlersDocument3 paginiChandigarh Distilers N BotlersNipun GargÎncă nu există evaluări
- 5 24077 Rev2 PDFDocument3 pagini5 24077 Rev2 PDFJavier GarcíaÎncă nu există evaluări
- PEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)Document13 paginiPEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)lbaker2009Încă nu există evaluări
- One and Half SindromeDocument4 paginiOne and Half SindromeYulia DamayantiÎncă nu există evaluări
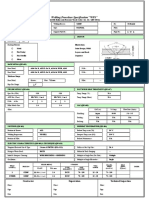
- Wps For Carbon Steel THK 7.11 GtawDocument1 paginăWps For Carbon Steel THK 7.11 GtawAli MoosaviÎncă nu există evaluări